一种无人机自动飞行控制系统的制作方法
1.本实用新型涉及无人机的领域,尤其是涉及一种无人机自动飞行控制系统。
背景技术:
2.随着科学技术的不断发展,各种类型的无人机不断普及,例如,植保无人机、航拍无人机、救援无人机、运载无人机等,为人们的生产和生活带来了极大便利。
3.配电网无人机智能巡检平台计划依据无人机硬件特性,定制开发专用的无人机飞控软件,通过无线遥控装置同时实现无人机飞行进行线路巡检和数据采集功能。目前,无人机的飞行控制主要还是通过人工操作,但考虑这种模式可能会给日常巡检工作带来一定隐患,长时间的飞行控制操作,对于基层班组人员的飞机技术要求较高,难免会出现“炸机”事故。为提升飞行安全,行业迫切需要更加智能、更加安全、更加可控的巡检作业方式。因此无人机自动飞行控制技术是该平台未来发展的一项核心技术。
技术实现要素:
4.为了提升无人机的飞行安全,本实用新型提供一种无人机自动飞行控制系统。
5.本实用新型提供的一种无人机自动飞行控制系统采用如下的技术方案:
6.一种无人机自动飞行控制系统,包括移动勘测应用平台和无人机本体,所述移动勘测应用平台包括地面控制系统、gps指南针模块、惯性导航单元和磁罗盘设备,所述gps指南针模块和磁罗盘设备均与无人机本体通讯连接,所述惯性导航单元与地面控制系统通讯连接,所述地面控制系统包括基础飞控参数模块、遥控器模块、图传信道模块和配套云台模块。
7.通过采用上述技术方案,动勘测应用与无人机本体硬件飞控程序整合,实现在勘测应用中提供对无人机硬件的飞行规划及飞行控制功能,具体提供:基础飞控参数设置、遥控器模式设置、图传信道设置、配套云台设置。
8.配网无人机智能巡检系统飞控终端技术利用大疆开放的多旋翼无人机接口,通过gps指南针模块获取无人机的位置信息、惯性导航单元获取无人机飞行姿态,磁罗盘设备信号获取无人机当前航向,达到稳定操控无人机的目的,可获取无人机的图传信号、同时控制无人机执行拍照、录像等任务,提升了无人机的飞行安全。
9.可选的,所述图传信道模块包括发射端、接收端和显示端三部分。
10.通过采用上述技术方案,无人机上挂载的视频拍摄装置将采集的视频信号发射到安装在无人机上的图传信号发送器,然后由图传信号发送器的无线信号传送到地面的接收端,由接收端再通过hdmi传输到显示端(显示器或平板电视)。由此,操控者就能实时地监控到无人机航拍的图像。
11.可选的,所述遥控器模块为多旋翼无人机遥控器,所述多旋翼无人机遥控器与无人机本体通过天线连接。
12.通过采用上述技术方案,相比于传统的无人机遥控器,多旋翼无人机遥控器操作
方式更加简便,更加灵活,且功能更加完善。
13.可选的,所述基础飞控参数模块内设置有飞行半径、高度、速度、拍照位置及所有航点所拍摄照片的总数。
14.通过采用上述技术方案,通过控制任务区域内无人机飞行的半径、高度和速度等参数,可有效防止飞行高度过高或过低,导致无人机撞击地面、坠毁或拍摄不清等情况;且飞行速度的设置,可有效控制照片清晰度;另外,也可根据需要控制拍摄照片的总数,避免浪费或数据不足。
15.可选的,所述配套云台模块为三轴增稳航拍防抖云台。
16.通过采用上述技术方案,稳定平台作为给相机增稳的作用,它主要通过传感器感知机身的动作,通过电机驱动让相机保持原来的位置,抵消机身晃动或者震动的影响。实现了对航拍时的画面有全方位的稳定,保证画面的清晰稳定。
17.可选的,所述惯性导航单元包含三轴加速度计、三轴角速度计和气压高度计。
18.通过采用上述技术方案,加速度计检测无人机本体在载体坐标系统独立三轴的加速度信号,角速度计检测载体相对于检测角速度信号的导航坐标系,气压高度计检测无人机本体在坐标系中的高度,从而实现高精度感应飞行器姿态、角度、速度和高度。
19.可选的,所述gps指南针模块包含gps模块和指南针模块,所述gps模块和指南针模块通讯连接。
20.通过采用上述技术方案,由于配置有gps指南针模块,可以实现锁定经纬度和高度的精准定位。即使碰到有风或者其它外力的作用下,地面控制系统也能通过主控制单元发出的定位指令来自主控制飞行器以实现精准定位悬停。实现了精确确定飞行器的方向及经纬度,可对无人机进行失控保护,且实现无人机本体自动返航。
21.综上所述,本实用新型包括以下至少一种有益技术效果:
22.1.通过动勘测应用与无人机本体硬件飞控程序整合,实现在勘测应用中提供对无人机硬件的飞行规划及飞行控制功能,通过gps指南针模块获取无人机的位置信息、惯性导航单元获取无人机飞行姿态,磁罗盘设备信号获取无人机当前航向,达到稳定操控无人机的目的,可获取无人机的图传信号、同时控制无人机执行拍照、录像等任务,提升了无人机的飞行安全;
