一种基于非奇异快速终端滑模的变桨控制方法
1.本发明涉及风力发电领域,尤其是涉及一种基于非奇异快速终端滑模的变桨控制方法。
背景技术:
2.随着风电机组大型化的发展,风轮直径也在不断增大。尤其是风轮直径增加导致风轮叶片承受来流时变、风切变、塔影效应等影响产生的不平衡载荷愈加明显,引起桨叶产生大范围的挥舞和摆振,严重影响到风电机组关键部件的机械应力和疲劳寿命。
3.独立变桨距控制的每个桨叶都由独立的变桨距执行机构控制,按照各桨叶所处不同位置和不同风速分别进行调节,不仅能跟踪实现最大风能的捕获和稳定发电机的输出功率,而且能有效减小桨叶的拍打震动以及风机的其他扰动影响,从而大幅提高风机的稳定性和耐疲劳寿命。
4.目前,有独立变桨控制策略较多采用基于智能算法的pid控制,这种方法使得计算量大大增加,并且对于风速实时变化风电机组而言,将导致风电机组频繁地变桨,这将大大增加机组地疲劳载荷,降低其使用寿命。
5.针对以上问题,亟需设计一种变桨控制方法,从而实现捕获最大风能和稳定发电机的输出功率,提高风机的稳定性和耐疲劳寿命。
技术实现要素:
6.本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种风机稳定性高和耐疲劳寿命长的基于非奇异快速终端滑模的变桨控制方法。
7.本发明的目的可以通过以下技术方案来实现:
8.根据本发明的第一方面,提供了一种基于非奇异快速终端滑模的变桨控制方法,该方法包括以下步骤:
9.步骤s1、将气动载荷非线性模型在稳态工作点附近进行线性化,构建风机线性化模型;
10.步骤s2、基于风轮转速ω、叶片根部载荷m
yi
和叶片方位的控制输入,采用非奇异快速终端滑模nftsm控制器对风机进行功率控制和载荷协同控制,得到每个风机浆叶的桨距角。
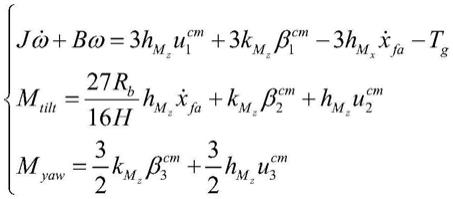
11.优选地,所述步骤s1中的风机线性化模型为:
[0012][0013]
其中,ω为风轮转速,b为等效阻尼系数,tg为发电机转矩,j为总的风轮转动惯量,mtilt
为倾覆力矩,m
yaw
为偏航力矩;β
icm
和u
icm
分别为变换到轮毂固定坐标系上的第个i叶片对应的桨距角和风速,x
fa
为塔架顶部前后方向位移,rb为风轮半径,h为塔架高度;h
mx
、h
mz
和k
mx
、k
mz
分别为叶片根部弯矩对风速和桨距角的导数,下标m
x
表示为塔筒前后弯曲力矩,下标mz表示为叶根挥舞力矩。
[0014]
优选地,所述步骤s2具体为:
[0015]
所述功率控制具体为:以风轮转速ω为输入信号,并与转速参考信号ω
*
做差得到误差信号给到nftsm转速控制器,得到一个桨距角输出信号β
1cm
;
[0016]
所述载荷控制具体为:以叶片根部载荷m
yi
和叶片方位作为输入,经过变换得到轮毂固定坐标系下的倾覆力矩m
tilt
和偏航力矩m
yaw
,并于分别与倾覆力矩参考信号m
*tilt
和偏航力矩参考信号m
*yaw
做差得到误差信号,分别给到nftsm倾覆力矩控制器以及nftsm偏航力矩控制器,得到桨距角输出信号β
2cm
和β
3cm
,并将这两个信号经过逆变换得到叶片旋转坐标系下的桨距角信号δβi(i=1,2,3),最终得到第i个桨叶的桨距角为β
i*
=δβi+β
1cm
(i=1,2,3)。
[0017]
优选地,所述载荷控制中的变换为coleman变换。
[0018]
优选地,所述非奇异快速终端滑模nftsm控制器的滑模面为:
[0019][0020]
其中,e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为正奇数,且满足2》m/n》1。
[0021]
优选地,所述nftsm转速控制器具体为:
[0022]
nftsm转速控制器的滑模面为:
[0023][0024]
其中,e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为满足2》m/n》1的正奇数;
[0025]
nftsm转速控制器的滑模控制律为:
[0026][0027]
其中,h(s
ω
)为双曲正切函数,表达式为h(s
ω
)=tanh(s
ω
);η》0;ω
*
表示参考的转速。
[0028]
优选地,所述nftsm倾覆力矩控制器具体为:
