一种基于郊狼信息熵的无人机集群任务动态分配方法
1.本发明是一种基于郊狼信息熵的无人机集群任务动态分配方法,属于无人机自主控制领域。
背景技术:
2.多无人机动态任务分配(multi-uav task dynamic allocation)技术是多无人机集群自主控制关键技术之一,不仅为无人机编队自主控制决策提供基础,同时也为编队控制管理提供飞行目标及任务清单。通过多无人机动态任务分配算法,集群系统内部可以实现自主的协调控制,将复杂的任务流程拆分成若干个简单的任务,通过多无人机之间多个任务的分配和协调控制,实现对复杂任务更加高效可靠地完成。
3.在信息化革命的推动下,无人机集群的任务目标对象从单目标到多目标、体系目标发展,相对应的执行任务方式也发生变化。针对复杂的任务目标,无人机间的协同成为集群是否能够完成复杂任务的重要条件。对于集群协同系统,如果缺乏行之有效的协同控制策略,不仅无法体现集群较之于单机的优势,甚至会出现机间的冲突,甚至碰撞的严重情况。为了确保无人机集群安全、高效地执行任务,需要根据任务需求、无人机飞行特性及任务载荷等关键因素进行合适的任务规划,确保集群中每个无人机都能充分发挥自身的作用,且实现“一加一大于二”的集群加成,提高整体的任务执行效能。集群协同多任务分配问题的目标是在执行任务无人机集群性能允许的范围内,针对不同用户提出的多任务需求,确定出各无人机的任务执行序列,包括目标集合、执行任务的类型以及不同任务的执行顺序和时间等,确保集群在多任务执行过程中的协同性。研究无人机集群高效率协同多任务分配是提升无人机集群未来飞行能力和执行任务效能的重要途径,具有较大的理论和实际意义。
4.真正具备完全自主能力的多无人机系统还没有出现,但随着技术进步,已经具备了部分自主能力。目前,对多无人机协同动态任务规划研究主要分为集中式任务分配和分布式任务分配两类。在集中式算法设计方面,加州理工大学学者采用混合整数线性规划方法,建立目标函数和约束条件,求解无人机集群协同攻击固定目标的时序安排问题;俄亥俄州大学学者采用匈牙利算法对集群协同目标分配问题进行研究,结合约束规划方法得到变量集合内的所有变量对应的值域,进而求解对应的组合优化问题。在分布式算法设计方面,美国空军研究室学者利用分布式博弈决策模型,实现了群对群对抗中的目标分配;法国里昂大学学者采用拍卖算法将“招标-投标-中标-确认”四个交互阶段转为竞价模式转卖,定义参与方、拍卖品、收益函数和赢家策略等要素,实现分布式集群协作指派。
5.综上,上述传统的大规模群体决策方法无法智能处理单一方案决策问题,针对于此,本发明提出了一种基于郊狼信息熵的无人机集群动态任务分配方法,在不确定的任务环境中,针对多无人机协同任务动态规划问题,建立了基于郊狼信息熵的无人机集群协同任务分配流程,优化了多无人机协同任务分配的时效性和任务完成效率,且同时考虑了集群内资源分配的均衡性与目标威胁属性,降低了对同一目标的重复执行次数,保证了集群
执行任务的持久性,有效提高了多无人机集群的自主性。
技术实现要素:
6.本发明目的在于提出一种基于郊狼信息熵的无人机集群任务动态分配方法,以提供一种高效可行的无人机集群动态任务分配方法,旨在适应动态多变的任务环境,符合无人机实际飞行约束,提高集群执行任务的效率与有效性,可以支持持久、高效的任务执行过程,为进一步提升无人机集群的自主水平奠定基础。
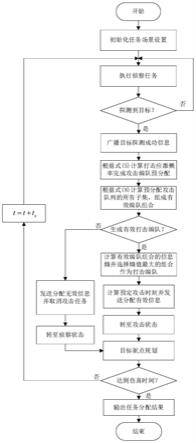
7.针对无人机集群协同搜索打击问题,本发明提出了一种基于郊狼信息熵的无人机集群任务动态分配方法,该方法的流程图如图1所示,具体实施步骤如下:
8.步骤一:搭建无人机集群典型任务场景
9.如图2所示,对于任务区域ω,将其划分为d
x
×dy
×dz
个同等大小的三维离散网格,d
x
、dy和dz分别表示在x、y和z三个方向上的网格数量,第d个网格的三维边界坐标为(x
dmin
,x
dmax
)
×
