巡检机器人的定位装置、巡检机器人及巡检系统的制作方法
1.本技术实施例涉及机械设备技术领域,尤其涉及一种巡检机器人的定位装置、巡检机器人及巡检系统。
背景技术:
2.巡检机器人用于在工作场所中进行巡逻和检查,以及时发现异常和安全隐患,从而保证工作场所的安全性。例如,通过巡检机器人上搭载的摄像头拍摄工作场所某些位置的图像,从而根据图像确定工作场所中是否存在危险、安全隐患或者设备是否处于正常运行状态等。基于巡检机器人安装和使用方式的不同,巡检机器人可以分为轨道式巡检机器人、行走式巡检机器人和头戴式巡检机器人等。对于轨道式巡检机器人而言其需要一个专用的轨道,以支撑巡检机器人并供巡检机器人移动。
3.现有的轨道式巡检机器人为了能够进行里程计数,从而确定轨道式巡检机器人是否到达了需要的位置。现有的里程计数方式通常是根据设置在轨道式巡检机器人内的计数器检测巡检机器人的驱动轮的转动圈数,再结合驱动轮的周长计算出轨道式巡检机器人移动的距离,进而确定其位置。这种方式的问题在于,在轨道式巡检机器人出现打滑等情况时,轨道式巡检机器人实际上移动了一段距离,但是由于驱动轮没有转动,导致计数的移动距离和实际的移动距离不一致,造成轨道式巡检机器人的定位不准确,影响了巡检效果。
技术实现要素:
4.有鉴于此,本技术实施例提供一种巡检机器人的定位装置、巡检机器人及巡检系统方案,以至少部分解决上述问题。
5.根据本技术实施例,提供了一种巡检机器人的定位装置,其包括无线信息采集器和标识器,无线信息采集器设置在巡检机器人和轨道中的一个上,标识器设置在巡检机器人和轨道中的另一个上,且无线信息采集器和标识器可相对移动,标识器中配置有唯一标识信息,在标识器处于无线信息采集器的识别范围内时,无线信息采集器从标识器中读取唯一标识信息,以根据唯一标识信息确定巡检机器人在轨道上的位置。
6.可选地,无线信息采集器设置在巡检机器人上,并可随巡检机器人在轨道上移动,轨道上设置有多个标识器,相邻两个标识器之间具有间距。
7.可选地,标识器包括射频识别标签,各射频识别标签内配置有与标识器对应的唯一编号作为唯一标识信息,无线信息采集器包括用于读取射频识别标签的射频读取器。
8.根据本技术的另一方面,提供一种巡检机器人,其包括机器人主体和上述的定位装置,定位装置的无线信息采集器或者标识器设置于机器人主体。
9.可选地,机器人主体包括第一嵌入式处理器,无线信息采集器设置于机器人主体,且与第一嵌入式处理器数据连接,无线信息采集器将读取到的标识器的唯一标识信息发送至第一嵌入式处理器,第一嵌入式处理器基于预制的唯一标识信息与位置对应关系,确定巡检机器人的位置。
10.可选地,机器人主体还包括工控机,第一嵌入式处理器与工控机数据连接,并将确定的位置传输至工控机。
11.可选地,巡检机器人还包括前侧超声波避障传感器,前侧超声波避障传感器安装于机器人主体的行走方向上的前侧,前侧超声波避障传感器与第一嵌入式处理器连接,并将超声波检测数据发送至第一嵌入式处理器,第一嵌入式处理器根据超声波检测数据确定巡检机器人的前方是否存在障碍物。
12.可选地,机器人主体还包括后侧超声波避障传感器,后侧超声波避障传感器安装于机器人主体的行走方向上的后侧,后侧超声波避障传感器与第一嵌入式处理器连接,并将超声波检测数据发送至第一嵌入式处理器,第一嵌入式处理器根据超声波检测数据确定巡检机器人的后方是否存在障碍物。
13.可选地,机器人主体还包括第二嵌入式处理器和与第二嵌入式处理器连接的巡检传感器,巡检传感器将检测获得的巡检环境数据发送至第二嵌入式处理器。
14.根据本技术的另一方面,提供一种巡检系统,其包括:轨道、和上述巡检机器人,巡检机器人可移动地设置于轨道。
