一种基于小型爪式管道智能检测车的控制系统的制作方法
1.本实用新型属于管道检测领域,具体涉及一种基于小型爪式管道智能检测车的控制系统。
背景技术:
2.随着我国经济的高速发展,管道运输在国民经济、国防工业生产、人们日常生活等方面都发挥着越来越重要的作用,石油、天然气、自来水管道等已经成为国民经济发展的命脉。而这些管道大多都是处于高压状态下运行,加上周围环境对管道的腐蚀以及自身的老化,接口连接不紧密,以及受到路面过高的载荷,使得管道的局部应力过大,产生扭曲断裂,发生泄漏的现象时有发生,如果这些泄漏不能及时发现,必将引起重大的资源浪费,严重的环境破坏和巨大的经济损失,甚至引发安全事故。所以及时有效的发现漏点是一项具有重大经济、社会、环境效益的工作。因此管道检测在工程中必要性极大。
3.常规管道检测采用人工检测,作业效率偏低,也存在一定误操作。同时,对于地下作业,存在一定人员安全风险。在射线作业的情况下,还存在对人体产生影响的风险。
技术实现要素:
4.本实用新型为有效解决上述问题,提供了一种基于小型爪式管道智能检测车的控制系统,设置有图像检测单元进行管道探伤,设置驱动模块用以调节小车运动方向,设置上位机用于远程控制小车作业,使小车在管道内作业,工作人员在外部操控,避免安全隐患,提高检测效率。
5.为了实现上述目的,本实用新型的技术方案是:
6.一种基于小型爪式管道智能检测车的控制系统,包括小车,所述小车包括车头、爪式驱动车和爪式挂车,所述爪式驱动车分别与车头和爪式挂车可拆卸连接,爪式驱动车用于带动车头和爪式挂车在管道内行进,所述车头设置有图像检测单元,所述图像检测单元用于检测焊缝质量,所述爪式驱动车包括多个驱动电机,所述驱动电机设置有驱动模块,所述驱动模块用于控制多个驱动电机差速、或正反转作业,所述驱动模块连接有控制单元,控制单元连接有上位机,所述上位机用于对控制单元远程发出控制指令,控制单元根据所述控制指令调节驱动模块控制驱动电机工作,
7.所述控制单元设置有检测单元,所述检测单元用于实时检测小车状态。
8.进一步地,所述图像检测单元包括分设于车头上下两端的摄像机和用于探伤的射线机以及补光灯,所述摄像机设置于车头前方,用于获取小车行进路径上焊缝图像信息,所述射线机随小车移动射线机的下方设置有升降机,所述升降机用于使射线机处于作业位置,射线机用于对焊缝质量进行检测,所述补光灯用于为图像检测单元提供亮度;
9.所述摄像机和射线机与控制单元通信连接,所述补光灯和升降机与控制单元的输出端连接。
10.进一步地,所述驱动模块包括驱动芯片,所述驱动芯片的输入端连接控制单元输
出端,驱动芯片的输出端连接驱动电机,多个所述驱动电机经驱动芯片连接电源形成回路。
11.进一步地,所述检测单元包括温度传感器、湿度传感器和gps模块,所述温度传感器用于检测控制单元温度,对应的所述湿度传感器的输出端连接有散热扇,温度传感器与控制单元的adc端口连接;
12.所述湿度传感器分设于车头、爪式驱动车和爪式挂车,湿度传感器用于检测管道内湿度参数,湿度传感器与控制单元的adc端口连接;
13.所述gps模块用于对小车进行定位,gps模块与控制单元通信连接。
14.进一步地,所述控制单元连接有声光报警单元,所述声光报警单元,所述声光报警单元用于根据控制单元发出的警报指令进行声光报警。
15.进一步地,所述控制单元包括cpu模块、存储模块和通信模块,所述cpu模块通过通信模块分别与摄像机、射线机和上位机通信;
16.所述通信模块包括wifi模块、4g模块、以太网模块、usb串口、rs232串口、蓝牙模块中的一种或多种组合。
17.进一步地,所述上位机包括手机、平板电脑、pc机中的一种或多种组合。
18.通过上述技术方案,本实用新型的有益效果为:
19.1.本实用新型设置有图像检测单元,所述图像检测单元用于检测焊缝质量,所述爪式驱动车包括多个驱动电机,所述驱动电机设置有驱动模块,所述驱动模块用于控制多个驱动电机差速、或正反转作业,所述驱动模块连接有控制单元,控制单元连接有上位机,所述上位机用于对控制单元远程发出控制指令,控制单元根据所述控制指令调节驱动模块控制驱动电机工作,
20.所述控制单元设置有检测单元,所述检测单元用于实时检测小车状态。
21.作业时,通过上位机对管道内的小车进行控制,利用图像检测单元对管道进行探伤作业,期间通过控制单元实现管道内部图像上传至上位机,同时通过上位机可以调节小车的运动方向实现倒车、前进、转弯等操作,无需人工近距离操作;
22.小车设置检测单元,检测单元用于检测小车行进距离,小车车轮状态,以及管道内状态,控制单元根据所述检测单元检测参数可以自动控制小车脱离当前位置,便于人工回收及控制,实现自动检测及安全检测。
附图说明
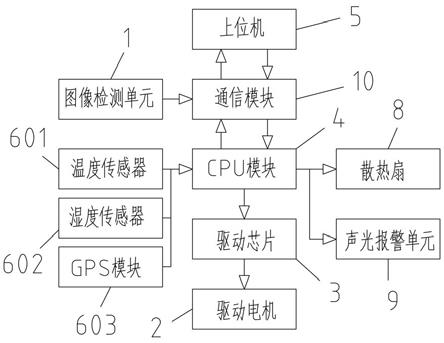
23.图1是本实用新型一种基于小型爪式管道智能检测车的控制系统的系统原理图;
24.图2是本实用新型一种基于小型爪式管道智能检测车的控制系统的结构示意图。
25.附图标号:1为图像检测单元,2为驱动电机,3为驱动芯片,4为cpu模块,5为上位机,6为检测单元,7为升降机,8为散热扇,9为声光报警单元,10为通信模块,101为摄像机,102为射线机,103为补光灯,601为温度传感器,602为湿度传感器,603为gps模块。
具体实施方式
26.下面结合附图和具体实施方式对本实用新型作进一步说明:
27.实施例1
28.如图1~2所示,一种基于小型爪式管道智能检测车的控制系统,包括小车,所述小
车包括车头(图中标号a)、爪式驱动车(图中标号b)和爪式挂车(图中标号c),所述爪式驱动车分别与车头和爪式挂车可拆卸连接,爪式驱动车用于带动车头和爪式挂车在管道内行进,所述车头设置有图像检测单元1,所述图像检测单元1用于检测焊缝质量,所述爪式驱动车包括多个驱动电机2,所述驱动电机2设置有驱动模块,所述驱动模块用于控制多个驱动电机2差速、或正反转作业,所述驱动模块连接有控制单元,控制单元连接有上位机5,所述上位机5用于对控制单元远程发出控制指令,控制单元根据所述控制指令调节驱动模块控制驱动电机2工作,
29.所述控制单元设置有检测单元6,所述检测单元6用于实时检测小车状态。
30.实施例2
31.为提高小车在管道内的检测能力,对图像检测单元1、驱动模块、检测单元6进行优化,具体的:
32.所述图像检测单元1包括分设于车头上下两端的摄像机101和用于探伤的射线机102以及补光灯103,所述摄像机101设置于车头前方,用于获取小车行进路径上焊缝图像信息,所述射线机102随小车移动射线机102的下方设置有升降机7,所述升降机7用于使射线机102处于作业位置,射线机102用于对焊缝质量进行检测,所述补光灯103用于为图像检测单元1提供亮度;
33.所述摄像机101和射线机102与控制单元通信连接,所述补光灯103和升降机7与控制单元的输出端连接。
34.作为一种可实施方式,所述驱动模块包括驱动芯片3,所述驱动芯片3的输入端连接控制单元输出端,驱动芯片3的输出端连接驱动电机2,多个所述驱动电机2经驱动芯片3连接电源形成回路。
35.作为一种可实施方式,所述检测单元6包括温度传感器601、湿度传感器602和gps模块603,所述温度传感器601用于检测控制单元温度,对应的所述湿度传感器602的输出端连接有散热扇8,温度传感器601与控制单元的adc端口连接;
36.所述湿度传感器602分设于车头、爪式驱动车和爪式挂车,湿度传感器602用于检测管道内湿度参数,湿度传感器602与控制单元的adc端口连接;
