一种基于无人艇姿态主动反馈的无人机自主着舰方法
1.本发明涉及无人机自主降落技术领域,具体涉及一种基于无人艇姿态主动反馈的无人机自主着舰方法。
背景技术:
2.随着中国海洋强国战略的推进实施,构建遥感卫星、无人机、无人艇、海面站、岸基站一体的海洋立体生态监控网络体系是推进我国海洋生态文明建设、保护海洋环境所急需的关键技术。特别是随着我国无人机技术的迅速发展,基于无人机的近岸海域绿潮、赤潮等生态灾害的实时监测技术已经成为海洋科学领域的研究热点。然而,目前无人机受限于持续续航能力不足,导致岸基起飞覆盖监测面积受限,限制了无人机在海洋环境监测领域的深度应用。开展无人机自主着舰技术的研究是拓展基于无人机的海洋藻类灾害监测范围、保障无人机飞行安全、甚至实现无人机着舰电力自动补充的核心技术之一。
3.现有的无人机自主降落技术中,没有能够在随海浪运动的无人艇上进行自主降落的方法,相对于平坦的地面来说,位于海面上的船舶会随着波浪进行起伏运动,大型固定翼无人机若想要降落在船上则需要一定的设备进行拦阻,而较小的固定翼无人机在降落时甚至需要冒险用手辅助无人机进行着陆,对于自主着陆目前已有方案多是在无人艇上安装辅助降落装置挂接在无人机机身上使之稳定,但是实际操作的安全系数较低,容易对无人机造成损坏甚至坠毁。这些问题是目前无人机还无法较好地实现与无人艇进行全自动地协同自主作业的主要原因。
技术实现要素:
4.针对上述的问题,本发明提供了一种基于无人艇姿态主动反馈的无人机自主着舰方法,使无人机以更高的安全系数进行自主着舰。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于无人艇姿态主动反馈的无人机自主着舰方法,包括以下步骤:
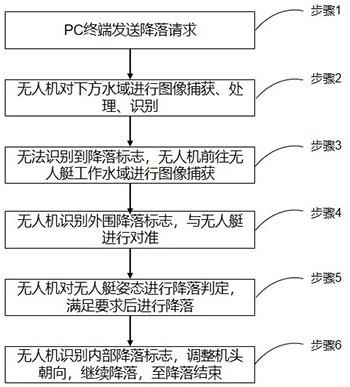
7.步骤1,pc端连接lora数传电台,通过mission planner地面站向无人机发送降落指令;
8.步骤2,无人机启动机载单目摄像头,以180度广角和80帧的速度对下方水域进行图像捕获,经图像处理单元处理后传输给图像检测单元进行降落标志的检测识别;
9.步骤3,若无法识别到降落标志,无人艇发送自身当前地理坐标给无人机,无人机通过gps导航单元前往无人艇工作水域并检测识别降落标志;
10.步骤4,通过图像检测单元识别外围降落标志,调整无人机动力输出,使无人机身摄像机的视野中心与外围降落标志中心重合;
11.步骤5,根据无人艇搭载的姿态测量单元所获得的姿态信息,无线传输给无人机的降落决策单元对降落条件进行判定,艇体倾角满足降落阈值,则通过激光测距单元与气压计相结合测距的方法,使无人机从悬停高度5m处下降到1m;
12.步骤6,下降到1m高度后,无人机通过图像检测单元识别内部降落标志,通过颜色识别,无人机自动调整自身朝向与无人艇朝向一致,若此时艇体倾角依旧满足降落条件,则完成降落,否则复飞回到悬停高度。
13.进一步的,步骤3中,无人艇甲板上的降落标志由两部分构成,外围降落标志为外半径50cm,内半径25cm的圆环,内部降落标志为画有垂线的内接正三角形,垂线方向为无人艇朝向,垂线左侧为白色,右侧为黑色。
14.进一步的,步骤2中,图像处理单元包括二值化模块和图像增强模块;二值化处理模块,给图像每个像素点的灰度值与阈值thresh进行比较,若某一像素点的灰度值大于thresh,则将此点的灰度值改为thresh,否则保持原值;计算公式如下:
[0015][0016]
