补偿控制方法、系统及设备与流程
1.本发明涉及计算机技术领域,特别涉及补偿控制方法、系统及设备。
背景技术:
2.很多设备(例如全液压操作机,锻压机组电气系统,机械手)上会使用液压阀驱动油缸的活塞进行位移。传统的液压阀控制依赖于pid(比例积分微分控制)系统和位移传感器进行,其原理是:由位移传感器采集活塞的实际位移值,pid系统根据位移传感器所采集的设定位移值和实际位移值间的差值,计算得到速度值,并根据液压特性曲线(竖轴为速度值,横轴为电压值)向液压阀输出相应的控制电压,控制液压阀驱动油缸活塞以相应的速度运动。
3.发明人发现,pid系统所使用的液压特性曲线是线性的,而实际上,液压阀具有非线性的液压特性,按照传统pid控制,存在运动过程中活塞定位不准确的问题。
技术实现要素:
4.有鉴于此,本发明实施例提供补偿控制方法与系统,以提高定位精度。
5.为实现上述目的,本发明实施例提供如下技术方案:
6.一种补偿控制方法,应用于补偿控制系统,所述补偿控制系统包括比例积分微分控制系统、补偿单元和位移传感器;所述pid控制系统包括:控制器和标准化单元;所述补偿单元维护有针对预设的液压线性特性曲线的特性补偿信息;
7.所述方法包括:
8.所述控制器根据实际位移值和设定位移值的差值,向所述标准化单元输出速度值;其中,所述实际位移值由所述位移传感器采集的、由液压阀驱动的油缸活塞的位移值;
9.所述标准化单元根据预设的液压线性特性曲线和获取的速度值,输出第一电压值;
10.所述补偿单元根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值;
11.所述补偿单元基于所述目标补偿值对所述电压值进行补偿处理,得到第二电压值并输出至所述液压阀;所述液压阀用于根据所述第二电压值驱动油缸活塞以相应的速度运动。
12.可选的,所述补偿单元维护有多种类型的液压阀所对应的特性补偿信息;在所述补偿单元根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值之前,还包括:所述补偿单元获取液压阀的类型,并根据所获取类型确定所使用的特性补偿信息。
13.可选的,所述特性补偿信息包括:第一标定表或第二标定表;所述第一标定表包括:各速度典型值与相对应的标定补偿值;所述第二标定表包括:各电压典型值与相对应的标定补偿值;所述根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值包括:在所述第一标定表中查找与所述控制器输出的速度值对应的速度典型值;将查找到的速度
典型值所对应的标定补偿值,确定为所述目标补偿值;或者,在所述第二标定表中查找与所述第一电压值对应的电压典型值;将查找到的电压典型值所对应的标定补偿值,确定为所述目标补偿值。
14.可选的,在所述补偿单元根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值之前,还包括:确定预设电压值为起始电压值;向液压阀输入所述起始电压值,并以预设步长逐步增大或减少所输入的电压值;所述起始电压值,以及,以预设步长逐步增大或减少的每一电压值均为电压典型值;获取所述液压阀在各电压典型值下,驱动油缸活塞运动的速度值;根据所获取的各速度值,确定速度典型值;使用所述速度典型值所对应的电压典型值,以及所述速度典型值在液压线性特性曲线中所对应的电压值,计算标定补偿值。
15.可选的,所述特性补偿信息包括:表征速度值与补偿值的对应关系的第一特性补偿曲线函数;或者,表征电压值与补偿值的对应关系的第二特性补偿曲线函数;所述根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值包括:将所述控制器输出的速度值作为自变量输入所述第一特性曲线函数,所述第一特性曲线函数输出的因变量的具体取值为所述目标补偿值;或者,将所述第一电压值作为自变量输入所述第二特性曲线函数,所述第二特性曲线函数输出的因变量的具体取值为所述目标补偿值。
16.可选的,所述标准化单元维护有多种类型的液压阀所对应的液压线性特性曲线;
