料罐转运车喂料控制装置的制作方法
1.本实用新型涉及料罐转运车技术领域,特别是涉及料罐转运车喂料控制装置。
背景技术:
2.料罐转运车在无水炮泥、耐材、焊材、焊剂、合金等行业广泛应用,将储料喂料到贮罐,贮罐置于转运车上, 在转运车到达目标位置后,需要对贮罐进行吊装操作,贮罐不仅起着储料的作用,很多时候同时还起着生产配料的作用,因此需对储料喂料到贮罐的量进行精确的控制。
技术实现要素:
3.针对上述情况,为克服现有技术之缺陷,本实用新型之目的在于提供料罐转运车喂料控制装置,能精确的控制储料喂料到贮罐的量。
4.其解决的技术方案是,包括进料量检测电路、速度检测电路、控制器、进料控制电路,所述进料量检测电路、速度检测电路均连接控制器,控制器输出控制信号到进料控制电路。
5.优选地,所述进料量检测电路包括电磁流量计h1,电磁流量计h1的引脚1连接电源+5v,电磁流量计h1的引脚2分别连接接地电容c2的一端、电阻r5的一端,电阻r5的另一端分别连接单片机u1的引脚3、电阻r6的一端、电阻r16的一端,电磁流量计h1的引脚3连接地,电阻r6的另一端分别连接运放ar2的反相输入端、电阻r8的一端、电容c3的一端,运放ar2的同相输入端通过电阻r7连接地,运放ar2的输出端分别连接电阻r8的另一端、电容c3的另一端、电阻r12的一端,电阻r12的另一端分别连接电阻r16的另一端、电阻r9的一端、接地电容c4的一端、单结晶体管t1的发射极,单结晶体管t1的第二基极连接电阻r11的一端,电阻r9的另一端、电阻r 11的另一端连接电源+5v,单结晶体管t1的第一基极分别连接接地电阻r10的一端、单片机u1的引脚11;
6.所述速度检测电路包括速度传感器h2,速度传感器h2的引脚1连接电源+5v,速度传感器h2的引脚2分别连接接地电容c1的一端、电阻r4的一端,电阻r4的另一端分别连接接地电阻r3的一端、运放ar1的同相输入端,运放ar1的反相输入端分别连接接地电阻r1的一端、电阻r2的一端,运放ar1的输出端和电阻r2的另一端连接单片机u1的引脚1。
7.本实用新型采用速度传感器h2检测进料电机的速度到单片机u1,电磁流量计实时检测储料喂料到贮罐的量到单片机u1,并经积分电路计算单位时间内储料喂料到贮罐的变化量,与实时检测储料喂料到贮罐的量进入触发电路,达到设定目标量时,触发导通,输出+5v中断信号到单片机u1,单片机u1输出pwm控制信号到三相逆变电路,精确控制进料电机速度,达到设定目标量时及时停转,实现精确的控制储料喂料到贮罐的量。
附图说明
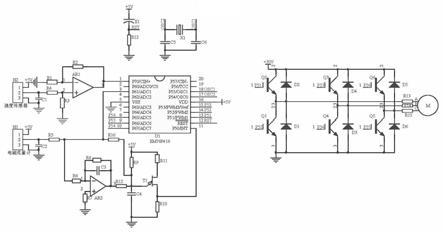
8.图1为本实用新型的电路原理图。
具体实施方式
9.有关本实用新型的前述及其他技术内容、特点与功效,在以下配合参考附图1对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
10.下面将参照附图描述本实用新型的各示例性的实施例。
11.实施例一,料罐转运车喂料控制装置,包括进料量检测电路、速度检测电路、控制器、进料控制电路,所述进料量检测电路采用电磁流量计实时检测储料喂料到贮罐的量,经滤波、限流后一路加到单片机u1的引脚3,另一路经积分电路计算单位时间内储料喂料到贮罐的变化量,与实时检测储料喂料到贮罐的量进入触发电路,达到设定目标量时,触发导通,输出+5v中断信号到单片机u1,速度检测电路采用速度传感器h2检测进料电机的速度,经滤波,再经放大器放大后进入单片机u1的引脚1,控制器根据实时检测的电机速度、储料喂料到贮罐的量结合触发电路预测达到设定目标量时的中断信号,输出pwm控制信号到进料控制电路,精确控制进料电机速度,达到设定目标量时及时停转,实现精确的控制储料喂料到贮罐的量,进料控制电路接收单片机的引脚13、引脚14、引脚15、引脚10、引脚9、引脚8输出的pwm信号,加到晶体管q1
‑
q6、二极管d1
‑
d6组成的三相逆变电路,输出占空比不同的pwm脉冲,改变晶体管开关状态和频率,实现电机m的a、b、c相绕组的供电电压的调节,进而控制电机的转速及启停。
12.实施例二,在实施例一的基础上,所述进料量检测电路采用电磁流量计实时检测储料喂料到贮罐的量,经电容c2滤波电阻r5限流后一路加到单片机u1的引脚3,另一路经运放ar2、电阻r6
‑
电阻r8、电容c3组成的积分电路计算单位时间内储料喂料到贮罐的变化量,与实时检测储料喂料到贮罐的量进入单结晶体管t1、电阻r9
‑