[0029]
nftsm倾覆力矩控制器的滑模面为:
[0030][0031]
其中,e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为满足2》m/n》1的正奇数;
[0032]
nftsm倾覆力矩控制器的滑模面控制律为:
[0033][0034]
其中,为双曲正切函数,表达式为η
》0;表示参考的倾覆力矩。
[0035]
优选地,所述nftsm偏航力矩控制器具体为:
[0036]
nftsm偏航力矩控制器的滑模面为:
[0037][0038]
其中,e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为正奇数,且满足2》m/n》1;
[0039]
nftsm偏航力矩控制器的滑模面控制律为:
[0040][0041]
其中,为双曲正切函数,表达式为|,η》0;表示参考的偏航力矩。
[0042]
根据本发明的第二方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现任一项所述的方法。
[0043]
根据本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现任一项所述的方法。
[0044]
与现有技术相比,本发明具有以下优点:
[0045]
1)本发明采用的非奇异快速终端滑模不仅收敛速度快,而且有效抑制抖振,动态性能优越,是一种可靠的变桨控制方法;
[0046]
2)本发明中使用的nftsm控制的动态性能优越,能够有效地将输出功率稳定在额定功率,并且采用了双曲正切函数能够有效降低抖振,对于大型风电机组而言,降低了关键部件的疲劳载荷,延长了使用寿命。
附图说明
[0047]
图1为本发明的基于nftsmc的功率与载荷协同控制框图;
[0048]
图2为nftsm转子速度控制框图。
具体实施方式
[0049]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0050]
实施例
[0051]
本实施例提供了一种基于非奇异终端滑模的变桨控制方法,该方包括载荷控制模块和转速控制模块;
[0052]
所述转速控制模块的控制过程具体为:以风轮转速ω为输入信号,并与转速参考信号ω
*
做差得到误差信号给到nftsm控制器,得到一个桨距角输出信号β
1cm
;
[0053]
所述载荷控制模块的控制过程具体为:以叶片根部载荷m
yi
和叶片方位作为输
入,经过coleman变换得到轮毂固定坐标系下的倾覆力矩m
tilt
和偏航力矩m
yaw
,并于分别与倾覆力矩参考信号m
*tilt
和偏航力矩参考信号m
*yaw
做差得到误差信号给到nftsm控制器,分别得到桨距角输出信号β
2cm
和β
3cm
,并将这两个信号经过coleman逆变换得到叶片旋转坐标系下的桨距角信号δβ1、δβ2、δβ3,最终得到第个i桨叶的桨距角为β
i*
=δβi+β
1cm
(i=1,2,3)。
[0054]
接下来,对本技术的方法进行详细介绍。
[0055]
1、风机线性化模型
[0056]
大型风电机组的空气动力学特性呈强非线性。为了简化分析,将桨叶视为刚性叶片,并对气动载荷非线性模型在稳态工作点附近进行线性化,可得线性周期时变模型。利用coleman变换,可实现风轮旋转坐标系与轮毂固定坐标系之间的变换,从而可将周期时变模型转换为线性定常模型:
[0057][0058]
其中,ω为风轮转速,b为等效阻尼系数,tg为发电机转矩,j为总的风轮转动惯量,m
tilt
为倾覆力矩,m
yaw
为偏航力矩;β
icm
和u
icm
分别为变换到轮毂固定坐标系上的第个i叶片对应的桨距角和风速,x
fa
为塔架顶部前后方向位移,rb为风轮半径,h为塔架高度;h
mx
、h
mz
和k
mx
、k
mz
分别为叶片根部弯矩对风速和桨距角的导数,下标m
x
表示为塔筒前后弯曲力矩,下标mz表示为叶根挥舞力矩。
[0059]
2、nftsm控制器原理
[0060]
选取的非奇异快速终端滑模面为:
[0061][0062]
其中,e为系统状态误差,系数α》0,b》0,a/b》1,m、n为正奇数,且满足2》m/n》1。令s=0,并对e求导可得:
[0063][0064]