式中,src(x,y)为各个图像的像素点,以图片的左上角为原点,x为图像中像素点的横坐标,y为纵坐标。图像通过均值法和高斯法自适应地计算邻域内的阈值,再进行二值化,避免了由于光照不均匀以及阴影的存在,全局只有一个阈值会使得在阴影处的白色区域也会被二值化成黑色的现象;图像增强模块,采用双边滤波算法增强图像中的有用信息,将原来不清晰的图像变得清晰,扩大图像中不同物体之间的差别,抑制无用物体的特征,减小海面环境对识别的影响。
[0017]
进一步的,步骤2中,图像检测单元包括图形检测模块和三角形检测模块,图形检测模块,采用霍夫变换,将图像空间x-y直角坐标系中的像素投影到参数空间中,从平面坐标系中圆上的点到极坐标转换,(x0,y0,r)中x0,y0是圆心,r取一固定值,θ扫描360度,x y跟着变化,之后寻找是否存在交点,若多个边缘点对应的三维空间曲线交于一点,则他们在共同圆上,在圆心处有累积最大值,通过此方法分别确定外圆与内圆得圆心位置,取二者得中间值作为圆环的圆心,并以这个值为中心进行摄像头视野中心的对准;三角形检测模块,采用canny算法与霍夫变换结合,对于canny算法,首先使用高斯滤波平滑图像,减少图像中噪声;计算图像中每个像素的梯度方向和幅值,通过sobel算子分别检测图像x方向边缘和y方向的边缘,再通过非极大值抑制算法消除边缘检测带来的杂散响应,将某个像素的梯度强度与沿正负梯度方向上的两个像素进行比较,若此像素的梯度强度最大,则该像素点作为边缘点保留,否则被删除,之后使用双阈值法划分强边缘与弱边缘,将边缘处的梯度值与两个阈值比较,若此像素的梯度幅值小于较小阈值则去除,若大于较大阈值则为强边缘,若处于两者之间则为弱边缘,霍夫变换通过将图像中的像素在一个空间坐标系中变换到另一个空间坐标系中,使得在原空间中具有相同特性的曲线或者直线映射到到一个空间中形成峰值,把检测形状转化为统计峰值。
[0018]
进一步的,步骤5中,激光测距单元与无人机自身所带的气压计相结合,由激光发射器向甲板上发射一束短而强的激光脉冲,激光脉冲到达目标后会反射回一部分被光功能接收器接收,激光脉冲往返的时间间隔是t,光速为c,无人机与无人艇之间的距离为tc/2。气压计根据海拔不同气压不同的原理,得到当前的海拔高度,将激光测距单元测得的距离和气压计测得的高度进行平均取值作为无人机实际高度,当此高度小于无人机支架0.2m时,关闭无人机动力系统;
[0019]
进一步的,步骤5中,降落决策单元控制无人机进行降落的时机,对于不同的无人机与无人艇降落系统,存在一个独特的甲板倾角阈值θ,仅当甲板倾角小于阈值时,无人机通过四脚与甲板的摩擦力可以在甲板上稳定,通过实时传输过来的无人艇姿态信息,降落决策模块对无人艇的姿态数据进行判定,满足降落条件时,进行降落操作,若某时刻无人艇的姿态由与海浪的作用产生了较大的波动,甲板倾角超过了安全阈值θ,无人艇接收到此信息后,停止降落,进行悬停,寻找下一个安全降落时机。
[0020]
与现有技术相比,本发明的有益效果如下:
[0021]
1.本发明在降落标志检测识别阶段,采用先处理后检测的方案,通过对捕获到的图像进行二值化以及图像增强的处理,解决了由于光照不均匀全局只有一个阈值会使得在阴影处的白色区域也会被二值化成黑色的现象,同时扩大图像中不同物体之间的差别,抑制无用物体的特征,减小海面环境对识别的影响。
[0022]
2.本发明在外围降落标志检测阶段,采用圆环作为降落标志,通过霍夫变换分别检测到外圆与内圆的圆心,将二者的中间点作为整个圆环的中心,使得无人机对准标志更加得精准。
[0023]
3.本发明在降落决策阶段,采用无人艇姿态主动反馈的方案,通过对无人艇姿态的监测,结合能够满足无人机安全降落的甲板角度,对降落时即进行判定,无人艇姿态倾角小于安全降落角度时,进行降落操作;此方案提高了无人机降落在随海浪自由运动无人艇上的安全性。