(y
dmin
,y
dmax
)
×
(z
dmin
,z
dmax
)。
10.在给定的任务空间ω内,存在我方无人机n架,该集群对k个目标执行协同搜索打击任务。考虑多种无人机类型,各类无人机具备的侦察与打击目标的能力不同,设无人机集群中共有nu类无人机,分别采用概率矩阵pr与pa分别表示各无人机对目标的侦察与打击概率,概率矩阵pr与pa为:
[0011][0012]
其中,p为无人机类型索引,pr(p)表示p类无人机对目标的侦察概率,pa(p)表示p类无人机对目标的打击概率。
[0013]
设置k个任务目标随机分布在任务区域内,每个任务目标具有一定的攻击价值rk(t),其随时间变化的函数可表示为:
[0014][0015]
其中,k为任务目标编号rk(t)为任务目标k在t时刻具有的攻击价值,为任务目标k在初始时刻具有的攻击价值,0<η<1为目标攻击价值随时间的衰减因子。
[0016]
步骤二:搭建单体无人机运动学模型
[0017]
单体无人机运动模型选用如下所示的二阶系统模型,每架无人机都配置了速度、航向和航迹三通道的自动驾驶仪:
[0018][0019]
其中,其中,与为无人机i的飞行速度、偏航角与航迹角的输入控制指令,vi、χi与γi为第i架无人机的飞行速度、偏航角与航迹角,g为重力加速度g=9.8m/s2,v
min
与v
max
为无人机飞行速度限制,ω
max
为无人机最大航向角速度的绝对值,γ
min
与γ
max
为无人机航迹角限制,τv、τ
χ
与τ
γ
分别为无人机自动驾驶仪飞行速度、偏航角与航迹角的控制响应时间。
[0020]
步骤三:分配所有无人机为侦察模式
[0021]
任务开始阶段,所有无人机的初始任务模式都设置为侦察状态,即在任务区域ω内寻找目标点。无人机判断是否侦察到目标的公式为:
[0022][0023]
其中,表示第i架无人机对第k个目标的二进制探测函数,1表示探测成功,0则表示未成功。d(i)、d(k)分别表示第i架无人机和第k个目标所处的三维任务空间位置;rand为[0,1]内的随机数,p(i)表示第i架无人机的类型。若则第i架无人机向任务区域内其他无人机个体广播探测成功信息,并跳转至步骤四,进入攻击编队预分配;否则,继续执行当前的侦察任务。
[0024]
步骤四:攻击编队初分配
[0025]
当即第i架无人机成功侦察到任务目标k,并负责广播对任务目标k的探测成功信息。处于侦察状态的第j(j≠i)架无人机在接收到关于任务目标k的相关信息后,若其尚未成功探测到其他任务目标信息,则按式(5)计算其打击应激概率:
[0026][0027]
其中,表示第j架无人机选择攻击任务目标k的应激概率;表示t时刻任务目标k的打击激励函数;为第j架无人机选择攻击任务目标k的打击应激阈值,
其由式(6)确定
[0028][0029]
其中,为第j架无人机选择攻击任务目标k的打击应激阈值;a1、a2、b均为模型参数;δ
jk
表示第j架无人机对任务目标k的打击能力;p
a,min
为允许的最小打击概率;δτ
jk
表示第j架无人机到达任务目标k所处位置的预计飞行时间,由式(7)确定:
[0030][0031]
其中,{xk,yk,zk}分别为任务目标k的三维位置;δd
jk
表示第j架无人机与任物目标k的相对距离,表示向上取整,α>1为延迟系数。第j架无人机依据打击应激概率选择是否攻击任务目标k。若是,则第j架无人机向第i架无人机返回应答信息及其无人机类型p(j);否则,继续执行侦察任务。第i架无人机在一个决策周期ts内接收来自其他无人机的应答信息,得到应答无人机序列qi。以此为基础构建针对任务目标k的攻击编队预分配队列ck={qi,i},从而进入打击编队分配阶段。
[0032]
打击应激机制能够使无人机集群快速反应任务目标侦察事件,及时发布和回馈具备有效打击能力的无人机列表,在一个决策周期内即可开展对时敏目标的协同打击,而无须等待其他武器平台支援,从而提高了侦察信息时效性和任务执行效率。
