一种基于时频能量的水下推进器故障诊断系统及诊断方法
1.本发明涉及水下机器人推进器故障诊断,具体是涉及一种基于时频能量的水下推进器故障诊断系统及诊断方法。
背景技术:
2.随着陆地资源日益枯竭,海洋资源开发需求逐渐增大。水下机器人是海洋资源开发中的重要装备。水下推进器是水下机器人的常用动力元件,由于水下推进器载荷重,水下推进器易发生故障。及时发现水下推进器的故障对保障水下作业任务的顺利进行以及水下机器人的安全具有重要意义。故障诊断是监测水下推进器运行状态的常用技术,水下推进器故障诊断可分为故障特征提取和故障样本分类两个方面。
3.现有技术中,申请号为201910001146.0,名称为“故障能量区域边界识别及特征提取方法”的中国专利申请,公开了一种水下推进器故障特征提取的方法,该专利在进行故障能量区域边界识别时,利用小波近似分量对应的频带来识别时频功率谱中故障能量区域的频域边界,对于水下推进器的故障诊断取得了良好的效果,但为选取合适的小波近似分量,首先需要根据故障能量区域的频带特性选取合适的小波基函数,由于不同工况下、不同推进器故障程度下,故障能量区域的频带特性均不相同,针对一种故障能量区域特性选取的小波基函数难以适用于其他故障能量区域的频域边界识别,而针对每一种故障能量区域都选取一个合适的小波基函数,费时费力。
4.又如,申请号为201811609960.2,名称为“基于融合信号时域能量与时频熵的水下推进器故障程度辨识方法”的中国专利申请,该专利采用原始故障特征构造故障样本,基于支持向量数据描述算法对故障样本进行分类。该方法在每种工况下都需有充足的训练样本。由于水下机器人在作业过程中,工况的变化是连续的,因此,将有无穷多种工况,导致为每一种工况都配备充足的训练样本是难以实现的。如果在拥有充足训练样本的工况下建立故障分类模型,然后将该故障分类模型应用于无训练样本的工况时,由于不同工况下的故障样本分布差异较大,导致故障分类模型在无训练样本工况下的分类精度较低。
技术实现要素:
5.发明目的:针对以上缺点,本发明提供一种规避小波基函数选取,省时省力的基于时频能量的水下推进器故障迁移诊断系统。
6.本发明还提供一种基于时频能量的水下推进器故障诊断方法。
7.技术方案:为解决上述问题,本发明采用一种基于时频能量的水下推进器故障诊断系统,包括:信号采集模块,用于获取时间长度为l1的水下机器人动态信号;
8.时域边界计算模块,用于计算得到水下机器人动态信号时频功率谱中故障能量区域的时域边界;
9.频域边界计算模块,用于根据时频功率谱中时域边界内外的能量差,得到水下机器人动态信号时频功率谱中故障能量区域的频域边界,得到时频功率谱中时域边界内外的
能量差曲线,能量差曲线中能量差最大值对应的频率为故障能量区域的频域上边界f
u
,以能量差最大值所在位置为起点,沿着能量差曲线向左延伸至局部能量差极小值,局部能量差极小值对应的频率为故障能量区域的频域下边界f
l
;
10.故障特征计算模块,用于将时域边界和频域边界内的时频功率谱的和作为水下推进器故障的时频能量故障特征;
11.模型建立模块,用于将多组不同工况样本下对应的时频能量故障特征,基于支持向量数据描述算法建立水下推进器故障分类模型。
12.本发明还采用一种基于时频能量的水下推进器故障诊断系统的诊断方法,包括以下步骤:
13.(1)获取时间长度为l1的水下机器人动态信号;
14.(2)通过平滑伪维格纳
‑
威利分布算法得到水下机器人动态信号的时频功率谱spwvd(n,m),其中,n为时间节拍,n=1,2,3,
…
,l1,m为频率轴序号,m=1,2,3,
…
,n3;n3为频率轴划分区间数;
15.(3)根据步骤(2)中时频功率谱spwvd(n,m)得到瞬时功率谱熵曲线,并根据瞬时功率谱熵曲线得到故障能量区域的时域边界,其中,故障能量区域的时域下边界为t