17.在所述标准化单元根据所述预设液压线性特性曲线和获取的速度值,输出第一电压值之前,还包括:
18.所述标准化单元获取液压阀的类型,并根据所获取类型确定所使用的液压线性特性曲线。
19.一种补偿控制系统,包括:
20.比例积分微分控制系统、补偿单元和位移传感器;所述pid控制系统包括:控制器和标准化单元;所述补偿单元维护有针对预设的液压线性特性曲线的特性补偿信息;其中:
21.所述控制器用于:
22.根据实际位移值和设定位移值的差值,向所述标准化单元输出速度值;其中,所述实际位移值由所述位移传感器采集的、由液压阀驱动的油缸活塞的位移值;
23.所述标准化单元用于:
24.根据预设的液压线性特性曲线和获取的速度值,输出第一电压值;
25.所述补偿单元用于:
26.根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值;
27.基于所述目标补偿值对所述电压值进行补偿处理,得到第二电压值并输出至所述液压阀;
28.所述液压阀用于:根据所述第二电压值驱动油缸活塞以相应的速度运动。
29.可选的,所述补偿单元维护有多种类型的液压阀所对应的特性补偿信息;
30.在根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值之前,所述补偿单元还用于:获取液压阀的类型,并根据所获取类型确定所使用的特性补偿信息。
31.可选的,所述特性补偿信息包括:第一标定表或第二标定表;所述第一标定表包括:各速度典型值与相对应的标定补偿值;所述第二标定表包括:各电压典型值与相对应的
标定补偿值;在所述根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值的方面,所述补偿单元具体用于:在所述第一标定表中查找与所述控制器输出的速度值对应的速度典型值;将查找到的速度典型值所对应的标定补偿值,确定为所述目标补偿值;或者,在所述第二标定表中查找与所述第一电压值对应的电压典型值;将查找到的电压典型值所对应的标定补偿值,确定为所述目标补偿值。
32.可选的,所述特性补偿信息包括:表征速度值与补偿值的对应关系的第一特性补偿曲线函数;或者,表征电压值与补偿值的对应关系的第二特性补偿曲线函数;在所述根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值的方面,所述补偿单元具体用于:将所述控制器输出的速度值作为自变量输入所述第一特性曲线函数,所述第一特性曲线函数输出的因变量的具体取值为所述目标补偿值;或者,将所述第一电压值作为自变量输入所述特性曲线函数,所述第二特性曲线函数输出的因变量的具体取值为所述目标补偿值。
33.可见,在本发明实施例引入了补偿单元,补偿单元维护有针对pid的液压线性特性曲线的特性补偿信息。
34.在pid系统根据实际位移值和设定位移值的差值计算出速度值,并基于速度值和液压线性特性曲线输出第一电压值后,由补偿单元根据特性补偿信息确定目标补偿值,并进行补偿处理后得到第二电压值,第二电压值用于控制液压阀驱动油缸活塞运动。通过补偿,可令速度值与第二电压值之间的关系符合真实的液压特性。并且,本发明实施例所提供的技术方案,无需要改变pid系统的处理逻辑,可与原有的pid系统兼容,同时可获得更符合真实液压特性的第二电压值,进而,液压阀基于第二电压值驱动活塞,也提高了活塞的定位精度。
附图说明
35.图1为本发明实施例提供的补偿控制系统的一种示例性结构;
36.图2为本发明实施例提供的补偿控制系统的另一种示例性结构;
37.图3为本发明实施例提供的液压阀控制方法的一种示例性流程;
38.图4为本发明实施例提供的表征速度值与补偿值的对应关系的第一特性补偿曲线函数;
39.图5为本发明实施例提供的表征电压值与补偿值的对应关系的第二特性补偿曲线函数;
40.图6为本发明实施例提供的对第一特性补偿曲线取典型值的示意图;
41.图7为本发明实施例提供的对第二特性补偿曲线取典型值的示意图。
具体实施方式
42.本发明实施例所提供的液压阀控制方法与系统,以提高定位精度。