[0033]
步骤五:生成有效攻击编队组合
[0034]
首先,第i架无人机根据任务目标k的预分配攻击队列ck,对于ck中的第n个子集定义为其具备的攻击总能量,为其能量需求,与分别由式(8)计算:
[0035][0036]
其中,表示任务目标k的期望编队打击概率。若满足则表示子集中的所有无人机具有的总打击能量满足对任务目标k的打击任务需求,将其加入有效编队组合σk。对ck的每个子集进行轮询后判断σk是否为空。若是,则表明当前不存在针对任务目标k的有效编队组合,第i架无人机将任务目标k暂时搁置,清除探测标志并向ck中的其他无人机发送分配无效信息,使其继续执行侦察任务;否则,对于有效编队组合σk中的每个子集,按步骤六计算其信息熵。
[0037]
步骤六:根据信息熵选择打击编队
[0038]
对于σk中的第n个子集集合中的每架无人机对于任务目标k都存在一个攻
击评价值矢量其含义是第i架无人机对任务目标k执行攻击任务的偏好度,l为影响偏好度的指标个数。按下式计算集合中两两无人机之间的决策相聚度
[0039][0040]
其中,1<a<+∞,1<b<+∞,且
[0041]
引入阈值ρ,0≤ρ≤1,设置条件:
[0042][0043]
以此来判断第i架无人机与第j架无人机针对任务目标k的决策是否可以相聚,当它们的偏好矢量之间的相聚度大于ρ时,则表示它们意见统一,可以相聚,否则认为它们不可以相聚。
[0044]
判断子集中各个成员是否相聚,由此,剔除成员间不相聚的子集,剩余的所有子集为可用的备选子集,所有备选子集组成备选编队组合σ
′k。假设针对任务目标k,共存在m个备选子集,对于第m个备选子集定义其对任务目标k的攻击评价矢量即攻击偏好度为:
[0045][0046]
对进行标准化处理,得到单位矢量,并记为标准化处理方法为:
[0047][0048]
由此可得到每个备选子集的攻击评价标准化矢量定义其熵为:
[0049][0050]
根据熵的含义,备选子集的熵越大,该子集越接近最优解。按照式(13)计算每个备选子集的熵,选择熵值最大的备选子集作为对任务目标k的打击编队αk。对于每架已分配无人机j∈αk,将其任务模式转换为攻击任务模式。
[0051]
步骤七:攻击编队中的无人机控制指令生成
[0052]
第i架无人机向αk中其他无人机广播分配关于任务目标k的有效信息,向未被选
择作为打击编队的无人机发送无效分配信息,接受到无效分配信息的无人机转为侦察任务模式,跳转至步骤二。打击编队αk中的所有无人机,需要同时到达任务目标k点或一定攻击范围内,使得针对任务目标k的整个打击编队同时到达时间满足式(14):
[0053][0054]
为实现这一目的,采用分散化控制方法,即将偏航角输入控制指令设置为任务目标k相对于第i架无人机的视线角,将航迹角输入控制指令设置为任务目标k相对于第i架无人机的高低角,飞行速度输入控制指令满足一致性分散化控制策略。
[0055]
步骤八:输出多无人机动态任务分配结果
[0056]
实时输出无人机集群与任务目标空间分布情况,在到达仿真时间后,输出打击收益变化曲线与任务分配甘特图。
[0057]
本发明提出的一种基于郊狼信息熵的无人机集群任务动态分配方法,其优点在于:本发明可实现多无人机的动态任务分配过程。该方法综合考虑了资源均衡、目标威胁与目标点动态变化的情况,建立了基于郊狼信息熵的能量分配模型,能够适应复杂多变的任务场景,且在资源均衡度与任务完成效率方面均表现出较为明显的优势,增强了集群协同执行任务的时效性,能够支持高效、持久的多无人机协同任务。
附图说明
[0058]
图1基于信息熵改进的仿狼群智能多无人机动态任务分配方法流程图
[0059]
图2三维网格化任务场景地图
[0060]
图3郊狼信息熵任务分配仿真起始时刻场景
[0061]
图4郊狼信息熵任务分配仿真300秒时刻场景
[0062]
图5郊狼信息熵任务分配仿真最终时刻场景
