一种智能移动设备通过狭窄通道的方法与流程
1.本发明涉及路径规划领域,特别是一种智能移动设备通过狭窄通道的方法。
背景技术:
2.狭窄路径规划是路径规划中在实际应用场景中普遍遇到的问题。目前较为流行的路径规划算法,大多为了提高规划效率,在最短路径计算算法上面。而是实际在业务上,我们需要机器人运动到我们所指定的点,而该点对于目前的算法来说并不是一个最优的到达点,因此,机器人只会停在一个相对较优化的点而不是真正到达我们指定的目标点。例如,在一些狭窄通道场景下,如:高铁车厢,飞机内舱,教室课桌间,需要智能移动设备穿过这些场景来完成一些工作或者学习的任务。在通过狭窄通道的时候,智能移动设备往往会容易陷入局部路径最优,在下一段路径中,运动轨迹不够平滑,因为碰到障碍物从而无法到达终点。
技术实现要素:
3.本发明的目的是为了解决背景技术中通过狭隘通道,无法作出正确的运行轨迹,从而浪费时间和影响工作和学习效率的问题,设计了一种智能移动设备通过狭窄通道的方法。
4.实现上述目的本发明的技术方案为,一种智能移动设备通过狭窄通道的方法,设定m条模拟路径,每条路径记录的时刻个数为n,通过在每条路径上使每个运动时刻f(x)的变化率最大,且下一个时刻的f(x)趋向于0,来确定智能移动设备通过狭窄通道的最优路径,具体公式如下:
[0005][0006]
其中,所述s
l’和所述s
r’为每个运动时刻t,智能移动设备行进过程中遇到的障碍物与分割线段l
割
、线段pa和线段pb在航向角α
l
和航向角αr夹角范围内包含松弛间隔d围成的面积;
[0007]
所述分割线段l
割
为智能移动设备在行进状态中,通过雷达检测到障碍物上的两个点a和b连成的线段ab与中心线l的交点p与智能移动设备底盘的中心点,也就是坐标原点o的连线;
[0008]
所述航向角α
l
为障碍物检测点a和坐标原点o之间连接的线段与中心线l之间的夹角;
[0009]
所述航向角αr为障碍物检测点b和坐标原点o之间连接的线段与中心线l之间的夹角;
[0010]
所述线段pa和所述线段pb分别为交点p到障碍物上的两个点a和b之间的距离;
[0011]
所述松弛间隔d为平行于智能移动设备底盘正向前进的中心线l的直线与中心线l
的间隔距离。
[0012]
为了对本技术方案进行进一步补充,所述s
l’和s
r’的计算条件如下:
[0013]
a:sr>s
l
时,s
r’=sr-sd,s
l’=s
l
+sd;
[0014]
b:sr<s
l
时,s
r’=sr+sd,s
l’=s
l
-sd;
[0015]
所述s
l
和sr为为每个运动时刻t,智能移动设备行进过程中遇到的障碍物与分割线段l
割
、线段pa和线段pb在航向角α
l
和航向角αr夹角范围内围成的面积;
[0016]
所述sd的计算公式为sd=d*l
割
。
[0017]
为了对本技术方案进行进一步补充,设定|sr-s
l
|>2*d。
[0018]
为了对本技术方案进行进一步补充,所述障碍物在s
l
、sr、s
l’和s
r’内部时,所要计算的面积为多边形的面积。
[0019]
为了对本技术方案进行进一步补充,所述s
l
与sr面积比为1。
[0020]
为了对本技术方案进行进一步补充,所述航向角α
l
和航向角αr与障碍物之间的间距成正比,间距越窄,航向角α
l
和航向角αr越小。
[0021]
为了对本技术方案进行进一步补充,所述每个运动时刻t有着对应的航向角α
l
和航向角αr,所述每个航向角α
l
和航向角αr对应相应的距离信息,所述距离信息为智能移动设备底盘的中心点o到a或b的距离。
[0022]
为了对本技术方案进行进一步补充,所述a或b为每个运动时刻t雷达通过所述距离信息检测到障碍物上的两个点。
[0023]
其有益效果在于:
[0024]
在实际应用中,该方法使智能移动设备在狭窄通道中行走更平滑,更易于保持直线,由于计算了中心线两侧障碍物对于行走的权重影响,局部路径规划会偏向于行走过道中间,从而更好的通过复杂狭窄区域。在结算结果中也可以进一步加入平滑因子,减少障碍物距离智能移动设备权重的影响,在不发生碰撞的前提下,让智能移动设备在大多数情况下保持直行。(因为目前的开源算法是根据障碍物到底盘的中心点,或者底盘边缘的距离来计算远近。使用的是个别最近的点,而这样在移动过程中会产生距离计算一直在变化,导致移动的路径不够平滑。目前使用距离障碍物面积的大小,来替代单个距离的大小。使底盘的航向角变化不会太大。)
附图说明
[0025]
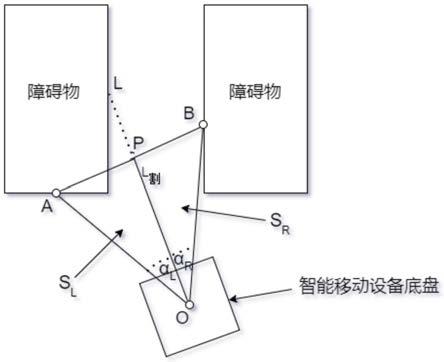
图1为智能移动设备行进状态中局部路径规划计算的状态模型图;
[0026]
图2为智能移动设备行进状态中加入松弛间隔后局部路径规划计算的状态模型图;
[0027]
图3为t1运动时刻下,智能移动设备运行轨迹坐标图;
[0028]
图4为t2运动时刻下,智能移动设备运行轨迹坐标图;
[0029]
图5为t3运动时刻下,智能移动设备运行轨迹坐标图;
[0030]
图6为t4运动时刻下,智能移动设备运行轨迹坐标图;
[0031]