43.请参见图1或图2,上述补偿控制系统可包括补偿单元1、位移传感器2和比例积分微分控制(pid)系统。
44.pid控制系统进一步可包括:控制器3(即图1中的loop controller)和标准化单元4(即图1中的scalling)。
45.在一个示例中,请参见图1,补偿单元1、控制器3和标准化单元4可均属于cpu的功能模块。
46.上述补偿单元1与液压阀相连接,向液压阀提供控制电压。液压阀则根据控制电压驱动油缸的活塞进行位移,位移传感器2设置于活塞处,采集活塞的实际位移值。
47.图1和图2中的axis表示电气轴,ram表示活塞,inc表示编码器增量。
48.在本发明实施例中,新增了补偿单元1,补偿单元维护有针对预设的液压线性特性曲线的特性补偿信息。
49.上述补偿控制系统可应用在需要对液压阀进行控制的设备中,例如,全液压操作机,锻压机组电气系统,机械手等。
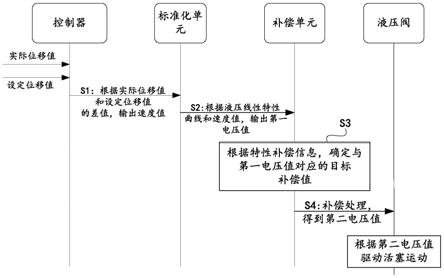
50.图3示出了由上述补偿控制系统所执行的液压阀控制方法的一种示例性流程,包括:
51.s1:控制器3根据实际位移值和设定位移值的差值,向标准化单元输出速度值;
52.其中,实际位移值是由前述的位移传感器2所采集的,是油缸活塞的位移值。
53.实际位移值和设定位移值的控制器的两个输入。
54.请参见图2,令实际位移值和设定位移值的差值以δs表示,在一个示例中,可采用下述公式计算速度值:
55.v=kv*δs。
56.其中,kv是位置环增益系数。kv可通过实验标定获得,或通过经验值设定。
57.s2:标准化单元4根据预设的液压线性特性曲线和获取的速度值,输出第一电压值。
58.需要说明的是,在图2中,u/min与电压相等同。
59.预设的液压线性特性曲线示例性地可参见图4。
60.在实际中,不同类型的液压阀可对应不同的液压线性特性曲线,则标准化单元4可维护有多种类型的液压阀所对应的液压线性特性曲线。
61.在输出第一电压值之前,标准化单元4可获取液压阀的类型(例如可通过人工输入或自动获取液压阀的类型),并根据所获取类型确定所使用的液压线性特性曲线。
62.s3:补偿单元1根据特性补偿信息,确定与第一电压值对应的目标补偿值。
63.在实际中,不同类型的液压阀可对应不同的特性补偿信息。
64.补偿单元1可维护有多种类型的液压阀所对应的特性补偿信息。
65.在确定目标补偿值之前,补偿单元1可获取液压阀的类型(例如可通过人工输入或自动获取液压阀的类型),并根据所获取类型确定所使用的特性补偿信息。或由人工选取特性补偿信息。
66.在一个示例中,请参见图4,特性补偿信息可包括:表征速度值与补偿值的对应关系的特性补偿曲线函数(可称为第一特性补偿曲线函数)。
67.在图4中,竖轴为速度值(flow rate),横轴为电压值,假定某一速度值在液压线性特性曲线所对应的第一电压值为u0,其在第一特性补偿曲线函数上对应的目标补偿值为δu,在液压阀的特性曲线所对应的电压值为u0+δu。
68.u0+δu是实际应输出至液压阀的控制电压值。传统的pid系统输出的控制电压值是u0。通过特性补偿曲线函数可确定与之相对应的目标补偿值,后续可进行补偿。
69.在另一示例中,特性补偿信息可包括:表征电压值与补偿值的对应关系的第二特性补偿曲线函数。
70.第二特性补偿曲线函数示例性地如图5所示,其竖轴可为补偿值,横轴为pid输出的电压值。
71.沿用前例,假定某一速度值在液压线性特性曲线所对应的第一电压值为u0,其在第二特性补偿曲线函数上对应的目标补偿值为δu,后续可计算出在液压阀的特性曲线所对应的电压值为u0+δu。
72.请参见图6,如对第一特性补偿曲线函数中的竖轴取典型值(即速度典型值),则速度典型值与相对应的标定补偿值可构成第一标定表。
73.同理,请参见图7,如对第二特性补偿曲线中的横轴取典型值(即电压典型值),则电压典型值与相对应的标定补偿值可构成第二标定表。
74.因此,在本发明其他实施例中,上述特性补偿信息可包括:第一标定表或第二标定表。
75.其中,第一标定表包括:各速度典型值与相对应的标定补偿值。
76.第二标定表包括:各电压典型值与相对应的标定补偿值。
