一种转向系统及太阳能跟踪系统的制作方法
1.本实用新型涉及太阳能跟踪系统的结构改进技术领域,尤指一种转向系统及太阳能跟踪系统,应用在小型太阳能跟踪系统上。
背景技术:
2.在太阳能光伏应用方面,保持太阳能电池板随时正对太阳,让太阳光线随时垂直照射太阳能电池板,采用太阳能跟踪系统能显著提高太阳能光伏组件的发电效率。
3.由于地球的自转,相对于某一个固定地点的太阳能光伏发电系统,一年春夏秋冬四季、每天日升日落,太阳的光照角度时时刻刻都在变化,有效的保证太阳能电池板能够时刻正对太阳,发电效率才会达到最佳状态。截至目前,世界上通用的太阳能跟踪系统都需要根据安放点的经纬度等信息,计算一年中的每一天的不同时刻太阳所在的角度,将一年中每个时刻的太阳位置存储到plc、单片机或电脑软件中,都要靠计算该固定地点每一时刻的太阳位置以实现跟踪。采用的是电脑数据理论,需要根据地球经纬度地区的数据才能设定参数,一旦安装,就不便移动或装拆,每次移动完就必须重新计算参数、设定数据和调整各个参数;原理、电路、技术、设备都很复杂,非专业人士不能够随便操作。除此之外,太阳能跟踪系统采用联动机构跟踪太阳光的照射角度,通过联动结构调整多个太阳能光伏板的角度,常用的推杆式单轴联动系统中,转向机构施加给光伏组件的推力始终为水平方向,与摆臂成一定夹角,使得系统有效力臂降低,并且各个子跟踪机构之间的刚性连接降低了系统的保持性能,系统的抗风性能较差。
4.因此,本技术人致力于提供一种新型的转向系统和太阳能跟踪系统。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供一种新型的转向系统及太阳能跟踪系统,跟踪定位精确,有效提高了太阳能的利用率。其技术方案如下:
6.一种转向系统,包括回转机构和控制电路,回转机构由电源,x、y轴向步进电机及其驱动模块,x、y轴向丝杠及滑台,x、y轴向限位开关,光电隔离器组成。控制电路由主控制器模块,光热源阵列电路,数据选择电路,串口触摸屏组成。
7.所述转向系统进一步设计在于x轴向步进电机,丝杠及滑台,限位开关通过螺钉和螺帽固定连接成一体,y轴向步进电机,丝杠及滑台,限位开关通过螺钉和螺帽固定连接成一体,并通过螺钉固定于x轴向的滑台上。
8.所述转向系统进一步设计在于,步进电机采用二相57混合式步进电机,电机驱动模块的芯片是tb67s109a
9.所述转向系统进一步设计在于,主控制器模块采用意法半导体公司的cortex-m4系列的stm32f407igt6芯片,光热源阵列电路主要由固定电阻、光敏电阻和热敏电阻构成,使用时通过短路帽选择光敏电阻或热敏电阻,构成光照度跟踪或热源跟踪系统。
10.所述转向系统进一步设计在于,光热源阵列电路构成12个通路,并通过数据选择
电路被轮流切换至主控制器进行ad转换,数据选择电路由两片cd4051芯片构成。
11.一种太阳能跟踪系统,包括:上述转向系统及光伏组件或光热组件,所述光伏组件或光热组件固定连接在转向系统上。
12.所述太阳能跟踪系统进一步设计在于光伏组件或光热组件倾斜设置,固定连接在支架上,支架由舵机驱动装置实现在垂直方向的倾斜度的变化,舵机驱动装置固定在y轴向的滑台上。
13.转向系统根据光热源阵列电路中各个光敏电阻或热敏电阻上光通量及热量的不同,通过计算控制步进电机在驱动器的驱动下运行至光通量最高的那个光敏电阻对应的坐标上,或那个热量最高的热敏电阻对应的坐标上,使光伏组件接受最大的光照量,提高太阳能的转换效率。
14.当所有光敏传感器上的光通量低于某个阈值时,主控制器发送回原点信号,x、y轴向的步进电机在驱动信号下复位,如夜返-夜间返回原点,复位后为第二天的跟踪做好准备。这个阈值可以根据季节的不同而改变,也可以根据经验值由工作人员设定。
