一种管道清洗机器人控制系统的制作方法
1.本实用新型属于电气控制技术领域,具体涉及一种管道清洗机器人控制系统。
背景技术:
2.餐饮油烟管道积存油渍污垢后,不及时清理,不仅会影响到油烟机和管道的使用寿命,增加运营成本,同时造成污染,形成安全隐患。但是由于油烟管道架设在高空,而且管道内径很小,传统的清洗只能由身材瘦小的工人爬进管道进行,空间狭窄的工作环境和无法进入的垂直烟道造成了清洗困难,有的管道根本无法人工清洗。
3.管道清洗机器人作为一种有效的管道清洗设备,得到了越来越多的应用,不同于市面上轮式、蠕动式、螺旋驱动式和履带吸附式,支撑履带式具有很强的越障性能和拖链性能,在清洗过程中不需要频繁的调整其与管壁的位姿来保证清洗效果,因此大大提升了清洗效率。但是其结构较为复杂,很难小型化。
技术实现要素:
4.针对背景技术中提出的问题,本实用新型提供了一种小型化设计的支撑履带式管道清洗机器人控制系统,主要应用于油烟管道的清洗,并且能够适用于不同尺寸大小的排水管管径;具备人机交互功能,并且能够实时显示和存储管道内清洗视频,实现了电控系统网络化,降低了现场人员的劳动强度,高了管道清洗效率。
5.为实现上述目的,本实用新型提供如下技术方案:一种管道清洗机器人控制系统,包括管道机器人执行端控制系统、电控柜本地主控系统和人机交互系统,管道机器人执行端控制系统由检测单元、驱动单元、视觉单元和清洗单元组成;电控柜本地主控系统由主控单元、配电单元和存储单元组成;人机交互系统由按键组和显示屏组成;所述检测单元与主控单元通过modbus rtu协议进行通讯连接,所述驱动单元与主控单元通过canopen协议进行通讯连接,所述视觉单元与主控单元通过tcp协议进行通讯连接,所述人机交互系统与主控单元通过modbus rtu协议进行通讯连接。
6.优选的,所述检测单元由压力传感器、航向传感器和数字变送器组成。
7.优选的,所述驱动单元由四台步进电机和四台驱动器组成。
8.优选的,所述视觉单元由视觉摄像头和环形光源组成。
9.优选的,所述清洗单元由高压水枪和控制电磁阀组成。
10.优选的,所述主控单元由主控plc逻辑控制器和通讯模块组成。
11.优选的,所述配电单元由12v开关电源和24v开关电源组成。
12.优选的,所述存储单元由摄录机和固态硬盘组成。
13.与现有技术相比,本实用新型的有益效果是:通过视觉单元和存储单元,实现了机器人的可视化操作,并且实时监控作业全流程,并且能够存储作业过程,实现工作流程的全流程追溯;
14.通过具备运动控制功能plc的应用,保证了运动的精确性和稳定性,减少了系统震
动,从而保证了清洗质量;
15.通过驱动系统的一体化设计,减少了机器人本体空间,从而使机器人能够进入更加狭窄的管道中进行控制;
16.通过modbus rtu和canopen现场总线技术的应用,大大增加了控制距离和控制稳定性。
附图说明
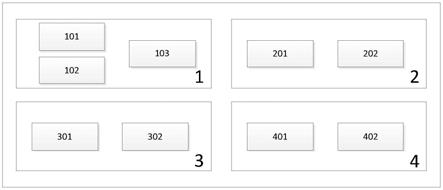
17.图1为本实用新型的管道机器人执行端控制系统示意图;
18.图2为本实用新型的电控柜本地主控系统示意图;
19.图3为本实用新型的人机交互系统示意图;
20.图中:1、检测单元;101、压力传感器;102、航向传感器;103、数字变送器;2、驱动单元;201、步进电机;202、驱动器;3、视觉单元;301、视觉摄像头;302环形光源;4、清洗单元;401、高压水枪;402、控制电磁阀;5、主控单元;501、主控plc逻辑控制器;502、通讯模块;6、配电单元;601、12v开关电源;602、24v开关电源;7、存储单元;701、摄录机;702、固态硬盘;8、人机交互系统;801、按键组;802、显示屏。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例1
23.如图1所示,本实用新型公开了一种管道清洗机器人控制系统,包括机器人执行端控制系统,包含有检测单元1、驱动单元2、视觉单元3和清洗单元4。
24.检测单元1由压力传感器101、航向传感器102和数字变送器103组成;其反馈信息是机器人行进过程中外部闭环控制的决策依据;其通过modbus rtu协议与主控单元5进行通讯。
25.驱动单元2由四台步进电机201和四台驱动器202组成;三台步进电机201用于驱动机器人,另一台步进电机201用于支撑变径;步进电机201和驱动器202通过一体化设计大大减少了空间体积,通过canopen总线实现了远距离控制;四台步进电机201通过多轴协同控制,保证机器人在管径变化和转弯时能够平稳运行。