23.2.通过图传信道模块,使无人机上挂载的视频拍摄装置将采集的视频信号发射到安装在无人机上的图传信号发送器,然后由图传信号发送器的无线信号传送到地面的接收端,由接收端再传输到显示端(显示器或平板电视)。由此,操控者就能实时地监控到无人机航拍的图像;
24.3.通过选择三轴增稳航拍防抖云台,实现相机保持原来的位置,抵消
25.机身晃动或者震动的影响,达到了对航拍时的画面有全方位的稳定,保证画面的清晰稳定。
附图说明
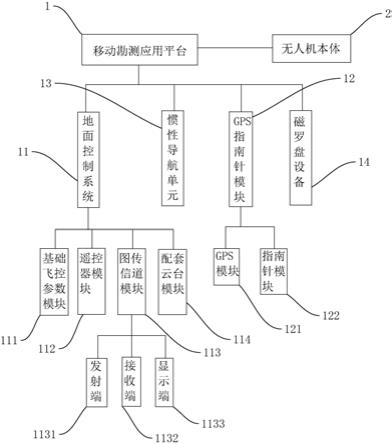
26.图1是本实用新型整体框架结构示意图。
27.附图标记说明:1、移动勘测应用平台;11、地面控制系统;111、基础飞控参数模块;112、遥控器模块;113、图传信道模块;1131、发射端;1132、接收端;1133、显示端;114、配套
云台模块;12、gps指南针模块;121、gps模块;122、指南针模块;13、惯性导航单元;14、磁罗盘设备;2、无人机本体。
具体实施方式
28.以下结合实施例对本实用新型作进一步详细说明。
29.实施例
30.本实用新型实施例公开一种无人机自动飞行控制系统。一种无人机自动飞行控制系统包括移动勘测应用平台1和无人机本体2,移动勘测应用平台1包括地面控制系统11、用于获取无人机本体2的位置信息的gps指南针模块12、用于获取无人机本体2飞行姿态的惯性导航单元13和用于获取无人机本体2当前航向的磁罗盘设备14,gps指南针模块12和磁罗盘设备14均与无人机本体2通讯连接,惯性导航单元13与地面控制系统11连接。
31.惯性导航单元13包含三轴加速度计、三轴角速度计和气压高度计,是高精度地感应飞行器姿态、角度、速度和高度的传感器集合体。
32.gps指南针模块12包含gps模块121和指南针模块122,用于精确确定飞行器的方向及经纬度。gps模块121和指南针模块122通讯连接,当飞行过程中,出现控制信号丢失,即无线遥控控制链路中断的情况,gps模块121在指南针模块122的指引下,能协助飞行控制系统能自动计划返航路线,实现自动返航和降落,使飞行或航拍更加安全可靠。
33.地面控制系统11包括基础飞控参数模块111、遥控器模块112、图传信道模块113和配套云台模块114。在基础飞控参数模块111中设置飞行所需的相关参数;遥控器模块112实现远程控制;而图传信道模块113将视频拍摄装置采集到的视频信号,经过一系列的处理后,转换成图像,方便操作者观看实景;配套云台模块114则可以保证摄影器的稳定性,防止因气流、狂风和暴雨等影响而使摄影器抖动,导致拍摄的图像不清晰。
34.基础飞控参数模块111内设置有飞行半径、高度、速度、拍照位置及所有航点所拍摄照片的总数等参数。从而实现无人机本体2安全、稳定、高效的飞行。
35.遥控器模块112为多旋翼无人机遥控器,多旋翼无人机遥控器与gps模块121通过天线连接。本技术中,多旋翼无人机遥控器具有视频录制功能、调整拍摄角度功能和切换模式功能,通过调节不同的档位,使无人机本飞得更稳,或实现精确悬停。
36.图传信道模块113包括发射端1131、接收端1132和显示端1133三部分。无人机图像传输系统就是将天空中处于飞行状态的无人机所拍摄的画面实时稳定的发射给地面无线图传遥控接收设备。发射端1131位于无人机上挂载的视频拍摄装置内,视频拍摄装置将采集的视频信号传输到安装在无人机上的图传信号发射端1131,然后由图传信号发射端1131的2.4ghz无线信号传送到地面的接收端1132,由接收端1132再通过hdmi传输到显示设备上(显示器或平板电视),或者是通过usb传输到手机与平板电脑上。由此,操控者就能实时地监控到无人机航拍的图像。
37.配套云台模块114为三轴增稳航拍防抖云台。本技术中,航拍防抖云台主要由无刷电机驱动,在水平、横滚、俯仰三个轴向对相机进行增稳,可搭载的摄影器材从小摄像头到gopro,再到微单/无反相机,甚至全画幅单反以及专业级电影机都可以。摄影器材越大,航拍防抖云台就越大,相应的机架也就越大。
38.以上均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡
依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1