l
,故障能量区域的时域上边界为t
u
;
16.(4)在时频功率谱中划分时域下边界t
l
和时域上边界t
u
,并计算时频功率谱中时域边界内外的能量差:
[0017][0018]
其中,t为时间节拍,i和k为频率轴序号;
[0019]
(5)确定时频功率谱中故障能量区域的频域边界:
[0020]
根据步骤(4)得到能量差曲线,能量差曲线中能量差最大值对应的频率为故障能量区域的频域上边界f
u
,以能量差最大值所在位置为起点,沿着能量差曲线向左延伸至局部能量差极小值,局部能量差极小值对应的频率为故障能量区域的频域下边界f
l
;
[0021]
(6)将步骤(3)得到的时域边界和步骤(5)得到的频域边界内的时频功率谱的和作为水下推进器故障的时频能量故障特征:
[0022][0023]
其中,f为时频能量故障特征,t为时间节拍,i为频率轴序号;
[0024]
(7)重复步骤(1)到步骤(6),得到多组不同工况样本下的多组时频能量故障特征,然后基于支持向量数据描述算法建立水下推进器故障分类模型;
[0025]
(8)根据获取的水下机器人动态信号,得到当前工况下水下推进器的时频能量故障特征,根据步骤(7)的故障分类模型,对此时水下推进器的故障类型进行诊断。
[0026]
进一步的,所述步骤(7)中包括对时频能量故障特征进行归一化处理,并利用归一化后的时频能量故障特征建立水下推进器故障分类模型,时频能量故障特征归一化处理为:
[0027][0028]
其中,c表示某一工况,
c
f
λnor
表示c工况下归一化后的时频能量故障特征,
c
f
λ
表示c工况下对应于故障程度为λ时的原始时频能量故障特征,
c
f
min
表示c工况下原始时频能量故障特征最小值,
c
f
max
表示c工况下原始时频能量故障特征最大值,|
c
f
max
‑
c
f
min
|表示c工况下的归一化尺度。
[0029]
进一步的,所述步骤(2)中时频功率谱spwvd(n,m)的计算公式为:
[0030][0031]
其中,spwvd(n,m)为时频功率谱,h(k)为频域方向的平滑窗函数,k为函数自变量,k=
‑
(l
‑
1)~(l
‑
1),l为不大于(n3)/4的最大整数;g(l)为时域方向的平滑窗函数,l为函数自变量,l=
‑
(m
‑
1)~(m
‑
1),m为不大于(n3)/5的最大整数;z(n)为水下推进器动态信号的解析信号,z*(n)为z(n)的共轭复数,j为复数的虚部。
[0032]
进一步的,所述步骤(3)中瞬时功率谱熵曲线的计算公式为:
[0033][0034][0035]
其中,p(n,m)为概率密度函数,h(n)是瞬时功率谱熵曲线。
[0036]
进一步的,所述步骤(3)中根据瞬时功率谱熵曲线得到故障能量区域的时域边界具体内容为:
[0037]
计算时间节拍的对应瞬时功率谱熵,当取n=1,m=1,2,3,
…
,n3时,计算得到h(1),当取n=2,m=1,2,3,
…
,n3时,计算得到h(2),以此类推,最后得到h(l1);确定瞬时功率谱熵曲线中的最小值,以最小值所在位置为起点,分别沿着该曲线向两侧延伸至局部极大值,其中,左侧局部极大值对应时间节拍定为故障能量区域的时域下边界t
l
,右侧局部极大值对应时间节拍定为故障能量区域的时域上边界t
u
。
[0038]
进一步的,所述水下机器人动态信号包括水下推进器纵向速度信号和推进器控制电压变化率。
[0039]
本发明还采用一种基于时频能量的水下推进器故障诊断系统的诊断方法,获取多组水下机器人动态信号,训练得到多组不同工况样本下对应的时频能量故障特征,根据有训练样本的工况得到的时频能量故障特征,对无训练样本工况进行时频能量故障特征估计,利用有训练样本工况和无训练样本工况的时频能量故障特征,基于水下推进器故障分类模型迁移学习建立新故障分类模型,具体包括以下步骤:
[0040]
(11)得到多组有训练样本工况下的时频能量故障特征,包括工况c1和工况c2;
[0041]
(12)估计无训练样本工况下的时频能量故障特征最大值:
[0042][0043]
其中,c1、c2表示有训练样本的某一工况,c
u
表示无训练样本的某一工况,表示c1工况下原始时频能量故障特征最大值,表示c2工况下原始时频能量故障特征最大值,表示c
u
工况下原始时频能量故障特征最大值;
[0044]
(13)估计无训练样本工况下的归一化尺度:
[0045][0046]
其中,表示c1工况下的归一化尺度,表示c2工况下的归一化尺度,表示c
u
工况下的归一化尺度;
[0047]
(14)估计无训练样本工况下的时频能量故障特征最小值:
[0048][0049]
(15)对多组有训练样本工况及无训练样本工况的时频能量故障特征进行归一化处理,利用归一化后的时频能量故障特征,基于水下推进器故障分类模型迁移学习建立新故障分类模型;
[0050]
(16)根据获取的水下机器人动态信号,得到当前工况下水下推进器的时频能量故障特征,根据步骤(15)的新故障分类模型,对此时水下推进器的故障类型进行诊断。
[0051]
有益效果:本发明相对于现有技术,其显著优点是采用能量差曲线最大值所在位置为故障区域能量频域上边界,以其左侧局部极小值所在位置为故障能量区域频域下边界,这种方式不依赖于故障能量区域的具体频带特性,具有通用性,规避了小波基函数的选取,省时省力。
[0052]
本发明通过一系列归一化处理,将不同工况下的故障样本映射到同一变化尺度空间,从而减小不同工况下的故障样本分布差异,完成故障特征分布适配,进而提高故障分类模型在无训练样本工况下的分类精度。
附图说明
[0053]
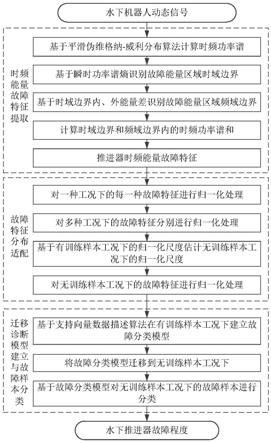
图1所示为本发明诊断方法的流程示意图;
[0054]
图2所示为本发明中纵向目标速度为0.3m/s的水下机器人动态信号;
[0055]
图3所示为本发明中水下机器人纵向速度信号时频功率谱;
[0056]
图4所示为本发明中瞬时功率谱熵曲线图;
[0057]
图5所示为本发明中故障能量区域时域边界划分示意图;
[0058]
图6所示为本发明中时频功率谱中时域边界内、外能量差曲线图;
[0059]
图7所示为本发明中故障能量区域频域边界划分示意图;
[0060]
图8所示为本发明中水下机器人纵向速度信号对应的故障特征;
[0061]
图9所示为本发明中水下推进器控制电压变化率对应的故障特征;
[0062]
图10所示为本发明中不同工况下原始故障样本分布示意图;
[0063]
图11所示为本发明中同一种工况下每一种故障特征归一化后的故障样本分布示
意图;
[0064]
图12所示为本发明中不同工况下每一种故障特征归一化后的故障样本分布示意图;
[0065]
图13所示为本发明中无训练样本工况下每一种故障特征归一化后的故障样本分布示意图。
具体实施方式
[0066]
实施例1
[0067]
本实施例中一种基于时频能量的水下推进器故障诊断系统,包括:
[0068]
信号采集模块,用于获取时间长度为l1的水下机器人动态信号,水下机器人动态信号包括水下机器人纵向速度信号和推进器控制电压变化率等动态信号;
[0069]
时域边界计算模块,采用公知平滑伪维格纳
‑
威利分布算法求取水下机器人动态信号的时频功率谱,计算得到水下机器人动态信号时频功率谱中故障能量区域的时域边界;
[0070]
频域边界计算模块,用于根据时频功率谱中时域边界内外的能量差,得到水下机器人动态信号时频功率谱中故障能量区域的频域边界,得到时频功率谱中时域边界内外的能量差曲线,能量差曲线中能量差最大值对应的频率为故障能量区域的频域上边界f
