一种基于压力波动快速调节流量控制器阀门的控制方法与流程
1.本发明涉及cmac神经网络技术领域,尤其涉及一种基于压力波动快速调节流量控制器阀门的控制方法。
背景技术:
2.流量控制器使用工况中通常有大流量的流量控制器与之并联使用,所以当大流量的流量控制器启闭过程中对管路中的压力会产生影响,通常会造成流量控制器的流量失控;现有的部分流量控制器通过构建压力、流量、阀控电压间的固定模型已经能做到在固定的工况下对管路中的压力作出快速响应,补偿压力波动造成的流量失控,但是随着流量控制器的使用时间变长,阀门控制模块的老化和工况的变化导致构建的固定模型不再适用,流量控制器对压力波动的响应变差。
技术实现要素:
3.针对现有技术存在的问题:管道上游压力波动被流量控制器内的热式传感器模块检测到时具有滞后性,阀门开度控制模块响应不及时,导致流量的失控。
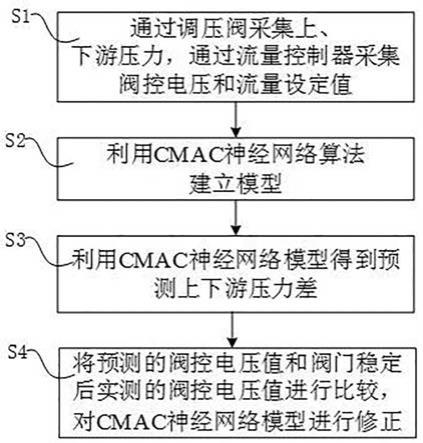
4.本发明解决其技术问题所采用的技术方案是:一种基于压力波动快速调节流量控制器阀门的控制方法,包括以下步骤:s1:启动流量控制器,气源流进管道,使管道内压力发生变化;阀控电压随着流量设定值和上、下游压力的变化而变化;通过调压阀采集上、下游压力,通过流量控制器采集阀控电压和流量设定值;采集上游压力、下游压力、阀控电压和设置流量设定值需在满压差量程、流量设定值量程和满阀控电压范围内;s2、以上下游压力差、流量设定值和阀控电压为参数,利用cmac神经网络算法建立模型,并利用c语言将cmac神经网络模型写入流量控制器处理单元中;进一步的,cmac神经网络模型有两种,一种以上下游压力差、流量设定值为输入,阀控电压为输出;另一种以阀控电压和流量设定值为输入,上下游压力差为输出;s3:流量控制器应用时,根据实时采集的阀控电压和流量设定值,利用cmac神经网络模型得到预测的上下游压力差;进一步的,cmac神经网络模型,通过设置维度和层数组成输入空间、设置最大训练次数、训练目标精度和学习率,当训练数据作为输入向量时将得到输入空间表示的点,相应激活输出相连空间中的权值,网络中的输出就是激活元素的权值累加和,最后根据期望输出与实际输出地误差来调整权值;s4:当上游压力波动超过阈值时,结合s3预测的上下游压力差,将波动后更新的上下游压力差和流量设定值代入cmac神经网络模型,得到预测的阀控电压后给到阀门开度控制模块,并将预测的阀控电压值和阀门稳定后实测的阀控电压值进行比较,对cmac神经网络模型进行修正。
5.本发明的有益效果是:1、通过流量控制器内的压力检测模块检测上游压力,根据压力波动进行流量控制,以补偿压力波动对流量的影响,有效地防止流量失控;2、当阀门的模型发生变化时,自动对cmac神经网络模型进行训练更新。
附图说明
6.图1为本发明基于压力波动快速调节流量控制器阀门的控制方法流程图;图2为本发明测试数据采集设备连接图;图3为本发明流量控制器内部控制模块工作图;图4为本发明以上下游压力差和流量设定值为输入,阀控电压为输出训练cmac神经网络模型效果图;图5为本发明以阀控电压和流量设定值为输入,上下游压力差为输出训练cmac神经网络模型效果图;图6为本发明上游压力波动50kpa后,预测阀控电压与实测阀控电压差值图;图7为本发明阀控电压整体偏移3v后,预测阀控电压与实测阀控电压差值图;图8为本发明阀控电压整体偏移3v后的实测数据对cmac神经网络模型修正后的效果图。
具体实施方式
7.下面结合附图,对本发明的实施例作进一步的详细说明。
8.本发明的一种基于压力波动快速调节流量控制器阀门的控制方法,具体为:如图1所示,s1:启动流量控制器,气源流进管道,使管道内压力发生变化;阀控电压随着流量设定值和上、下游压力的变化而变化;通过调压阀采集上、下游压力,通过流量控制器采集阀控电压和流量设定值;如图2所示,管道中分别安装调压阀、流量控制器和流量计,气源(本实施例测试气源为氮气)由管道入口流入,通过调压阀在管道入口处采集上游压力,通过调压阀在管道出口采集下游压力,流量控制器中设置流量设定值并采集阀控电压,流量计校准流量设定值;启动流量控制器,采集上游压力、默认下游压力为0kpa(表压)、设置流量设定值,气路开通后,变化上游压力和流量设定值,采集随之变化的阀控电压、采集上游压力和流量设定值;本实施例中流量控制器的压力使用范围50