15.本技术的定位装置包括无线信息采集器和标识器,标识器中配置有唯一标识信息,以使得不同的标识器之间能够相互区分,从而使得标识器与巡检机器人移动的位置之间产生对应关系,这样无线信息采集器可以读取标识器内的唯一标识信息,后续可以根据该唯一标识信息确定巡检机器人在轨道上的实际位置,由此提升了对巡检机器人定位的准确性,解决由于巡检机器人的驱动轮打滑等情况导致的定位不准确的问题。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
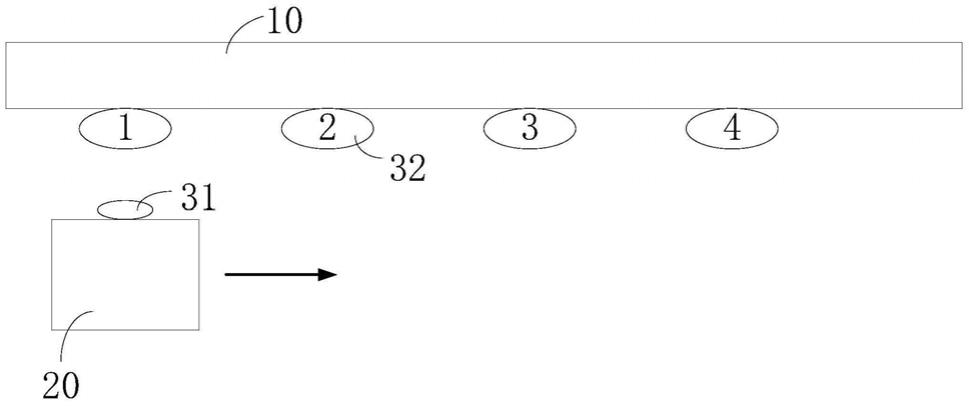
17.图1为本技术实施例的巡检机器人的定位装置与轨道以及巡检机器人配合的示意图;
18.图2为本技术实施例的巡检机器人的机器主体的连接关系示意图。
19.附图标记:
20.10、轨道;20、机器人主体;21、第一嵌入式处理器;22、工控机;23、前侧超声波避障传感器;24、第二嵌入式处理器;251、对讲机;252、电池控制器;253、驱动器;254、气体探头;255、可调谐半导体激光吸收光谱传感器;256、相机;257、云台;258、wifi单元;259、交换机;261、红外传感器;262、电源;31、无线信息采集器;32、标识器。
具体实施方式
21.为了使本领域的人员更好地理解本技术实施例中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本技术实施例保护的范围。
22.如图1和图2所示,巡检机器人的轨道10可以固定在固定物(如屋顶、墙壁或者其他吊装轨道10的立杆)上。巡检机器人可移动地设置在轨道10上,并沿着轨道10在巡检环境中移动,从而采集巡检环境中需要的巡检环境数据,以根据巡检环境数据确定巡检环境的安全性。
23.在本实施例中,提供一种巡检机器人的定位装置,该定位装置包括无线信息采集器31和标识器32,无线信息采集器31设置在巡检机器人和轨道10中的一个上,标识器32设置在巡检机器人和轨道10中的另一个上,且无线信息采集器31和标识器32可相对移动,标识器32中配置有唯一标识信息,在标识器32处于无线信息采集器31的识别范围内时,无线信息采集器31从标识器32中读取唯一标识信息,以根据唯一标识信息确定巡检机器人在轨道10上的位置。
24.该定位装置包括无线信息采集器31和标识器32,标识器32中配置有唯一标识信息,以使得不同的标识器32之间能够相互区分,从而使得标识器32与巡检机器人移动的位置之间产生对应关系,这样无线信息采集器31可以读取标识器32内的唯一标识信息,后续可以根据该唯一标识信息确定巡检机器人在轨道10上的实际位置,由此提升了对巡检机器人定位的准确性,解决由于巡检机器人的驱动轮打滑等情况导致的定位不准确的问题。
25.在一种可行方式中,无线信息采集器31为一个,其设置在巡检机器人上,并可随巡检机器人在轨道10上移动,轨道10上设置有多个标识器32,相邻两个标识器32之间具有间距。这样方式使得结构较为简单、占用空间小的标识器32设置在轨道10上,且不需要移动,因此即使标识器32的数量较多,也不会使成本过高,而且标识器32安装方便。
26.无线信息采集器31可以读取标识器32中的唯一标识信息,以及进行一些数据处理,相较于标识器32,无线信息采集器31的结构更加复杂,成本更高,为了降低成本,定位装置包括一个无线信息采集器31,其设置在巡检机器人上,并随巡检机器人移动。
27.为了避免定位装置干涉巡检机器人的正常移动,无线信息采集器31和标识器32之间通过无线方式(如声、光或者电磁信号)进行数据传输。
28.以射频方式为例,标识器32包括射频识别标签(rfid),各射频识别标签内配置有与标识器32对应的唯一编号作为唯一标识信息,无线信息采集器31包括用于读取射频识别标签的射频读取器。当无线信息采集器31移动到某个射频识别标签的下方时,从射频识别标签中读取唯一编号。根据该唯一编号就可以确定巡检机器人在轨道10上的位置,从而实现巡检机器人的准确定位。