[0024]
4.本发明在降落阶段,采用激光测距仪和气压计相结合的方案对无人机距无人艇的高度进行监测,可以提供更有效的高度数据。
附图说明
[0025]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0026]
附图1为基于无人艇姿态主动反馈的无人机自主着舰方法的流程图。
具体实施方式
[0027]
下面将通过具体实施方式对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
本发明基于无人艇姿态主动反馈实现无人机在无人艇上着陆,包括摄像头采集单元,以180度的广角80帧的速度进行图像捕获;图像处理单元,对采集到的图像进行二值化以及图像增强处理;图像检测单元,对外围降落降落标志圆环和内部降落标志正三角形进行检测,通过外围降落标志调整无人机的位置与降落地点对准,通过内部降落标志调整无人机的朝向与无人艇一致;gps导航单元,无人机收到无人艇的经纬度信息后,前往此目标地点;姿态测量单元,通过六轴陀螺仪监测无人艇姿态;激光测距单元,对无人机和无人艇
之间的距离进行监控,当两者之间的距离小于无人机的起落架高度0.2m时,停止无人机的动力输出,完成降落。
[0029]
本实施例,基于无人艇姿态主动反馈的无人机自主着舰的方法,包括以下步骤:
[0030]
步骤1:无人机与pc端均连接着lora数传电台,由pc端使用地面站mission planner通过lora远距离无线通信向无人机发送降落指令,无人机停止当前工作状态;
[0031]
步骤2:无人机搭载着一个单目摄像头,收到降落信息后,此单目摄像头以180度广角、80帧的速度对无人机下方水域进行图像捕获,经图像处理单元处理后传输给图像检测单元进行降落标志的检测识别;其中图像处理单元采用树莓派opencv环境,将摄像头采集到的图像进行二值化以及图像增强处理后在进行降落标志的检测识别;图像处理单元包括二值化模块和图像增强模块;二值化处理模块,给图像每个像素点的灰度值与阈值thresh进行比较,若某一像素点的灰度值大于thresh,则将此点的灰度值改为thresh,否则保持原值;计算公式如下:
[0032][0033]
式中,src(x,y)为各个图像的像素点,以图片的左上角为原点,x为图像中像素点的横坐标,y为纵坐标,图像通过均值法和高斯法自适应地计算邻域内的阈值,再进行二值化,避免了由于光照不均匀以及阴影的存在,全局只有一个阈值会使得在阴影处的白色区域也会被二值化成黑色的现象;图像增强模块,采用双边滤波算法增强图像中的有用信息,将原来不清晰的图像变得清晰,扩大图像中不同物体之间的差别,抑制无用物体的特征,减小海面环境对识别的影响,
[0034]
进一步的,图像检测单元包括图形检测模块和三角形检测模块,图形检测模块,采用霍夫变换,将图像空间x-y直角坐标系中的像素投影到参数空间中,从平面坐标系中圆上的点到极坐标转换,(x0,y0,r)中x0,y0是圆心,r取一固定值,θ扫描360度,x