u
,以能量差最大值所在位置为起点,沿着能量差曲线向左延伸至局部能量差极小值,局部能量差极小值对应的频率为故障能量区域的频域下边界f
l
;
[0071]
故障特征计算模块,用于将时域边界和频域边界内的时频功率谱的和作为水下推进器故障的时频能量故障特征;
[0072]
模型建立模块,用于将多组不同工况样本下对应的时频能量故障特征,基于支持向量数据描述算法建立水下推进器故障分类模型。
[0073]
实施例2
[0074]
本实施例中一种基于时频能量的水下推进器故障诊断方法,包括以下步骤:
[0075]
(1)获取时间长度为l1的水下机器人动态信号,包括采集并记录水下机器人纵向速度信号和推进器控制电压变化率等动态信号;
[0076]
(2)通过平滑伪维格纳
‑
威利分布算法得到水下机器人动态信号的时频功率谱:
[0077][0078]
其中,spwvd(n,m)为时频功率谱,n为时间节拍,n=1,2,3,
…
,l1,m为频率轴序号,m=1,2,3,
…
,n3,n3为频率轴划分区间数;h(k)为频域方向的平滑窗函数,k为函数自变量,k=
‑
(l
‑
1)~(l
‑
1),l为不大于(n3)/4的最大整数;g(l)为时域方向的平滑窗函数,l为函数自变量,l=
‑
(m
‑
1)~(m
‑
1),m为不大于(n3)/5的最大整数;z(n)为水下推进器动态信号的解析信号,z
*
(n)为z(n)的共轭复数,j为复数的虚部。
[0079]
(3)根据步骤(2)中时频功率谱spwvd(n,m)得到瞬时功率谱熵曲线:
[0080]
[0081][0082]
其中,p(n,m)为概率密度函数,h(n)是瞬时功率谱熵曲线;
[0083]
计算时间节拍的对应瞬时功率谱熵,当取n=1,m=1,2,3,
…
,n3时,计算得到h(1),当取n=2,m=1,2,3,
…
,n3时,计算得到h(2),以此类推,最后得到h(l1);
[0084]
确定瞬时功率谱熵曲线中的最小值,以最小值所在位置为起点,分别沿着该曲线向两侧延伸至局部极大值,其中,左侧局部极大值对应时间节拍定为故障能量区域的时域下边界t
l
,右侧局部极大值对应时间节拍定为故障能量区域的时域上边界t
u
;
[0085]
(4)在时频功率谱中划分时域下边界t
l
和时域上边界t
u
,并计算时频功率谱中时域边界内外的能量差:
[0086][0087]
其中,t为时间节拍,i和k为频率轴序号;
[0088]
(5)确定时频功率谱中故障能量区域的频域边界,推进器故障在时频功率谱的时域边界内,引起能量从高频带向低频带的故障能量区域转移,使得在不含故障信息的频带内,时域边界内的能量小于时域边界外的能量,在只含故障信息的频带内,时域边界内的能量大于时域边界外的能量,因此,一个频带内,含有故障信息越少,时域边界内、外的能量差越小,含有故障信息越多,时域边界内、外的能量差越大,本实施例中设定一个构造频带,以零频为构造频带的下边界,逐步增大构造频带的上边界,在构造频带的上边界到达故障能量区域的下边界之前,由于构造频带内不含故障信息,所以构造频带内的时域边界内、外的能量差逐渐减小,当构造频带上边界大于故障能量区域的下边界,且小于故障能量区域的上边界时,由于构造频带内故障信息比例逐渐增大,所以,构造频带内的时域边界内、外的能量差逐渐增大,在构造频带的上边界达到故障能量区域的上边界时,构造频带内的时域边界内、外的能量差达到最大值,当构造频带的上边界继续增大,直至达到时频功率谱最大频率时,由于构造频带内故障信息所占比例逐渐减小,所以构造频带内的时域边界内、外的能量差再次逐渐减小,具体为:
[0089]
