一种提高机器人进入充电桩效率的方法及系统与流程
1.本发明涉及一种提高机器人进入充电桩效率的方法及系统,属于机器人设计技术领域。
背景技术:
2.机器人在进入充电桩的时候,有时候会定位偏移无法直着进去充电桩,此时我们就需要在回家的点位上进行调整好角度、方向,然后再继续向前进入充电桩。
3.现有技术所说是直接到达入桩的点,没有考虑到由于外界环境因素障碍物、机器人本身速度等因素导致机器人到达该位置时有可能出现的定位偏移或者机器人雷达扫不到充电桩等。
技术实现要素:
4.本发明的目的在于,克服现有技术存在的技术缺陷,解决上述技术问题,提出一种提高机器人进入充电桩效率的方法及系统,本发明可以提高机器人进入充电桩的稳定性,成功率,将失败的风险降低。
5.本发明具体采用如下技术方案:一种提高机器人进入充电桩效率的方法,由充电桩执行,包括如下步骤:设置预备入桩点信息、正式入桩点信息;响应于机器人发送的预备入桩请求,发送预备入桩点信息给机器人;接收机器人反馈的到达预备入桩点的完成信息,响应于机器人发送的正式入桩请求,发送正式入桩点信息给机器人;接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人。
6.本发明还提出一种提高机器人进入充电桩效率的方法,由机器人执行,包括如下步骤:设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;向充电桩反馈到达预备入桩点的完成信息;向充电桩发送正式入桩请求,接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操作;向充电桩发送“入桩成功”信息,接收充电桩发送的“入桩完成”命令。
7.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
8.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
9.本发明还提出一种提高机器人进入充电桩效率的方法,包括如下步骤:
10.步骤ss1:充电桩执行设置预备入桩点信息、正式入桩点信息;充电桩响应机器人发送的预备入桩请求,充电桩发送预备入桩点信息给机器人;机器人设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;
11.步骤ss2:机器人向充电桩反馈到达预备入桩点的完成信息,充电桩接收机器人反馈的到达预备入桩点的完成信息,充电桩响应机器人发送的正式入桩请求,发送正式入桩点信息给机器人;机器人接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操
作;
12.步骤ss3:机器人向充电桩发送“入桩成功”信息,充电桩接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人。
13.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
14.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
15.本发明还提出一种提高机器人进入充电桩效率的系统,包括:
16.充电桩,具体执行:设置预备入桩点信息、正式入桩点信息;响应于机器人发送的预备入桩请求,发送预备入桩点信息给机器人;接收机器人反馈的到达预备入桩点的完成信息,响应于机器人发送的正式入桩请求,发送正式入桩点信息给机器人;接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人;
17.机器人,具体执行:设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;向充电桩反馈到达预备入桩点的完成信息;向充电桩发送正式入桩请求,接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操作;向充电桩发送“入桩成功”信息,接收充电桩发送的“入桩完成”命令。
18.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
19.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