26.视觉单元3由视觉摄像头201和环形光源202组成;实时监测管道内的情况,并通过tcp协议实时传输。
27.清洗单元4由高压水枪401和控制电磁阀402组成;控制电磁阀402通过组合控制高压水枪401的强度和方向,完成管道的清洗工作。
28.进一步的,所述检测单元1、视觉单元3采用dc12v供电,驱动单元2和清洗单元4采用dc24v供电。
29.实施例2
30.在实施例1的基础上,管道清洗机器人控制系统还包括电控柜本地主控系统,如图
2,包含有主控单元5,配电单元6和存储单元7。
31.主控单元5由主控plc逻辑控制器501、通讯模块502组成;主控单元5是整个系统的控制核心,采用具备运动控制功能的plc逻辑控制器,通讯模块502作为plc控制器的附件,向其它控制单元发送控制指令和接收它们的反馈信息。
32.配电单元6由12v开关电源601和24v开关电源602组成;是整个系统电力供给单元。
33.存储单元7由摄录机701和固态硬盘702组成;实时存储视觉单元3传输的视频信息。
34.实施例3
35.在实施例1和2的基础上,管道清洗机器人控制系统还包括人机交互系统8,包含按键组801和显示屏802组成;如图3,实时显示视觉单元3传输的视频信息,并控制机器人进行作业。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种管道清洗机器人控制系统,其特征在于:包括管道机器人执行端控制系统、电控柜本地主控系统和人机交互系统(8),管道机器人执行端控制系统由检测单元(1)、驱动单元(2)、视觉单元(3)和清洗单元(4)组成;电控柜本地主控系统由主控单元(5)、配电单元(6)和存储单元(7)组成;人机交互系统(8)由按键组(801)和显示屏(802)组成;所述检测单元(1)与主控单元(5)通过modbus rtu协议进行通讯连接,所述驱动单元(2)与主控单元(5)通过canopen协议进行通讯连接,所述视觉单元(3)与主控单元(5)通过tcp协议进行通讯连接,所述人机交互系统(8)与主控单元(5)通过modbus rtu协议进行通讯连接。2.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述检测单元(1)由压力传感器(101)、航向传感器(102)和数字变送器(103)组成。3.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述驱动单元(2)由四台步进电机(201)和四台驱动器(202)组成。4.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述视觉单元(3)由视觉摄像头(301)和环形光源(302)组成。5.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述清洗单元(4)由高压水枪(401)和控制电磁阀(402)组成。6.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述主控单元(5)由主控plc逻辑控制器(501)和通讯模块(502)组成。7.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述配电单元(6)由12v开关电源(601)和24v开关电源(602)组成。8.根据权利要求1所述的一种管道清洗机器人控制系统,其特征在于:所述存储单元(7)由摄录机(701)和固态硬盘(702)组成。
技术总结
本实用新型公开了一种管道清洗机器人控制系统,包括管道机器人执行端控制系统、电控柜本地主控系统和人机交互系统,管道机器人执行端控制系统由检测单元、驱动单元、视觉单元和清洗单元组成;电控柜本地主控系统由主控单元、配电单元和存储单元组成;人机交互系统由按键组和显示屏组成;通过视觉单元和存储单元,实现了机器人的可视化操作,并且实时监控作业全流程,并且实现工作流程的全流程追溯;通过具备运动控制功能PLC的应用,保证运动的精确性和稳定性,保证了清洗质量;通过驱动系统的一体化设计,减少了机器人本体空间,从而使机器人能够进入更加狭窄的管道中进行控制;通过Modbus RTU和Canopen现场总线技术的应用,增加了控制距离和控制稳定性。增加了控制距离和控制稳定性。增加了控制距离和控制稳定性。
技术研发人员:陈朋威 李靖 吴秀利
受保护的技术使用者:陕西利秦智诺机器人科技有限公司
技术研发日:2021.08.16
技术公布日:2022/1/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1