15.本实用新型与现有技术相比,具有以下优点和效果:本实用新型提供的太阳能跟踪系统,通过传感装置检测太阳的方位角和照度,控制器通过运算,判断,输出控制信号给步进电机驱动器,步进电机在驱动器的驱动下在丝杠上带动滑台即太阳能光伏板运动,以及时响应光通量的变化,提高光电转换效率,它能适应不同季节,地区及时间段光照强度的变化。步进电机能够定位精准并且运行平稳,无机械振动,并且整个转向系统都是金属支架,坚固耐用,具有很强的抗恶劣天气性能,应用于小型的光热跟踪系统有现实意义。
附图说明
16.图1是本实用新型的一种转向系统及太阳能跟踪系统的装置结构图。
17.图2是本实用新型的一种转向系统及太阳能跟踪系统的光热源阵列电路。
18.图3是本实用新型的一种转向系统及太阳能跟踪系统的主控制电路。
19.图4是本实用新型的一种转向系统及太阳能跟踪系统的xy轴接近开关电路。
20.图5是本实用新型的一种转向系统及太阳能跟踪系统的串口屏接口电路。
21.图6是本实用新型的一种转向系统及太阳能跟踪系统的光热跟踪系统串口屏界面布置图。
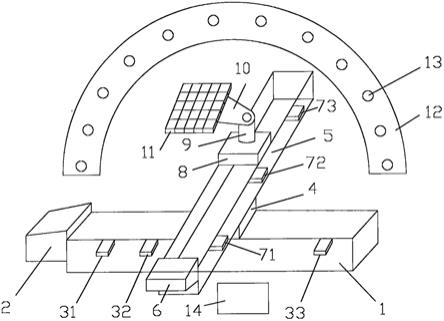
22.1-x轴向的丝杠,2-x轴向的步进电机,31、32、33-x轴丝杠上的限位开关,4-x轴向的滑台,5-y轴向的丝杠,6-y轴向的步进电机,71、72、73-y轴丝杠上的限位开关,8-y轴向的滑台,9-舵机驱动装置,10-支架,11-光伏元件,12-圆柱体,13-传感装置,14-控制电路。
具体实施方式
23.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获取的所有其他实施例,都属于本实用新型保护的范围。
24.请参照图1,本实用新型提供的太阳能跟踪系统,是光热和光伏发电过程中,最优化太阳光的使用,达到提高光电转换效率的机电系统,包括x轴向的丝杠1,x轴向的步进电
机2,布置在x轴丝杠上的限位开关31、32、33,x轴向的滑台4,它们通过固定连接装置构成一整体。y轴向的丝杠5,y轴向的步进电机6,布置在y轴丝杠上的限位开关71、72、73,y轴向的滑台8,它们通过固定连接装置构成一整体,并整体固定连接于x轴向的滑台4上。光伏元件11固定连接于支架10上,支架10固定连接在舵机驱动装置9上,舵机驱动装置9固定在y轴向的滑台8上,可由舵机改变光伏元件11的倾斜方向。传感装置13均匀分布在半圆形的圆柱体12上,数量根据需求增减,用于感知太阳光的光照度或热量,并将光照度或热量对应的值传递给主控电路,由主控电路通过运算、判断、再发命令给x、y轴向的步进电机控制器,从而带动光伏元件11跟踪到太阳光最强烈的位置。步进电机驱动器,数据选择电路,限位开关电路,串口触摸屏,光电隔离器与主控制器之间电连接。
25.光热源构成的传感装置阵列电路图中,参照图2,以第一组为例,每组由一个固定电阻r11、光敏电阻和热敏电阻r23组成,利用短路帽选择光敏电阻或热敏电阻,通过改变光敏电阻上的光照射量或热敏电阻所处环境的温度,就可以改变阻值,进而改变电压。v0~v11的输出电压连接由两片数据选择器cd4051构成的u9和u10的12个输入端,v0连接u9的13引脚x0,v1连接u9的14引脚x1,v2连接u9的15引脚x2,v3连接u9的12引脚x3,v4连接u9的1引脚x4,v5连接u9的5引脚x5,v6连接u9的2引脚x6,v7连接u9的4引脚x7,v8连接u10的13引脚x0,v9连接u10的14引脚x1,v10连接u10的15引脚x2,v11连接u10的12引脚x3,微处理器u4的ph2~ph5控制cd4051的c、b、a、inh,分别是微处理器u4的46引脚ph5连接元件u9和u10的11引脚a,微处理器u4的45引脚ph4连接元件u9和u10的10引脚b,微处理器u4的44引脚ph3连接元件u9和u10的9引脚c,微处理器u4的43引脚ph2连接元件u9的6引脚inh,并通过反相器u11a连接u10的6引脚inh。u9和u10的引脚3连接微处理器u4的40引脚pa0。