根据步骤(4)得到能量差曲线,能量差曲线中能量差最大值对应的频率为故障能量区域的频域上边界f
u
,以能量差最大值所在位置为起点,沿着能量差曲线向左延伸至局部能量差极小值,局部能量差极小值对应的频率为故障能量区域的频域下边界f
l
,这种方式不依赖于故障能量区域的具体频带特性,具有通用性,规避了小波基函数的选取,省时省力;
[0090]
(6)将步骤(3)得到的时域边界和步骤(5)得到的频域边界内的时频功率谱的和作为水下推进器故障的时频能量故障特征:
[0091][0092]
其中,f为时频能量故障特征,t为时间节拍,i为频率轴序号;
[0093]
(7)重复步骤(1)到步骤(6),得到多组不同工况样本下的多组时频能量故障特征,在每一种拥有充足训练样本的工况下,分别对各工况中的每一种时频能量故障特征进行归
一化处理,使每一种时频能量故障特征的变化范围均为0~1,并利用归一化后的时频能量故障特征,基于支持向量数据描述算法建立水下推进器故障分类模型,时频能量故障特征归一化处理为:
[0094][0095]
其中,c表示某一工况,
c
f
λnor
表示c工况下归一化后的时频能量故障特征,
c
f
λ
表示c工况下对应于故障程度为λ时的原始时频能量故障特征,
c
f
min
表示c工况下原始时频能量故障特征最小值,
c
f
max
表示c工况下原始时频能量故障特征最大值,|
c
f
max
‑
c
f
min
|表示c工况下的归一化尺度;
[0096]
(8)根据获取的水下机器人动态信号,得到当前工况下水下推进器的时频能量故障特征,根据步骤(7)的故障分类模型,对此时水下推进器的故障类型进行诊断。
[0097]
实施例3
[0098]
本实施例中一种基于时频能量的水下推进器故障诊断方法,首先通过采集获取多组水下机器人动态信号,训练得到多组不同工况样本下多组时频能量故障特征,根据有训练样本的工况得到的时频能量故障特征,对无训练样本工况进行时频能量故障特征估计,利用有训练样本工况和无训练样本工况的时频能量故障特征,基于支持向量数据描述算法建立水下推进器故障分类模型,具体包括以下步骤:
[0099]
(11)得到多组有训练样本工况下的时频能量故障特征,包括工况c1和工况c2;
[0100]
(12)估计无训练样本工况下的时频能量故障特征最大值:
[0101][0102]
其中,c1、c2表示有训练样本的某一工况,c
u
表示无训练样本的某一工况,表示c1工况下原始时频能量故障特征最大值,表示c2工况下原始时频能量故障特征最大值,表示c
u
工况下原始时频能量故障特征最大值;
[0103]
(13)估计无训练样本工况下的归一化尺度:
[0104][0105]
其中,表示c1工况下的归一化尺度,表示c2工况下的归一化尺度,表示c
u
工况下的归一化尺度;
[0106]
(14)估计无训练样本工况下的时频能量故障特征最小值:
[0107][0108]
(15)对多组有训练样本工况及无训练样本工况的时频能量故障特征进行归一化处理,利用归一化后的时频能量故障特征基于水下推进器故障分类模型迁移学习,建立水下推进器新故障分类模型;通过一系列归一化处理,将不同工况下的故障样本映射到同一变化尺度空间,从而减小不同工况下的故障样本分布差异,完成故障特征分布适配,进而提高故障分类模型在无训练样本工况下的分类精度;
[0109]
(16)根据获取的水下机器人动态信号,得到当前工况下水下推进器的时频能量故障特征,根据步骤(15)的新故障分类模型,对此时水下推进器的故障类型进行诊断;
[0110]
本实施例中实验设定水下机器人以0.3m/s的纵向目标速度航行,在第250个时间节拍处,推进器出现故障,直到实验结束。水下推进器故障程度分别设定为:0%、10%、20%、30%、40%。如图2(a)所示,采集和记录实验过程中各故障程度下推进器控制电压变化率信号,和图2(b)所示,采集和记录实验过程中各故障程度下水下机器人纵向速度信号,采样频率为5hz。