图7为t5运动时刻下,智能移动设备运行轨迹坐标图;
[0032]
图8为t6运动时刻下,智能移动设备运行轨迹坐标图;
[0033]
图9为t7运动时刻下,智能移动设备运行轨迹坐标图。
具体实施方式
[0034]
下面结合附图对本发明进行具体描述,如图1和图2所示,一种智能移动设备通过狭窄通道的方法,设定m条模拟路径,每条路径记录的时刻个数为n,通过在每条路径上使每个时刻f(x)的变化率最大,且下一个时刻的f(x)趋向于0,来确定智能移动设备通过狭窄通道的最优路径,具体公式如下:
[0035][0036]
根据雷达的工作原理,我们设定每个运动时刻t有着对应的航向角α
l
和航向角αr,所述每个航向角α
l
和航向角αr对应相应的距离信息,所述距离信息为智能移动设备底盘的中心点o到a或b的距离。所述a或b为每个运动时刻t雷达通过所述距离信息检测到障碍物上的两个点。
[0037]
其中,所述s
l’和所述s
r’为每个运动时刻t,智能移动设备行进过程中遇到的障碍物与分割线段l
割
、线段pa和线段pb在航向角α
l
和航向角αr夹角范围内包含松弛间隔d围成的面积;所述分割线段l
割
为智能移动设备在行进状态中,通过雷达检测到障碍物上的两个点a和b连成的线段ab与中心线l的交点p与智能移动设备底盘的中心点,也就是坐标原点o的连线;所述航向角α
l
为障碍物检测点a和坐标原点o之间连接的线段与中心线l之间的夹角;所述航向角αr为障碍物检测点b和坐标原点o之间连接的线段与中心线l之间的夹角;所述航向角α
l
和航向角αr与障碍物之间的间距成正比,间距越窄,航向角α
l
和航向角αr越小。
[0038]
所述线段pa和所述线段pb分别为交点p到障碍物上的两个点a和b之间的距离;所述松弛间隔d为平行于智能移动设备底盘正向前进的中心线l的直线与中心线l的间隔距离,松弛间隔的加入是为了使面积的变化计算更平滑,保证机器人航向不发生重大变化的时候,尽可能的往我们所期望的方向旋转。松弛间隔会使面积较大的部分更快的变小,而使较小的面积更慢的变小,这样会让两侧面积的比值更接近,从而避免某一侧对角度影响的权重特别大,让智能移动设备保持直行。
[0039]
所述s
l’和s
r’的计算条件如下:
[0040]
a:sr>s
l
时,s
r’=sr-sd,s
l’=s
l
+sd;
[0041]
b:sr<s
l
时,s
r’=sr+sd,s
l’=s
l
-sd;
[0042]
所述s
l
和sr为为每个运动时刻t,智能移动设备行进过程中遇到的障碍物与分割线段l
割
、线段pa和线段pb在航向角α
l
和航向角αr夹角范围内围成的面积;所述s
l
与sr面积比为1,可以使智能移动设备不会碰撞到障碍物,保持在障碍物之间行走,因为两侧的面积代表的是底盘距离障碍物的远近的权重。这个会影响小车的旋转速度。哪边大就往那边增加旋转速度,所以当比值为1,说明两侧距离障碍物相当,即处在中间位置。
[0043]
所述sd的计算公式为sd=d*l
割
。设定|sr-s
l
|>2*d,为了使航向角α
l
和航向角αr在加入松弛间隔得前后保持一致。所述障碍物在s
l
、sr、s
l’和s
r’内部时,所要计算的面积为多边形的面积。使用距离障碍物的面积,来表示障碍物离智能移动设备距离远近的权重,从而代替障碍物最近的一个点作为距离智能移动设备远近的表示,因为有的时候障碍物并不是方形的,有的是椭圆形,多边形等等,这个时候计算面积就不能只用三角形面积速算公式,而事实上面积的计算是有现成的工具包的,无论是三角形,多边形或者椭圆形等都能计
算出一个近似的面积的数值。因此为了方便实验,我们以三角形为例即可。根据障碍物的形状,需要使用三角形或多边形面积计算公式,在遇到复杂不规则的障碍物时需要计算近似值。
[0044]
所述智能移动设备可以是消杀机器人,图书馆机器人,送餐机器人和其他服务型机器人。
[0045]
通过上述一种智能移动设备通过狭窄通道的方法对智能移动设备运行轨迹进行测试,所选智能移动设备为送餐机器人,起点为坐标原点,测试实际环境参数如下:过道间距(障碍物之间的距离):55cm;过道长度:10m;送餐机器人小车的底盘大小:40cm*55cm;雷达测距范围:25m。
[0046]
每个运动时刻t,表示为t1、t2、t3...,下标数字表示移动次数。经测试各个运动时刻t,即送餐机器人小车移动的次数运行轨迹坐标如下:图3、[x:0.545,y:-0.266];图4、[x:0.773,y:-0.387];图5、[x:1.020,y:-0.570];图6、[x:1.210,y:-1.180];图7、[x:1.220,y:-2.020];图8、[x:1.220,y:-3.270];图9、[x:1.220,y:-4.740]。通过图3-图9智能移动设备的运行轨迹和坐标参数,可以看出,采用本发明一种智能移动设备通过狭窄通道的方法可以使得小车在运行过程全程中作出正确的运行轨迹,选取最优路径,可以在障碍物之间保持直行,不会产生碰撞。
[0047]
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1