电阻r12组成的触发电路,达到设定目标量时,触发导通,输出+5v中断信号到单片机u1,单片机u1输出控制信号到进料控制电路,包括电磁流量计h1,电磁流量计h1的引脚1连接电源+5v,电磁流量计h1的引脚2分别连接接地电容c2的一端、电阻r5的一端,电阻r5的另一端分别连接单片机u1的引脚3、电阻r6的一端、电阻r16的一端,电磁流量计h1的引脚3连接地,电阻r6的另一端分别连接运放ar2的反相输入端、电阻r8的一端、电容c3的一端,运放ar2的同相输入端通过电阻r7连接地,运放ar2的输出端分别连接电阻r8的另一端、电容c3的另一端、电阻r12的一端,电阻r12的另一端分别连接电阻r16的另一端、电阻r9的一端、接地电容c4的一端、单结晶体管t1的发射极,单结晶体管t1的第二基极连接电阻r11的一端,电阻r9的另一端、电阻r 11的另一端连接电源+5v,单结晶体管t1的第一基极分别连接接地电阻r10的一端、单片机u1的引脚11;
13.所述速度检测电路采用速度传感器h2检测进料电机的速度,经滤波,再经运放ar1、电阻r1
‑
电阻r4组成的放大器放大后进入单片机u1的引脚1,为单片机精确控制进料电机速度提供依据,包括速度传感器h2,速度传感器h2的引脚1连接电源+5v,速度传感器h2的引脚2分别连接接地电容c1的一端、电阻r4的一端,电阻r4的另一端分别连接接地电阻r3的一端、运放ar1的同相输入端,运放ar1的反相输入端分别连接接地电阻r1的一端、电阻r2的一端,运放ar1的输出端和电阻r2的另一端连接单片机u1的引脚1。
14.实施例三,在实施例一的基础上,所述控制器采用型号为ms5540cm的单片机u1为控制核心,根据实时检测的电机速度、储料喂料到贮罐的量结合触发电路预测达到设定目
标量时的中断信号,输出pwm控制信号到三相逆变电路,精确控制进料电机速度,达到设定目标量时及时停转,实现精确的控制储料喂料到贮罐的量,单片机采用外部震荡来提供时钟信号,复位由电阻r12、电解电容e1组,内带pwm转换功能,包括单片机u1,单片机u1的引脚16连接电源+5v,单片机u1的引脚5连接地,单片机u1的引脚12分别连接接地电阻r12一端、电解电容e1负极,电解电容e1正极连接电源+5v,单片机u1引脚17分别连接晶振x1左端和电容c5上端,单片机u1引脚18分别连接晶振x1右端和电容c6上端,电容c5的下端和电容c6的下端均连接地。
15.实施例四,在实施例一的基础上,所述进料控制电路接收单片机的引脚13、引脚14、引脚15、引脚10、引脚9、引脚8输出的pwm信号,加到晶体管q1
‑
q6、二极管d1
‑
d6组成的三相逆变电路,输出占空比不同的pwm脉冲,改变晶体管开关状态和频率,实现电机m的a、b、c相绕组的供电电压的调节,进而控制电机的转速及启停,包括晶体管q1、q2、 q3、q4、 q5、q6,晶体管q1、q2、 q3、q4、 q5、q6的基极分别连接单片机u1的引脚13、引脚14、引脚15、引脚10、引脚9、引脚8,晶体管q2的集电极、晶体管q3的集电极、晶体管q6的集电极、二极管d2的负极、二极管d4的负极、二极管d5的负极均连接电源+30v,晶体管q1的发射极、晶体管q4的发射极、晶体管q5的发射极、二极管d1的正极、二极管d3的正极、二极管d6的正极均连接地,晶体管q2的发射极、晶体管q1的集电极、二极管d2的正极、二极管d1的负极连接电阻r13的一端,电阻r13的另一端连接电机m的a相绕组,晶体管q3的发射极、晶体管q4的集电极、二极管d4的正极、二极管d3的负极连接电阻r14的一端,电阻r14的另一端连接电机m的b相绕组,晶体管q6的发射极、晶体管q5的集电极、二极管d5的正极、二极管d6的负极连接电阻r15的一端,电阻r15的另一端连接电机m的c相绕组。
16.本实用新型具体使用时,采用电磁流量计实时检测储料喂料到贮罐的量,经滤波、限流后一路加到单片机u1的引脚3,另一路经积分电路计算单位时间内储料喂料到贮罐的变化量,与实时检测储料喂料到贮罐的量进入触发电路,达到设定目标量时,触发导通,输出+5v中断信号到单片机u1,采用速度传感器h2检测进料电机的速度,经滤波,再经放大器放大后进入单片机u1的引脚1,控制器根据实时检测的电机速度、储料喂料到贮罐的量结合触发电路预测达到设定目标量时的中断信号,单片机的引脚13、引脚14、引脚15、引脚10、引脚9、引脚8输出的pwm信号,加到晶体管q1
‑
q6、二极管d1
‑
d6组成的三相逆变电路,输出占空比不同的pwm脉冲,改变晶体管开关状态和频率,实现电机m的a、b、c相绕组的供电电压的调节,精确控制进料电机速度,达到设定目标量时及时停转,实现精确的控制储料喂料到贮罐的量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1