77.s4:补偿单元1基于目标补偿值对电压值进行补偿处理,得到第二电压值并输出至液压阀。
78.在一个示例中,在特性补偿信息包括第一特性补偿曲线函数的情况下,步骤s4可具体化为:
79.将控制器输出的速度值作为自变量输入(代入)第一特性曲线函数,第一特性曲线函数输出的因变量的具体取值即为目标补偿值。
80.同理,在特性补偿信息包括第二特性补偿曲线函数的情况下,步骤s4可具体化为:
81.将上述第一电压值作为自变量输入第二特性曲线函数,第二特性曲线函数输出的因变量的具体取值即为目标补偿值。
82.在另一个示例中,在特性补偿信息包括:第一标定表的情况下,步骤s4可具体化为:
83.在第一标定表中查找与控制器输出的速度值所对应的速度典型值;
84.将查找到的速度典型值所对应的标定补偿值,确定为目标补偿值。
85.需要说明的是,控制器输出的速度值可能未必是某一典型值,可确定与之最接近的速度典型值,再将其对应的标定补偿值,确定为目标补偿值。
86.同理,在特性补偿信息包括第二标定表的情况下,步骤s4可具体化为:
87.在第二标定表中查找与第一电压值对应的电压典型值;
88.将查找到的电压典型值所对应的标定补偿值,确定为目标补偿值。
89.需要说明的是,第一电压值可能未必是电压典型值,可确定与之最接近的电压典型值,再将其对应的标定补偿值,确定为目标补偿值。
90.在确定了目标补偿值后,可将第一电压值与目标补偿值求和,得到第二电压值,并将第二电压值输出至液压阀作为控制电压。
91.可见,在本发明实施例引入了补偿单元,补偿单元维护有针对pid的液压线性特性曲线的特性补偿信息。
92.在pid系统根据实际位移值和设定位移值的差值计算出速度值,并基于速度值和液压线性特性曲线输出第一电压值后,由补偿单元根据特性补偿信息确定目标补偿值,并进行补偿处理后得到第二电压值,第二电压值用于控制液压阀驱动油缸活塞运动。通过补偿,可令速度值与第二电压值之间的关系符合真实的液压特性。并且,本发明实施例所提供的技术方案,无需要改变pid系统的处理逻辑,可与原有的pid系统兼容,同时可获得更符合真实液压特性的第二电压值,进而,液压阀基于第二电压值驱动活塞,也提高了活塞的定位精度。
93.下面介绍如何获取标定补偿值。一种示例性获取方式如下:
94.步骤a:确定预设电压值为起始电压值;
95.例如,将-10v作为起始电压值。
96.步骤b:向液压阀输入起始电压值,并以预设步长逐步增大或减少所输入的电压值。
97.起始电压值,以及,以预设步长逐步增大或减少的每一电压值均为电压典型值。
98.本领域技术人员可灵活设计步长的取值,例如可设计其为0.1v、0.01v等等。
99.以步长=0.1,起始电压值为-10v为例,各电压典型值包括:-10,-9.9,-9.8,-9.7
……
,以此类推,不作赘述。
100.步骤c:获取液压阀在各电压典型值下,驱动油缸活塞运动的速度值。
101.具体的,可以根据位移传感器所采集的位移位置进行计算,得到真实的速度值,也可在活塞处设置速度传感器来获取真实速度值。
102.经过步骤c,实际上已经建立了电压典型值与速度值之间的对应关系。
103.步骤d:根据所获取的各速度值,确定速度典型值。
104.在一个示例中,可将在步骤c获取的所有速度值均确定为速度典型值。
105.或者,也可挑选部分速度值作为速度典型值。例如,在步骤c获取了100个速度值,取其中的50个、80个作为速度典型值。
106.步骤e:使用速度典型值所对应的电压典型值,以及速度典型值在液压线性特性曲线中所对应的电压值,计算标定补偿值。
107.若构建第一标定表或第二标定表,可将同一速度典型值所对应的电压典型值,以及,其在液压线性特性曲线中所对应的电压值求差,得到标定补偿值。
108.举例来讲,假定某速度典型值a所对应的电压典型值为a1,速度典型值a在液压线性特性曲线中所对应的电压值为a2,可将a1-a2的差值作为标定补偿值。
109.当然,可多次重复步骤a-步骤d,得到同一速度典型值在不同次标定中所对应的标定补偿值,然后进行平均,或其他处理,得到最终的标定补偿值。
110.若构建第一特性补偿曲线函数,可以将步骤c中的电压典型值与速度值作为实验数据,用非线性数据拟合的方式来构建第一特性补偿曲线函数。