[0063]
图6任务收益变化曲线
[0064]
图7任务分配甘特图
[0065]
图中标号及符号说明如下:
[0066]
o——坐标系原点
[0067]
x——坐标系横轴
[0068]
y——坐标系纵轴
[0069]
z——坐标系竖轴
[0070]
t——当前仿真时间
[0071]
ts——单次仿真迭代时间
具体实施方式
[0072]
下面通过一个具体的无人机集群动态任务分配实例来验证本发明所提方法的有效性。实验计算机配置为inter core i7-8750h处理器,2.20ghz主频,16g内存,软件为matlab2020a版本。
[0073]
本方法的具体步骤如下:
[0074]
步骤一:搭建无人机集群典型任务场景
[0075]
任务区域ω为20千米
×
20千米
×
600米,将其划分为10
×
10
×
5个同等大小的三维离散网格,即x、y和z三个方向上的网格数量分别为10个、10个和4个。
[0076]
在任务空间ω内,存在我方无人机30架,该集群对25个目标执行协同搜索打击任务。考虑3种无人机类型,每种类型的无人机各10架,各种无人机具备的侦察与打击目标的能力不同,设各类无人机对目标的侦察与打击概率矩阵pr与pa为:
[0077][0078]
设置15个任务目标随机分布在任务区域内,每个任务目标具有一定的攻击价值rk(t),其随时间变化的函数可表示为:
[0079][0080]
其中,k为任务目标索引,rk(t)为任务目标k在t时刻具有的攻击价值,设置任务目标k在初始时刻具有的攻击价值η=0.003为目标攻击价值随时间的衰减因子。
[0081]
步骤二:搭建单体无人机运动学模型
[0082]
单体无人机运动模型选用如下所示的二阶系统模型,每架无人机都配置了速度、航向和航迹三通道的自动驾驶仪:
[0083][0084]
其中,其中,与为无人机i的飞行速度、偏航角与航迹角的输入控制指令,vi、χi与γi为第i架无人机的飞行速度、偏航角与航迹角,g为重力加速度g=9.8m/s2,v
min
=60千米/小时,v
max
=600千米/小时,ω
max
=0.8,=0.8,τv=τ
χ
=τ
γ
=5s。
[0085]
步骤三:分配所有无人机为侦察模式
[0086]
任务开始阶段,所有无人机的初始任务模式均设置为侦察状态,即在任务区域ω内寻找目标点。无人机判断是否侦察到目标的公式为:
[0087][0088]
其中,表示第i架无人机对第k个目标的二进制探测函数,1表示探测成功,0则表示未成功。d(i)、d(k)分别表示第i架无人机和第k个目标所处的三维任务空间位置;rand为[0,1]内的随机数,p(i)表示第i架无人机的类型。假设即第i架无人机成功探测到任务目标k,并向任务区域内其他无人机个体广播探测成功信息,并跳转至步骤四,进入攻击编队预分配。
[0089]
步骤四:攻击编队预分配
[0090]
即第i架无人机成功侦察到任务目标k,并负责广播对任务目标k的探测成功信息。处于侦察状态的第j(j≠i)架无人机在接收到关于任务目标k的相关信息后,若其尚未成功探测到其他任务目标信息,则按式(19)计算其打击应激概率:
[0091][0092]
其中,表示第j架无人机选择攻击任务目标k的应激概率;表示t时刻任务目标k的打击激励函数;为第j架无人机选择攻击任务目标k的打击应激阈值,其由式(20)确定
[0093][0094]
其中,为第j架无人机选择攻击任务目标k的打击应激阈值;a1=a2=333,b=0.01;δ
jk
表示第j架无人机对任务目标k的打击能力;允许的最小打击概率p
a,min
=0.7;δτ
jk
表示第j架无人机到达目标k所处位置的预计飞行时间,由式(21)确定:
[0095][0096]
其中,{xk,yk,zk}分别为任务目标k的三维位置;δd
jk