若不考虑指数,则系统误差变化率由线性项(-e/γ)和非线性项(-α/γe
a/b
)决定。当系统状态变量远离平衡点,误差较大时,其中非线性项起主要作用,收敛速度接近幂次变化;当系统状态接近平衡点,误差较小时,其中线性项起主要作用,收敛速度接近线性变化,并且由于2》m/n》1,避免了在求取控制律上出现的奇异现象。
[0065]
3、nftsm转速控制器设计
[0066]
转速控制器框图见图2,转速控制器滑模面选取为:
[0067][0068]
式中:e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为正奇数,且满足2》m/n》1。
[0069]
将转速控制器的滑模控制律设定为:
[0070][0071]
其中,η》0。
[0072]
为了尽可能削减滑模控制所带来的抖振问题,采用双曲正切函数来代替符号函数。
[0073]
双曲正切函数的表达式为:
[0074][0075]
转速控制器的滑模控制律变为:
[0076][0077]
其中,ω
*
表示参考的转速。
[0078]
4、nftsm轮毂倾覆力矩控制器设计
[0079]
轮毂倾覆力矩控制器滑模面选取为:
[0080][0081]
式中:e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为正奇数,且满足2》m/n》1。
[0082]
将轮毂倾覆力矩控制器的滑模控制律设定为:
[0083][0084]
其中,η》0;表示参考的倾覆力矩。
[0085]
5、nftsm轮毂偏航力矩控制器设计
[0086]
轮毂偏航力矩控制器滑模面选取为:
[0087][0088]
式中:e为系统状态误差,系数α》0,γ》0,a/b》1,m、n为正奇数,且满足2》m/n》1。
[0089]
将轮毂偏航力矩控制器的滑模控制律设定为:
[0090][0091]
其中,d
my
≥|-3h
mz
ü
3cm
/2|,η》0;表示参考的偏航力矩。
[0092]
本发明电子设备包括中央处理单元(cpu),其可以根据存储在只读存储器(rom)中的计算机程序指令或者从存储单元加载到随机访问存储器(ram)中的计算机程序指令,来执行各种适当的动作和处理。在ram中,还可以存储设备操作所需的各种程序和数据。cpu、rom以及ram通过总线彼此相连。输入/输出(i/o)接口也连接至总线。
[0093]
设备中的多个部件连接至i/o接口,包括:输入单元,例如键盘、鼠标等;输出单元,
例如各种类型的显示器、扬声器等;存储单元,例如磁盘、光盘等;以及通信单元,例如网卡、调制解调器、无线通信收发机等。通信单元允许设备通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
[0094]
处理单元执行上文所描述的各个方法和处理。例如,在一些实施例中,方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元。在一些实施例中,计算机程序的部分或者全部可以经由rom和/或通信单元而被载入和/或安装到设备上。当计算机程序加载到ram并由cpu执行时,可以执行上文描述的方法的一个或多个步骤。备选地,在其他实施例中,cpu可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行方法。
[0095]
本文中以上描述的功能可以至少部分地由一个或多个硬件逻辑部件来执行。例如,非限制性地,可以使用的示范类型的硬件逻辑部件包括:场可编程门阵列(fpga)、专用集成电路(asic)、专用标准产品(assp)、芯片上系统的系统(soc)、负载可编程逻辑设备(cpld)等等。
[0096]
用于实施本发明的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
[0097]
在本发明的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、光纤、便捷式紧凑盘只读存储器(cd-rom)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
[0098]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1