y跟着变化,之后寻找是否存在交点,若多个边缘点对应的三维空间曲线交于一点,则他们在共同圆上,在圆心处有累积最大值,通过此方法分别确定外圆与内圆得圆心位置,取二者得中间值作为圆环的圆心,并以这个值为中心进行摄像头视野中心的对准;三角形检测模块,采用canny算法与霍夫变换结合,对于canny算法,首先使用高斯滤波平滑图像,减少图像中噪声;计算图像中每个像素的梯度方向和幅值,通过sobel算子分别检测图像x方向边缘和y方向的边缘,再通过非极大值抑制算法消除边缘检测带来的杂散响应,将某个像素的梯度强度与沿正负梯度方向上的两个像素进行比较,若此像素的梯度强度最大,则该像素点作为边缘点保留,否则被删除,之后使用双阈值法划分强边缘与弱边缘,将边缘处的梯度值与两个阈值比较,若此像素的梯度幅值小于较小阈值则去除,若大于较大阈值则为强边缘,若处于两者之间则为弱边缘,霍夫变换通过将图像中的像素在一个空间坐标系中变换到另一个空间坐标系中,使得在原空间中具有相同特性的曲线或者直线映射到到一个空间中形成峰值,把检测形状转化为统计峰值。
[0035]
步骤3:若无法识别到降落标志,则说明无人机没有在无人艇工作水域,无人艇通过差分gps定位发送自身当前地理坐标给无人机,无人机通过gps导航单元前往无人艇工作水域并检测识别降落标志;
[0036]
步骤4:通过图像检测单元识别外围降落标志,即外半径为50cm,内半径为25cm的圆环,外环用黑色填充,内环用白色填充,通过在opencv中使用霍夫变换,确定外圆与内圆圆心的位置,取二者的中间值作为外围降落标志的中心,调整无人机动力输出,使无人机身摄像机的视野中心与外围降落标志重合,无人艇随海浪进行漂移,无人机通过此方案始终与无人艇进行对准;无人艇甲板上的降落标志由两部分构成,外围降落标志为外半径50cm,内半径25cm的圆环,内部降落标志为画有垂线的内接正三角形,垂线方向为无人艇朝向,垂线左侧为白色,右侧为黑色;
[0037]
步骤5:根据无人艇搭载的姿态测量单元所获得的姿态信息,无线传输给无人机的降落决策单元对降落条件进行判定,当艇体倾角满足降落阈值θ时,进行降落操作,超过此阈值,无人机会从无人艇甲板上滑落,无法完成安全降落;激光测距单元通过对激光发射到返回接收时间的计算,得到无人机与无人艇之间的距离,结合无人机自身所带的气压计所测量的高度,取二者的平均值作为实际高度值,控制无人机从悬停高度5m处下降到1m;激光测距单元与无人机自身所带的气压计相结合,由激光发射器向甲板上发射一束短而强的激光脉冲,激光脉冲到达目标后会反射回一部分被光功能接收器接收,激光脉冲往返的时间间隔是t,光速为c,无人机与无人艇之间的距离为tc/2;气压计根据海拔不同气压不同的原理,得到当前的海拔高度,将激光测距单元测得的距离和气压计测得的高度进行平均取值作为无人机实际高度,当此高度小于无人机支架0.2m时,关闭无人机动力系统;无人艇降落甲板上搭载姿态测量单元,用于实时检测降落地点的姿态状况;降落决策单元控制无人机进行降落的时机,对于不同的无人机与无人艇降落系统,存在一个独特的甲板倾角阈值θ,仅当甲板倾角小于阈值时,无人机通过四脚与甲板的摩擦力可以在甲板上稳定,通过实时传输过来的无人艇姿态信息,降落决策模块对无人艇的姿态数据进行判定,满足降落条件时,进行降落操作,若某时刻无人艇的姿态由与海浪的作用产生了较大的波动,甲板倾角超过了安全阈值θ,无人艇接收到此信息后,停止降落,进行悬停,寻找下一个安全降落时机;
[0038]
步骤6:下降到1m高度后,无人机通过图像检测单元识别内部降落标志即一内接三角形,垂线左侧为白色,右侧为黑色,通过颜色识别,无人机自动调整自身朝向与无人艇朝向一致,若此时艇体倾角依旧满足降落条件,则完成降落,否则复飞回到悬停高度。
[0039]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明装置权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1