37.所述gps模块603用于对小车进行定位,gps模块603与控制单元通信连接。
38.作为一种可实施方式,所述控制单元连接有声光报警单元9,所述声光报警单元9,所述声光报警单元9用于根据控制单元发出的警报指令进行声光报警。
39.作为一种可实施方式,所述控制单元包括cpu模块4、存储模块和通信模块10,所述cpu模块4通过通信模块10分别与摄像机101、射线机102和上位机5通信;
40.所述通信模块10包括wifi模块、4g模块、以太网模块、usb串口、rs232串口、蓝牙模块中的一种或多种组合。
41.作为一种可实施方式,所述上位机5包括手机、平板电脑、pc机中的一种或多种组合。
42.结合上述实施例,对管道检测作业进行说明:
43.在本实施例中,所述摄像机101采用rmoncam/林柏视摄像头,最大支持1920*1080分辨率,可选70度,150度广角。支持红外。支持uvc协议;
44.射线机102为sf160型射线机,所述cpu模块4采用型号为mcimx6y2cvm05ab(工业
级)芯片,主频分别为 528mhz 和 800mhz,存储模块包括emmc:最小系统自带,8g空间。nand flash采用qspi接口拓展静态存储,采用eeprom记录相关板机信息,sd card用于调试或拷贝缓存信息;所述4g模块采用开发板上的4g通信模块移远的ec20cehclg minipcie-c,wifi模块采用开发板上的wifi+bt模块rtl8723,
45.以太网模块采用phy芯片microchip的ksz8081rnbia。对外采用poe接口,gps模块603采用维特智能 wtgps-200惯性导航传感器模组,驱动芯片3采用bld4810-n1t型直流无刷速度闭环驱动器;驱动电机2采用富兴fl57bla04型电机。
46.上位机5采用手机,所述手机设置有云端软件,云端通过php实现后台功能,前台通过html,js实现。
47.作业时,将小车放入管道,通过手机访问云端再由小车wifi模块连接cpu模块4,对cpu模块4输入启动指令,小车开设在管道内移动,通过图像检测单元1获取管道内的图像信息,工作人员结合射线机102检测参数判断管道是否存有损坏;
48.通过手机发送转弯等指令时,cpu模块4通过输出pwm信号控制驱动芯片3使驱动芯片3控制驱动电机2差速转弯,同样cpu模块4输出pwm信号通过驱动芯片3控制驱动电机2反转,小车倒车,从而完成小车在管道内的移动。
49.在移动期间检测单元6持续工作,其中gps模块603对小车持续定位,若将小车初始位置记为a小车此刻所在位置记为b,小车从点a到点b的集合中的每一个点连成小车的运动轨迹,所述运动轨迹记录在存储模块内;
50.结合驱动芯片3和驱动电机2的转速反馈,通过gps模块603检测数据判断小车行进是否存在打滑,空转问题;
51.当小车出现通信故障时,cpu模块4在离线状态下通过驱动芯片3控制驱动电机2照所述运动轨迹自动从管道内退出;
52.另外湿度传感器湿度传感器602持续工作,湿度传感器602用于检测管道内是否有积水, cpu模块40设置有湿度阈值,当湿度传感器602的检测值高于湿度阈值时,cpu模块4通过驱动芯片3控制驱动电机2反转,小车按照所述运动轨迹自动从管道内退出;
53.温度传感器601持续工作,检测cpu模块4温度, cpu模块4内设置有温度阈值,当温度传感器601检测值大于温度阈值时cpu模块4驱动散热扇8工作对cpu模块4进行散热。
54.在出现上述问题的同时,cpu模块4驱动声光报警单元9采取声光报警,提示工作人员进行处理。
55.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1