29.在另一种可行方式中,标识器32可以是二维码,无线信息采集器31可以是具有二维码识别功能的相机。相机移动到标识器32下方时通过扫描二维码获得其中的唯一编号,从而根据唯一编号确定巡检机器人的位置。
30.当然,在其他实施例中,标识器32可以设置在巡检机器人上并随着巡检机器人移动,在轨道10上设置有多个无线信息采集器31,在标识器32移动到某个无线信息采集器31下方时,被无线信息采集器31采集到唯一标识信息,根据采集到唯一标识信息的无线信息采集器31的位置就可以确定巡检机器人的位置。
31.根据本技术的另一方面,提供一种巡检机器人,该巡检机器人包括机器人主体20和上述的定位装置,定位装置的无线信息采集器31或者标识器32设置于机器人主体20。该巡检机器人采用无线信息采集器31和标识器32进行定位,解决了现有技术中采用计数器检
测驱动轮的转动圈数确定巡检机器人的移动位置存在的驱动轮打滑时定位不准确的问题。除此之外,该定位装置还解决了现有的通过感应线圈确定巡检机器人的位置存在的感应线圈脱落或损坏后无法准确定位的问题。
32.在本实施例中,为了提升巡检机器人的数据处理能力,机器人主体20包括第一嵌入式处理器21,无线信息采集器31设置于机器人主体20,且与第一嵌入式处理器21数据连接,无线信息采集器31将读取到的标识器32的唯一标识信息发送至第一嵌入式处理器21,第一嵌入式处理器21基于预制的唯一标识信息与位置对应关系,确定巡检机器人的位置。
33.第一嵌入式处理器21用于对巡检机器人进行导航控制,为了实现导航控制,第一嵌入式处理器21与无线信息采集器31连接,从而实现对巡检机器人的定位,进而根据定位可以对巡检机器人进行导航控制,如控制巡检机器人的移动或者停止等。
34.以无线信息采集器31为射频读取器为例,第一嵌入式处理器21中预制有唯一标识信息与位置对应关系,该对应关系例如为:射频标签1距离轨道10的起点0m(即位于轨道10的起点处),射频标签2距离轨道10的起点3m,射频标签3距离轨道10的起点6m等等。
35.第一嵌入式处理器21与射频读取器可以通过rs485协议连接,接收射频读取器采集的射频标签中的唯一标识信息,根据该唯一标识信息和预制的对应关系,可以确定巡检机器人距离轨道10的起点的距离,也就确定了巡检机器人在轨道10上的位置。
36.如图2所示,巡检机器人还包括前侧超声波避障传感器23、后侧超声波避障传感器(图中未示出)、电池控制器(bms)252、和驱动器253等。
37.其中,前侧超声波避障传感器23安装于机器人主体20的行走方向上的前侧,前侧超声波避障传感器23与第一嵌入式处理器21连接,并将超声波检测数据发送至第一嵌入式处理器21,第一嵌入式处理器21根据超声波检测数据确定巡检机器人的前方是否存在障碍物。
38.具体地,前侧超声波避障传感器23通过rs485协议与第一嵌入式处理器21连接,从而实现数据传输。前侧超声波避障传感器23可以向外发射超声波,并接收外界物体反射的信号作为超声波检测数据,前侧超声波避障传感器23将超声波检测数据发送至第一嵌入式处理器21。第一嵌入式处理器21根据超声波检测数据确定前方一定距离内是否存在障碍物,若存在障碍物则可以向驱动器发送信号,使驱动器控制电机停止转动,从而防止碰撞到障碍物。
39.可选地,机器人主体20还包括后侧超声波避障传感器,后侧超声波避障传感器安装于机器人主体20的行走方向上的后侧,后侧超声波避障传感器与第一嵌入式处理器21连接,并将超声波检测数据发送至第一嵌入式处理器21,第一嵌入式处理器21根据超声波检测数据确定巡检机器人的后方是否存在障碍物。通过配置前侧超声波避障传感器和后侧超声波避障传感器可以实现前后侧避障,保证了行走的安全性。
40.电池控制器252与第一嵌入式处理器21连接,电池控制器可以检测电池的电量,并将电池的电量输送给第一嵌入式处理器21,以便第一嵌入式处理器21根据电量控制巡检机器人是否移动。