26.在主控制电路中,参照图3,微处理器u4的pi5、pd3、pd7控制x轴向的步进电机控制器,其中pi5控制脉冲输出,具体实现是u4的174引脚连接u8的第1引脚,并通过内部处理由u8的第7引脚输出到p1的第5引脚step1_pul-。pd3实现方向控制,具体实现是u4的145引脚连接光电耦合器u2的输入控制端,u2的输出控制端连接外部端口p1的第3引脚step1_dir-,pd7实现步进电机驱动器的使能控制,具体实现是u4的151引脚连接光电耦合器u5的输入端,u5的输出控制端连接外部端口p1的第1引脚step1_en-。微处理器u4的pi6、pd11、pf11控制y轴向的步进电机控制器,其中pi6控制脉冲输出,具体实现是u4的175引脚连接u8的第4引脚,并通过内部处理由u8的第6引脚输出到p3的第5引脚step2_pul-。pd11实现方向控制,具体实现是u4的99引脚连接光电耦合器u6的输入控制端,u6的输出控制端连接外部端口p3的第3引脚step2_dir-。pf11实现另一组步进电机驱动器的使能控制,具体实现是u4的59引脚连接光电耦合器u7的输入端,u7的输出控制端连接外部端口p3的第1引脚step2_en-。在外部接口p1端口的第2引脚step1_en+、第4引脚step1_dir+、第6引脚step1_pul+接电源vcc,外部接口p3端口的第2引脚step2_en+、第4引脚step2_dir+、第6引脚step2_pul+接电源vcc。
27.丝杠是将步进电机的角位移转换为线位移的部件,为防止丝杠在运动过程中滑台与边沿碰撞导致损坏,在x轴和y轴上都设置有限位开关。当没有物体靠近时,输出信号为高组态,当有金属物体靠近时,输出信号为高电平vcc。由于输出信号vcc远大于开发板的+5v电源,因此采用光电隔离器,参照图4所示。
28.在x轴方向,按顺序在丝杠上的负极限、原点、正极限位置上布置接近开关,元件p5
的引脚1是负极限输入控制端,输出高电平有效,并通过u12光电耦合器得到pg0的高低电平,元件p5的引脚3是原点输入控制端,输出高电平有效,并通过u12光电耦合器得到pg1的高低电平,元件p5的引脚5是正极限输入控制端,输出高电平有效,并通过u12光电耦合器得到pg2的高低电平;在y轴方向,元件p5的引脚7是负极限输入控制端,输出高电平有效,并通过u12光电耦合器得到pg3的高低电平,元件p6的引脚1是原点输入控制端,输出高电平有效,并通过u16光电耦合器得到pg4的高低电平,元件p6的引脚3是正极限输入控制端,输出高电平有效,并通过u16光电耦合器得到pg5的高低电平。元件p5的第2脚、第4脚、第6脚、第8脚接gnd,元件p6的第2脚、第4脚接gnd。
29.为方便调试,设置一块串口触摸屏,串口屏接线比较简单,只需4根线就可完成,参照图5。它们分别是p4引脚1的vcc接电源、p4引脚2的hmi_rxd接微处理器u4的pd5引脚、p4引脚3的hmi_txd接微处理器u4的pd6引脚、p4引脚4的gnd接地。触摸屏上设置17个触点,能够实现设置参数、复位等功能,其布置界面参见图6。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1