一种带双轴SADA卫星的模态频率计算方法与流程
一种带双轴sada卫星的模态频率计算方法
技术领域
1.本发明涉及航天器姿态控制技术领域,具体涉及一种带双轴sada卫星的模态频率计算方法。
背景技术:
2.现代卫星为实现高精度遥感探测,除了平台需要有足够的指向精度与稳定度,还要保证有效载荷的光轴指向精度和稳定度。但平台常带有大型挠性太阳帆板、天线等挠性附件,具有整星自由度多、挠性大、低频模态密集、模态耦合程度高、结构阻尼小等特点。太阳帆板驱动系统(solar array drive system,sads)一般由太阳帆板及其驱动装置(solar array drive assembly,sada)组成。sada内部激扰因素会产生附加扰动力矩,挠性体一旦受到这种周期性激振力的作用,其振动持续时间就会增长,还会与其它部件产生耦合振动,使卫星姿态控制稳定性变差。
3.抑制挠性振荡的最简易方法是压缩闭环控制回路的带宽,使系统非约束模态频率位于控制带宽之外。带有双轴sada驱动挠性帆板的刚柔耦合卫星,其帆板振动基频低、质量相对较大,并且有较大翘角,星体的转动惯量会出现周期性变化。
4.因此针对带有双轴sada驱动挠性帆板的刚柔耦合卫星的挠性抑制控制律设计问题,需要设计一种非约束模态频率的计算方法,为卫星动力学频谱规划和控制系统设计提供输入。
技术实现要素:
5.为了解决上述问题,本发明提供一种带双轴sada卫星的模态频率计算方法。
6.本发明为解决技术问题所采用的技术方案如下:
7.一种带双轴sada卫星的模态频率计算方法,包括如下步骤:
8.s1、采用混合坐标法建立带挠性帆板刚柔耦合卫星动力学方程,并线性化该刚柔耦合卫星动力学方程;建立sada驱动挠性帆板动力学方程,并线性化该sada驱动挠性帆板动力学方程;
9.s2、将线性化后的刚柔耦合卫星动力学方程采用拉普拉斯变换处理,得到卫星结构动力学特征方程,将线性化后的sada驱动挠性帆板动力学方程采用拉普拉斯变换处理,得到sada驱动挠性帆板的动力学特征方程;
10.s3、解sada驱动挠性帆板的动力学特征方程得到sada与挠性帆板系统第k阶非约束模态频率ω
′k与阻尼比ξ
′k,根据ω
′k与ξ
′k求解卫星结构动力学特征方程得到卫星系统第k'阶非约束模态频率ω
k'
与阻尼比ζ
k'
。
11.本发明的有益效果是:
12.本发明的一种带双轴sada卫星的模态频率计算方法,是针对带有双轴sada驱动挠性帆板的刚柔耦合卫星的挠性抑制控制律设计问题提出的新方法,是一种非约束模态频率的计算方法,为卫星动力学频谱规划和控制系统设计提供输入。本发明将sada与帆板作为
整体,其系统的模态频率与阻尼比更接近真实,从而计算出的卫星非约束模态频率更具有参考意义。
附图说明
13.图1为带双轴sada的卫星示意图。
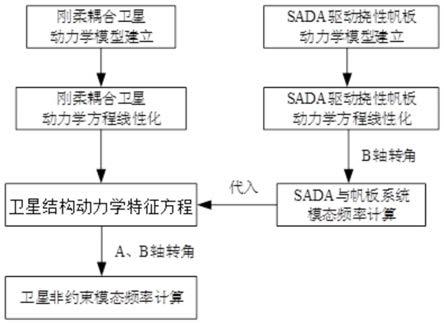
14.图2为本发明的一种带双轴sada卫星的模态频率计算方法的流程图。
15.图3为本发明的一种带双轴sada卫星的模态频率计算方法的太阳帆板前5阶振型图。
16.图4为本发明的一种带双轴sada卫星的模态频率计算方法计算的卫星带单个帆板时的非约束模态频率图。
17.图5为本发明的一种带双轴sada卫星的模态频率计算方法计算的卫星带双侧帆板时的非约束模态频率图。
具体实施方式
18.下面结合附图和实施例对本发明做进一步详细说明。
19.本发明一种带双轴sada卫星的模态频率计算方法可以计算多个帆板时的非约束模态频率。
20.卫星带有双侧帆板时的示意图如图1所示,卫星本体b固连于卫星的obxbybzb直角坐标系为卫星本体坐标系,坐标原点ob在卫星的质心处,+xb轴与卫星飞行方向同向,+zb轴垂直于卫星对接环与运载器过渡段对接面,指向光学相机,+yb轴按右手法则确定。对地定向无姿态偏差时,与卫星轨道坐标系重合。sada-a轴用于驱动帆板绕卫星本体坐标系yb轴以轨道角速度旋转,以跟踪太阳光线,转动范围为-180