41.可选地,机器人主体20还包括工控机22,第一嵌入式处理器21与工控机22数据连接,并将确定的位置传输至工控机22。工控机22用于处理巡检机器人中较为复杂的业务逻辑,以及处理外部通信。
42.如图2所示,工控机22上设置有网口,通过网口与交换机259的网口连接,从而实现通信。交换机259通过网口与wifi单元258、红外传感器261连接,并实现数据传输。第一嵌入式处理器21通过rs232协议与工控机22连接,并传输数据。
43.工控机22还可以通过usb接口与对讲机251连接,以实现声音的采集和处理。
44.可选地,机器人主体20还包括第二嵌入式处理器24和与第二嵌入式处理器24连接的巡检传感器,巡检传感器将检测获得的巡检环境数据发送至第二嵌入式处理器24。
45.第二嵌入式处理器24用于处理巡检机器人上搭载的巡检传感器获得的巡检环境数据。不同的巡检传感器采集的数据可能不同,根据不同的巡检需求也可以搭载不同的巡检传感器。例如,在本实施例中,巡检机器人包括气体探头254、可调谐半导体激光吸收光谱传感器255(tdlas)、以及高清相机256等。为了保证相机256采集图像的稳定性,巡检机器人还包括云台257,云台257用于承载相机,以减少振动传递到相机256上,从而提升高清相机256采集的图像的清晰度。
46.气体探头254、tdlas传感器和相机256通过rs485协议与第二嵌入式处理器24连接,以实现数据传输。
47.如,气体探头254用于检测巡检环境中一种或多种气体含量作为巡检环境数据,并将巡检环境数据发送给第二嵌入式处理器24内,以使其对数据进行处理,并可以将处理结果通过rs232协议将处理结果发送给工控机22。工控机22可以根据处理结果进行其他处理,或者也可以将处理结果发送给其他设备(如上位机)等。
48.tdlas传感器与第二嵌入式处理器24连接,并将检测到的传感器数据发送给第二嵌入式处理器24,由其进行处理。
49.相机用于采集图像,并将采集的图像发送给第二嵌入式处理器24,第二嵌入式处理器24,由第二嵌入式处理器24对图像进行处理。
50.上述的用电器件可以采用电源262进行供电。
51.根据本技术的另一方面,提供一种巡检系统,其包括:轨道10、以及上述巡检机器人,巡检机器人可移动地设置于轨道10。
52.该巡检系统的轨道10上可以设置多个标识器32,标识器32可以射频标签,每个射频标签均具有唯一标识信息。通过在巡检机器人中增加第一嵌入式处理器21,使得巡检机器人能够对唯一标识信息进行处理,从而实现当巡检机器人上的无线信息采集器31移动到某个标识器32对应的位置处时,可以读取标识器32中的唯一标识信息,进而根据唯一信息标识就可以确定巡检机器人在轨道上的位置。
53.这种定位方式解决了现有的采用plc进行控制的巡检机器人使用接近开关和计数器进行定位时存在的若驱动轮打滑使得计数器计数计算出的位置与接近开关检测出的位置不一致时无法确定真实位置的问题。
54.此外,在标识器32意外脱落或者无法使用时这种定位方式也不会受到影响,可以准确地进行定位,即便出现驱动轮打滑的情况也不会产生定位错误。而且,若需要增加新的定位点,则可以在轨道10上增加一个新的标识器32,并在标识器32中写入唯一标识信息,并预设该唯一标识信息与位置的对应关系,这样就可以方便地增加新的定位点,不需要对定位逻辑进行任何调整,节省了增加新定位点的成本。
55.以上实施方式仅用于说明本技术实施例,而并非对本技术实施例的限制,有关技
术领域的普通技术人员,在不脱离本技术实施例的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本技术实施例的范畴,本技术实施例的专利保护范围应由权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1