‑
170kpa(表压),流量设定值为0
‑
500sccm,上游压力按10kpa递增、流量设定值按50sccm递增,共采集130组数据如表1所示:
其中,上下游压力差=上游压力
‑
下游压力;启动流量控制器,设定阀控电压和流量设定值,气路开通,变化流量设定值和阀控电压,采集随之变化的上下游压力差、采集设定的阀控电压和流量设定值;本实施例中流量控制器的阀控电压范围35
‑
68v,流量设定值为0
‑
500sccm,采集190组数据如表2所示:s2、以上下游压力差、流量设定值和阀控电压为参数,利用cmac神经网络建立模型,并将cmac神经网络模型写入流量控制器处理单元中;进一步的,cmac神经网络模型有两种,一种以上下游压力差、流量设定值为输入,阀控电压为输出;另一种以阀控电压和流量设定值为输入,上下游压力差为输出;建立上下游压力差、流量设定值为输入,阀控电压为输出的cmac神经网络模型;将表1采集上下游压力差、流量设定值作为输入,阀控电压作为输出,送入cmac神经网络模型训练;通过设置每一维度的层数为6、每一层的块数为7、初始化权值所需的294个存储空间,设置学习率为0.04,训练约5000次达到目标精度0.05v;效果如图4所示,建立稳定的cmac神经网络模型,其中x轴为130组训练样本。
9.将表2采集阀控电压、流量设定值作为输入,上下游压力差作为输出,送入cmac神
经网络模型训练;通过设置每一维度的层数为6、每一层的块数为7、初始化权值需要294个存储空间,设置学习率为0.04,训练约5000次达到目标精度10kpa,效果如图5所示,建立稳定的cmac神经网络模型,x轴为190组训练样本;s3:流量控制器应用时,根据实时采集阀控电压和处理单元中流量设定值,利用cmac神经网络模型得到预测的上下游压力差;如图3所示cmac神经网络模型通过c语言写入流量控制器的处理单元,流量控制器接收流量设定信号,当压力检测模块检测到的上游压力波动高于阈值时(如下表3上游压力变化的阈值为50kpa),通过cmac神经网络模型预测波动后的阀门控制信号并给到阀门开度控制模块;s4:当上游压力波动超过阈值时,结合s3预测的上下游压力差,将波动后更新的上下游压力差和流量设定值代入cmac神经网络模型,得到预测的阀控电压后给到阀门开度控制模块,并将预测的阀控电压值和阀门稳定后实测的阀控电压值进行比较,对cmac神经网络模型进行修正。
10.快速估算出上游压力波动后阀控电压需调整的值,利用122组验证数据对模型进行校验,具体数据如表3所示:表中上游压力波动阈值为50kpa,得出阀控电压实测结果与预测结果的差值,如图6所示:从图中可以看出在量程范围内阀控电压预测值与实测值偏差在1.5v以内,表明在压力波动后cmac神经网络模型的预测阀控电压值准确性较高。
11.当阀门的模型发生变化(例如阀门老化)导致阀控电压整体偏移3v时,cmac神经网络模型计算出的阀控电压与实测的差值如图7所示,从图中可以看出模型预测值与实际值的差值出现了整体偏移;将阀门老化后的上下游压力差,流量设定值,阀控电压作为新的训练数据更新模型,训练约500次以后,新的模型计算出的阀控电压与实际电压的差值如图8所示,整体误差都控制在0.3v以内,说明本发明建立的cmac神经网络模型对流量控制阀的参数偏移具有良好的跟随性。
12.本发明的有益效果是通过流量控制器内的压力检测模块检测上游压力,根据压力波动进行流量控制,使得压力波动期间流量可以得到精准控制;当阀门的模型发生变化时,自动对cmac神经网络模型进行训练更新。
13.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1