表示第j架无人机与任物目标k的相对距离,表示向上取整,延迟系数α=1.2。第j架无人机依据打击应激概率选择是否攻击任务目标k。若是,则第j架无人机向第i架无人机返回应答信息及其无人机类型p(j);否则,继续执行侦察任务。第i架无人机在一个决策周期ts=2s内接收来自其他无人机的应答信息,得到应答无人机序列qi。以此为基础构建针对任务目标k的攻击编队预分配队列ck={qi,i},从而进入打击编队分配阶段。
[0097]
打击应激机制能够使无人机集群快速反应任务目标侦察事件,及时发布和回馈具备有效打击能力的无人机列表,在一个决策周期内即可开展对时敏目标的协同打击,而无
须等待其他武器平台支援,从而提高了侦察信息时效性和任务执行效率。
[0098]
步骤五:生成有效攻击编队组合
[0099]
首先,第i架无人机根据任务目标k的预分配攻击队列ck,对于ck中的第n个子集定义为其具备的攻击总能量,为其能量需求,与分别由式(22)计算:
[0100][0101]
其中,表示任务目标k的期望编队打击概率。若满足则表示子集中的所有无人机具有的总打击能量满足目标k的打击任务需求,将其加入有效编队组合σk。对ck的每个子集进行轮询后判断σk是否为空。若是,则表明当前不存在针对任务目标k的有效编队组合,第i架无人机将任务目标k暂时搁置,清除探测标志并向ck中的其他无人机发送分配无效信息,使其继续执行侦察任务;否则,对于有效编队组合σk中的每个子集,按步骤六计算其信息熵。
[0102]
步骤六:根据信息熵选择打击编队
[0103]
对于σk中的第n个子集集合中的每架无人机对于任务目标k都存在一个攻击评价值矢量其含义是第i架无人机对任务目标k执行攻击任务的偏好度,影响偏好度的指标个数l=4。按下式计算集合中两两无人机之间的决策相聚度
[0104][0105]
其中,a=b=2,
[0106]
引入阈值ρ=0.75,设置条件:
[0107][0108]
以此来判断第i架无人机与第j架无人机针对任务目标k的决策是否可以相聚,当它们的偏好矢量之间的相聚度大于ρ时,则表示它们意见统一,可以相聚,否则认为它们不可以相聚。
[0109]
判断子集中各个成员是否相聚,由此,剔除成员间不相聚的子集,剩余的所有子集为可用的备选子集,所有备选子集组成备选编队组合σ
′k。假设针对目标k,共存在m个备选子集,对于第m个备选子集定义其对目标k的攻击评价矢量即攻击偏好度为:
[0110][0111]
对进行标准化处理,得到单位矢量,并记为标准化处理方法为:
[0112][0113]
由此可得到每个备选子集的攻击评价标准化矢量定义其熵为:
[0114][0115]
根据熵的含义,备选子集的熵越大,该子集越接近最优解。按照式(27)计算每个备选子集的熵,选择熵值最大的备选子集作为对任务目标k的打击编队αk。对于每架已分配无人机j∈αk,将其任务模式转换为攻击任务模式。
[0116]
步骤七:攻击编队中的无人机控制指令生成
[0117]
第i架无人机向αk中其他无人机广播分配关于任务目标k的有效信息,向未被选择作为打击编队的无人机发送无效分配信息,接受到无效分配信息的无人机转为侦察任务模式,跳转至步骤二。打击编队αk中的所有无人机,需要同时到达任务目标点k或一定攻击范围内,使得针对任务目标k的整个打击编队同时到达时间满足式(28):
[0118][0119]
为实现这一目的,采用分散化控制方法,即将偏航角输入控制指令设置为任务目标k相对于第i架无人机的视线角,将航迹角输入控制指令设置为任务目标k相对于第i架无人机的高低角,飞行速度输入控制指令满足一致性分散化控制策略。
[0120]
步骤八:输出多无人机动态任务分配结果
[0121]
实时输出无人机集群与任务目标空间分布情况,图3至图5分别为起始时刻、150秒与最终时刻的仿真结果。在到达仿真时间后t
max
=300秒,输出任务收益变化曲线如图6与任务分配甘特图如图7。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1