°
~+180
°
;sada-b轴用于驱动帆板绕卫星本体坐标系xb轴摆动至固定角度,使太阳光线垂直照射于帆板,转动范围为0
°
~40
°
。帆板为两个,即挠性帆板a1和挠性帆板a2。
21.本发明一种带双轴sada卫星的模态频率计算方法的计算流程图如图2所示,包括以下步骤:
22.s1、采用混合坐标法建立带挠性帆板刚柔耦合卫星动力学方程,并线性化该刚柔耦合卫星动力学方程;建立sada驱动挠性帆板动力学方程,并线性化该sada驱动挠性帆板动力学方程;
23.s2、将线性化后的刚柔耦合卫星动力学方程采用拉普拉斯变换处理,得到卫星结构动力学特征方程,将线性化后的sada驱动挠性帆板动力学方程采用拉普拉斯变换处理,得到sada驱动挠性帆板的动力学特征方程;
24.s3、解sada驱动挠性帆板的动力学特征方程得到sada与挠性帆板系统第k阶非约束模态频率ω
′k与sada与挠性帆板系统第k阶非约束模态阻尼比ξ
′k,根据ω
′k与ξ
′k求解卫星结构动力学特征方程得到卫星系统第k'阶非约束模态频率ζ
k'
与卫星系统第k阶非约束模态阻尼比ζ
k'
。
25.下文对本发明进行详述,其中刚柔耦合卫星动力学方程和sada驱动挠性帆板动力学方程不区分先后关系,下面将s1按照步骤一至步骤四进行详述。
26.步骤一、建立带挠性帆板刚柔耦合卫星动力学模型
27.采用混合坐标法建立带挠性帆板卫星的姿态运动:中心刚体用通常描述刚体姿态的欧拉角表示,挠性附件则用离散的模态坐标表示。定义以下:
28.整星转动惯量矩阵is,整星相对惯性系角速度矢量ωs,第i个(i为正整数)挠性帆板相对中心刚体旋转角速度矢量ω
ia
,第i个sada与挠性帆板系统模态频率ω
′i,第i个sada与挠性帆板系统模态阻尼比ξi′
,第i个sada与挠性帆板系统模态坐标ηi,第i个挠性帆板转动惯量矩阵i
ia
,第i个挠性帆板自身振动与平动耦合系数b
itran
,第i个挠性帆板自身振动与转动耦合系数f
ia
,第i个挠性帆板振动与星体转动耦合系数f
is
,第i个挠性帆板转动与星体转动耦合系数r
ias
,第i个挠性帆板转动与整星转动耦合惯性并矢r
isa
,第i个挠性帆板在连接点处与星体的相互作用力矩t
ip
,帆板挠性振动耦合到星体上的力矩
×
表示该矢量的斜对称矩阵形式,表示ωs的斜对称矩阵形式,帆板旋转运动耦合到星体上的力矩飞轮控制力矩tw,飞轮角动量hw,整星所受外干扰力矩td;
29.带i个挠性帆板的刚柔耦合卫星动力学方程为
[0030][0031]
步骤二:刚柔耦合卫星动力学方程线性化
[0032]
卫星的在轨模态是其固有特性,与外部环境作用无关,动力学方程式(1)可简化为
[0033][0034]
对于小姿态角,可将动力学模型在期望轨迹附近线性化。小姿态角指卫星姿态处于基本稳定状态,此时的实际姿态角与期望姿态的偏差很小,在
±5°
以内。根据运动学方程,将星体角速度ωs转换成欧拉角的表达式为
[0035][0036]
其中,ω0表示卫星的轨道角速度。
[0037]
将(3)式代入(2)式得线性化后具有挠性帆板的刚柔耦合卫星的动力学模型。
[0038]
线性化后的带挠性帆板刚柔耦合卫星动力学模型为
[0039][0040]
其中,q表示坐标变量,l、m和n表示坐标变量q的系数矩阵。当卫星带有两个挠性帆板时,令坐标变量q=[θ η
1 η2]
t
。
[0041]
帆板取前n阶模态(n为正整数),系数矩阵均为2n+3阶方阵,表达式分别为
[0042][0043][0044][0045]
其中,en表示n阶单位矩阵。