111.若构建第二特性补偿曲线函数,可将同一速度典型值所对应的电压典型值,以及,其在液压线性特性曲线中所对应的电压值作为实验数据,用非线性数据拟合的方式来构建第二特性补偿曲线函数。
112.非线性数据拟合为现有拟合方式,在此不作赘述。
113.下面介绍补偿控制系统。
114.图1或图2示出了上述补偿控制系统的一种示例性结构,包括补偿单元1、位移传感器2和比例积分微分控制(pid)系统,pid控制系统进一步可包括:控制器3和标准化单元4。
115.其中,补偿单元1与液压阀相连接,向液压阀提供控制电压。位移传感器2设置于活塞处,采集活塞的实际位移值。
116.控制器3用于:
117.根据实际位移值和设定位移值的差值,向标准化单元输出速度值;
118.其中,实际位移值由位移传感器2采集的、由液压阀驱动的油缸活塞的位移值;
119.标准化单元4用于:
120.根据预设的液压线性特性曲线和获取的速度值,输出第一电压值;
121.补偿单元1用于:
122.根据特性补偿信息,确定与第一电压值对应的目标补偿值;
123.基于目标补偿值对电压值进行补偿处理,得到第二电压值并输出至液压阀;
124.液压阀用于:根据第二电压值驱动油缸活塞以相应的速度运动。
125.具体内容可参见前述描述,在此不作赘述。
126.在本发明其他实施例中,补偿单元1维护有多种类型的液压阀所对应的特性补偿信息;
127.在根据特性补偿信息,确定与第一电压值对应的目标补偿值之前,补偿单元1还具体用于:
128.获取液压阀的类型,并根据所获取类型确定所使用的特性补偿信息。
129.具体内容可参见前述描述,在此不作赘述。
130.同理,标准化单元4可维护有多种类型的液压阀所对应的液压线性特性曲线;
131.在根据预设液压线性特性曲线和获取的速度值,输出第一电压值之前,标准化单元4还可用于:获取液压阀的类型,并根据所获取类型确定所使用的液压线性特性曲线。
132.具体内容可参见前述描述,在此不作赘述。
133.在本发明其他实施例中,特性补偿信息可具体包括:第一标定表或第二标定表。
134.第一标定表进一步包括:各速度典型值与相对应的标定补偿值。
135.第二标定表进一步包括:各电压典型值与相对应的标定补偿值。
136.则在根据特性补偿信息,确定与第一电压值对应的目标补偿值的方面,补偿单元1可具体用于:
137.在第一标定表中查找与控制器输出的速度值对应的速度典型值;
138.将查找到的速度典型值所对应的标定补偿值,确定为目标补偿值;
139.或者,
140.在第二标定表中查找与第一电压值对应的电压典型值;
141.将查找到的电压典型值所对应的标定补偿值,确定为目标补偿值。
142.具体内容可参见前述描述,在此不作赘述。
143.在本发明其他实施例中,上述特性补偿信息可包括:表征速度值与补偿值的对应关系的第一特性补偿曲线函数;或者,表征电压值与补偿值的对应关系的第二特性补偿曲线函数。
144.则在根据所述特性补偿信息,确定与所述第一电压值对应的目标补偿值的方面,
上述补偿单元1可具体用于:
145.将所述控制器输出的速度值作为自变量输入所述第一特性曲线函数,所述第一特性曲线函数输出的因变量的具体取值为所述目标补偿值;
146.或者,
147.将所述第一电压值作为自变量输入所述特性曲线函数,所述第二特性曲线函数输出的因变量的具体取值为所述目标补偿值。
148.专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及模型步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
149.结合本文中所公开的实施例描述的方法或模型的步骤可以直接用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、寄存器、硬盘、可移动磁盘、wd-rom、或技术领域内所公知的任意其它形式的存储介质中。
150.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1