[0111]
在采集的推进器控制电压变化率信号和水下机器人纵向速度信号中,选择时间长度为l1=400的时间窗,截取图2(a)和图2(b)中时间节拍101~500的信号,采用平滑伪维格纳
‑
威利分布算法求取信号的时频功率谱,如图3所示,截取图2(b)中时间节拍101~500的水下机器人纵向速度信号,得到水下机器人纵向速度信号的时频功率谱。如图3(a)所示,在水下机器人以0.3m/s的纵向目标速度航行,且故障程度为0%时,即推进器正常工作时,水下机器人纵向速度信号的时频功率谱分布相对均匀。如图3(b)~(e)所示,水下机器人以0.3m/s的纵向目标速度航行,故障程度分别为10%、20%、30%、40%,由图3(b)~(e)椭圆框标示内容所示,推进器故障在时频功率谱中引起能量集中,且故障程度越大,能量集中越严重。
[0112]
如图4所示,根据不同故障程度下水下机器人纵向速度信号的时频功率谱,得到对应的瞬时功率曲线。如图4(a)所示,故障程度为10%时,在时间节拍283处,瞬时功率曲线的最小值是4.982;在时间节拍226处,为曲线最小值点左侧相邻极大值5.311;在时间节拍332处,为最小值点右侧相邻极大值5.366。因此,故障能量区域的时域边界判定为[226 332]。类似地,如图4(b)~(d)所示,故障程度分别为20%、30%、40%时,故障能量区域的时域边界分别判定为[174 314]、[211 337]和[192 387]。根据故障能量区域的时域边界的判定结果,对不同故障程度下的时频功率谱进行时域边界划分。如图5所示,为划分时域边界后的时频功率谱,图中两条黑色垂直线为时域边界,此时,故障能量区域被时域边界紧密包围,可见识别的故障能量区域时域边界准确度高。
[0113]
如图6所示,根据时频功率谱中故障能量区域时域边界划分结果,计算时频功率谱中时域边界内、外能量差曲线。如图6(a)所示,故障程度为10%时,在频率为0.088处,能量差曲线的最大值为
‑
0.0002;在频率为0.034处,为最大值左侧相邻局部能量差极小值,极小值为
‑
0.0009。因此,故障能量区域的频域边界判定为[0.034 0.088]。类似地,如图6(b)~(d)所示,故障程度分别为20%、30%、40%时,故障能量区域的频域边界分别判定为[0.024 0.107]、[0.005 0.078]和[0.005 0.083]。根据故障能量区域的频域边界的判定结果,对不同故障程度下的时频功率谱进行频域边界划分。如图7所示,为划分时域边界和频域边界后的时频功率谱,图中,两条黑色水平直线为频域边界,此时,故障能量区域被频域边界紧密包围,可见识别的故障能量区域频域边界准确度高。
[0114]
根据图7所示时频功率谱的故障能量区域边界划分,计算被时域边界、频域边界包围的故障能量区域的时频功率谱的和,将计算结果作为推进器故障的时频能量故障特征。对水下机器人纵向速度信号进行时频能量故障特征提取,如图8所示,对应于故障程度0%、10%、20%、30%、40%,时频能量故障特征值分别为0.0012、0.0030、0.0059、0.0122、0.0213,由此可见,故障特征值随着故障程度的增加而单调增加。对推进器控制电压变化率
信号中进行时频能量故障特征提取,如图9所示,对应于故障程度0%、10%、20%、30%、40%,时频能量故障特征值分别为0.0110、0.0143、0.0169、0.0485、0.1037,由此可见,故障特征值随着故障程度的增加而单调增加。
[0115]