[0046]
步骤三:建立sada驱动挠性帆板动力学模型
[0047]
建立两相混合式步进电机,在正余弦电流驱动下的动力学模型。定义如下:电机转子齿数zr,电机指令转角θc,电机机械转角θm,a相与b相两相电流幅值i0,a相电流ia=i0cos(zrθc),b相电流ib=i0sin(zrθc),电磁力矩系数km,定位力矩系数d,电机总电磁力矩te=-k(θ
m-θc)-dsin(4zrθm),k=kmi0zr,库仑摩擦力矩系数tc,粘滞阻尼系数σ,电机摩擦力矩负载力矩t
l
,电机绕转动轴的转动惯量jm,电机转动惯量矩阵j,sada减速比j,第i个挠性帆板的模态频率ωi,第i个挠性帆板的模态阻尼比ξi,第i个挠性帆板到星体的转换矩阵t
isa
,t
isa
随sada电机机械转角θm的变化而变化。sada负载力矩θm是θm拓展到三维的向量,θc是θc拓展到三维的向量,sada的转动方向是沿着星体的y轴,那么θm=[0 θ
m 0];θc=[0 θ
c 0]。
[0048]
sada驱动挠性帆板的动力学方程为
[0049][0050]
其中,η表示帆板模态坐标。
[0051]
步骤四:sada驱动挠性帆板动力学方程线性化
[0052]
令坐标变量τ=[θ
m ηi]
t
,将式(5)线性化后得
[0053][0054]
帆板取前n阶模态,此时n的取值等于步骤二中n的取值,坐标变量τ的系数矩阵均为n+3阶方阵,控制变量系数为n
×
3矩阵,表达式分别为
[0055]
[0056][0057]
其中,e表示单位矩阵。
[0058]
步骤五:卫星非约束模态频率解算
[0059]
方程(4)采用拉普拉斯变换处理后,得到卫星结构动力学特征方程:
[0060]
ls2+ms+n=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0061]
其中,s表示复变参量。
[0062]
同理,将方程(6)采用拉普拉斯变换处理后,得到sada驱动挠性帆板的动力学特征方程:
[0063][0064]
根据sada与挠性帆板参数也就是根据解方程(8)可得n+3对复数特征值λ
′k,从而由式
[0065][0066]
得到sada与挠性帆板系统第k阶非约束模态频率ω
′k与sada与挠性帆板系统第k阶非约束模态阻尼比ξ
′k,k为正整数,k表示sada与挠性帆板系统非约束模态频率的阶数,公式(9)中共n+3阶非约束模态频率,其中,λ'k表示公式(8)的第k阶特征值。
[0067]
将ω
′k、ξ
′k代入卫星结构动力学特征方程式(7)解得2n+3对复数特征值λ
k'
,进而
[0068][0069]
得到卫星系统第k'阶非约束模态频率ω
k'
与卫星系统第k'阶非约束模态阻尼比ζ
k'
,k'为正整数,k'表示卫星系统非约束模态频率的阶数,公式(10)中共2n+3阶非约束模态频率,其中,λ
k'
表示公式(9)的第k'阶特征值。
[0070]
本发明的效果:
[0071]
卫星动力学固有频率是客观存在的,在不受扰动的情况下本身不会振动,一旦有周期性扰动源与平台固有频率耦合,将引起共振,严重影响卫星姿态稳定度。研究具有多个挠性附件的整星系动力学统频率特性,是开展抑制挠性振动控制律设计的前提,对卫星姿态控制的发展具有重要意义。本发明的一种带双轴sada卫星的模态频率计算方法,是针对带有双轴sada驱动挠性帆板的刚柔耦合卫星的挠性抑制控制律设计问题提出的新方法,是一种非约束模态频率的计算方法,为卫星动力学频谱规划和控制系统设计提供输入。本发明将sada与帆板作为整体,其系统的模态频率与阻尼比更接近真实,从而计算出的卫星非约束模态频率更具有参考意义。
[0072]