20.本发明所达到的有益效果:本发明针对如何解决现有技术所说是直接到达入桩的点,没有考虑到由于外界环境因素障碍物、机器人本身速度等因素导致机器人到达该位置时有可能出现的定位偏移或者机器人雷达扫不到充电桩的技术缺陷,通过充电桩执行设置预备入桩点信息、正式入桩点信息;充电桩响应机器人发送的预备入桩请求,充电桩发送预备入桩点信息给机器人;机器人设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;机器人向充电桩反馈到达预备入桩点的完成信息,充电桩接收机器人反馈的到达预备入桩点的完成信息,充电桩响应机器人发送的正式入桩请求,发送正式入桩点信息给机器人;机器人接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操作;机器人向充电桩发送“入桩成功”信息,充电桩接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人,本发明在正式入桩点之前增加了一个预备入桩点,用于进行速度调整,进行机器人的朝向调整,进行是否有障碍物检测,为正式入桩做好准备工作,提高入桩的稳定性和成功率,从整体上解决了现有技术所说是直接到达入桩的点,没有考虑到由于外界环境因素障碍物、机器人本身速度等因素导致机器人到达该位置时有可能出现的定位偏移或者机器人雷达扫不到充电桩的技术缺陷。
附图说明
21.图1是本发明的一种提高机器人进入充电桩效率的方法的应用场景拓扑示意图。
具体实施方式
22.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
23.实施例1:如图1所示,本发明提出一种提高机器人进入充电桩效率的方法,由充电桩执行,包括如下步骤:设置预备入桩点信息、正式入桩点信息;响应于机器人发送的预备入桩请求,发送预备入桩点信息给机器人;接收机器人反馈的到达预备入桩点的完成信息,响应于机器人发送的正式入桩请求,发送正式入桩点信息给机器人;接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人。
24.实施例2:本发明还提出一种提高机器人进入充电桩效率的方法,由机器人执行,包括如下步骤:设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;向充电桩反馈到达预备入桩点的完成信息;向充电桩发送正式入桩请求,接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操作;向充电桩发送“入桩成功”信息,接收充电桩发送的“入桩完成”命令。
25.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
26.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
27.实施例3:本发明还提出一种提高机器人进入充电桩效率的方法,包括如下步骤:
28.步骤ss1:充电桩执行设置预备入桩点信息、正式入桩点信息;充电桩响应机器人发送的预备入桩请求,充电桩发送预备入桩点信息给机器人;机器人设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;
29.步骤ss2:机器人向充电桩反馈到达预备入桩点的完成信息,充电桩接收机器人反馈的到达预备入桩点的完成信息,充电桩响应机器人发送的正式入桩请求,发送正式入桩点信息给机器人;机器人接收充电桩返回的正式入桩点信息,开始执行去往正式入桩点操作;
30.步骤ss3:机器人向充电桩发送“入桩成功”信息,充电桩接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人。
31.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
32.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
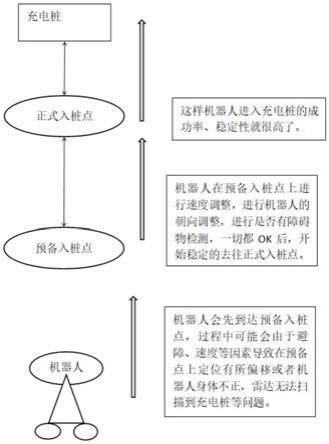
33.实施例4:本发明还提出一种提高机器人进入充电桩效率的系统,包括:
34.充电桩,具体执行:设置预备入桩点信息、正式入桩点信息;响应于机器人发送的预备入桩请求,发送预备入桩点信息给机器人;接收机器人反馈的到达预备入桩点的完成信息,响应于机器人发送的正式入桩请求,发送正式入桩点信息给机器人;接收机器人发送的“入桩成功”信息,生成“入桩完成”命令反馈给机器人;
35.机器人,具体执行:设置进入入桩状态,向充电桩发送预备入桩请求,接收充电桩发送的预备入桩点信息,执行去往预备入桩点操作;向充电桩反馈到达预备入桩点的完成信息;向充电桩发送正式入桩请求,接收充电桩返回的正式入桩点信息,开始执行去往正式
入桩点操作;向充电桩发送“入桩成功”信息,接收充电桩发送的“入桩完成”命令。
36.作为一种较佳的实施例,所述机器人在预备入桩点上执行姿态调整,执行完毕之后再向充电桩发送正式入桩请求。
37.作为一种较佳的实施例,所述姿态调整包括:速度调整、机器人的朝向调整、是否有障碍物检测操作。
38.需要说明的是:本发明的机器人会先到达预备入桩点,在过程中可能会由于避障、速度等因素导致在预备入桩点上定位有所偏移或者机器人身体不正、雷达无法扫描到充电桩等问题;机器人在预备入桩点上进行速度调整,进行机器人的朝向调整,进行是否有障碍物检测,一切都ok后,开始稳定的去往正式入桩点,这样机器人进入充电桩的成功率、稳定性、进入效率就很高了。
39.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1