采用长度为l1=400的时间窗口实验数据,并将时间窗逐步向右移动100个时间节拍,得到100(时间节拍数量)
×
5(故障程度种类)
×
2(信号种类)组样本数据。并采用上述步骤同样的方式,在此不再赘述,获取水下机器人纵向目标速度为0.4m/s和0.5m/s时的样本数据,同样从样本数据中提取时频能量故障特征,结果如图10所示。
[0116]
如图10所示,故障程度由0%增大到40%,此时纵向目标速度信号故障特征值在0.3m/s工况下为0.00003~0.02197,0.4m/s工况下为0.00052~0.04416,0.5m/s工况下为0.00056~0.05628;类似的,此时推进器控制电压变化率信号故障特征值在0.3m/s工况下为0.00479~0.10850,0.4m/s工况下为0.00583~0.20560,0.5m/s工况下为0.00096~0.31240,由此可见在相同工况下,不同故障特征的分布范围不同,且不同工况下故障样本分布存在差异。
[0117]
如图11所示,在纵向目标速度为0.3m/s工况下,采用该工况下的归一化尺度对该工况下的每一种时频故障特征进行归一化处理,由图可知,0.3m/s工况下不同类型时频故障特征具有相同的范围,变化范围均为0~1。类似的,将纵向目标速度为0.4m/s工况下的每一种时频故障特征进行归一化处理,纵向目标速度为0.3m/s、0.4m/s工况下,每一种时频故障特征进行归一化处理后的结果如图12所示,图12中,每种工况下的每一种故障特征的变化范围均为0~1,使得不同工况下的故障样本分布差异减小。
[0118]
假设纵向目标速度0.3m/s、0.4m/s工况下的训练样本是已知的,纵向目标速度0.5m/s工况下的训练样本是未知的,即假设0.5m/s工况为无训练样本工况。通过纵向目标速度0.3m/s、0.4m/s工况下的时频故障特征预估得到0.5m/s工况下的时频故障特征,并将预估的时频故障特征进行归一化处理,如图13所示。将0.3m/s、0.4m/s工况下归一化后的时频故障特征及0.5m/s工况下归一化后预估的时频故障特征训练,并基于实施例2中的水下推进器故障分类模型迁移学习建立新故障分类模型。
[0119]
对上述新故障分类模型与现有技术中支持向量域描述方法得到的故障分类模型进行对比实验,实验中设置(a)0.2m/s、(b)0.3m/s、(c)0.4m/s和(d)0.5m/s这四种工况,同时,在每种工况下,对应着0%、10%、20%、30%和40%五种故障程度。构造故障样本集,如表1所示。
[0120]
表1不同工况下的故障样本数量
[0121]
[0122]
采用现有技术中支持向量域描述方法和本实施例中对无训练样本工况进行估计后再进行故障分类模型训练与测试,结果如表2所示。
[0123]
表2不同诊断方法的分类精度对比
[0124][0125]
在案例“a
→
b”中,a为源域,即a的训练样本是已知的,且充足的,b为目标域,即b的训练样本是未知的,b为无训练样本工况,将在工况a下建立的故障分类模型迁移到工况b,对工况b下的测试样本进行分类。现有技术中支持向量数据描述方法的分类精度为28.4%,本实施例中的分类精度为65.2%(c)、63.2%(d),其中,括号中的c表示工况c下的归一化尺度是已知的,括号中的d表示工况d下的归一化尺度是已知的。在案例“b
→
a”、“a
→
c”、“c
→
a”、“a
→
d”、“d
→
a”、“b
→
c”、“c
→
b”、“b
→
d”、“d
→
b”、“c
→
d”、“d
→
c”中,故障分类结果与案例“a
→
b”的结果相类似,即本实施例中的分类精度明显高于现有技术支持向量数据描述方法的分类精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1