现有技术中,文献[向明江,李梦宇,吕旺,杜继超.太阳翼不同转角的卫星在轨模态频率计算方法[j].航天器工程,2017,26(04):35-40.]中,利用混合坐标法建立了具有单侧帆板卫星结构动力学特征方程,计算了挠性帆板在不同转角时的模态频率,但模型忽略
了陀螺力矩项,且没有考虑sada本身的动力学特性。文献[施桂国,朱庆华,张子龙.一种主动抑制太阳帆板挠性振动的控制策略研究[j].上海航天,2016,33(03):61-66.]建立了步进电机驱动挠性帆板的耦合动力学模型,给出系统的模态频率与阻尼比,但没有考虑星体姿态运动对帆板模态的影响。本发明提出的卫星非约束模态频率计算方法,考虑到sada-b轴在大角度时的章动运动特点,在线性化模型中加入了姿态动力学的耦合力矩项is(具体为步骤二的系数矩阵p和r),考虑了星体姿态运动对帆板模态的影响,计算出的卫星非约束模态频率更具有参考意义。本发明能够计算出了卫星带有单侧帆板与双侧帆板时,系统非约束模态频率随sada转角的变化规律。
[0073]
下面对发明的应用进行具体阐述。
[0074]
卫星带有双轴sada,质量参数如表1和表2所示,帆板前5阶约束模态参数与振型如表3和图3所示,图3由hexagon软件得到。
[0075]
表1 卫星质量特性参数
[0076][0077]
表2 sada-a轴参数
[0078]
参数数值转子齿数50减速比100两相电流幅值i0/a0.6电机转动惯量jm/kg.cm20.2电磁力矩系数km/nm.a-1
0.3粘滞阻尼系数σ/kg.m2.s-1
0.05
[0079]
表3 太阳帆板挠性参数(前5阶)
[0080][0081]
令sada-a轴为0
°
,考虑卫星分别带有单侧帆板与双侧帆板,且b轴分别处于0
°
与40
°
状态下的模态频率,对比如表4和表5所示。
[0082]
表4 模态频率对比(sada-a、b轴角度均为0
°
时)
[0083][0084]
表5 模态频率对比(sada-a轴角度为0
°
、b轴角度为40
°
时)
[0085][0086]
当a轴角度从-180
°
~180
°
变化时,整星非约束模态频率的变化曲线如图4和图5所示。
[0087]
从计算结果可以看出:1)随着负载惯量的增加,电机模态频率减小;当sada-b轴处于40
°
时,电机驱动挠性负载比驱动刚性负载时,模态频率增加的较为明显。2)当b轴处于0
°
时,帆板与电机耦合后的第4阶模态频率有变化;当b轴处于40
°
时,帆板与电机耦合后的第2、3、4阶模态频率均有变化,这是由于帆板耦合系数决定的;3)卫星带有单侧帆板时,整星非约束模态各阶频率比帆板自身约束模态频率均有所提高,基频提高了约1倍;4)卫星带有双侧帆板时,整星非约束模态1、2阶频率基本不变,从第3阶开始呈降低趋势;5)当b轴角度保持不变时,随着a轴角度的增加,由于整星x和z轴的转动惯量变化较大,带单个帆板时的第1、2、4阶非约束模态频率呈现两个周期的波动;由于y轴转动惯量不变,故与扭转相关的第3、5阶非约束模态频率基本不变;6)当b轴为小角度时,整星各阶非约束模态频率随a轴角度的周期性变化幅度较大;当b轴为大角度时,该周期性变化幅度较小。
[0088]
计算结果表明:对于带有单侧帆板的卫星,非约束模态频率比约束模态频率高,尤其是前几阶模态上表现更为明显,基频约增加了1倍;非约束模态相当于降低了约束,使挠性附件振动更加自由。与此同时,帆板耦合系数对频率的影响有一定的对应关系:耦合系数越大,说明该阶模态与整星的耦合作用越强,容易受到星体的影响;而对于带有双侧帆板的卫星,非约束模态频率并没有较约束模态频率提高,可认为是在相邻约束模态基础上增加了新模态。
[0089]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1