基于STM32物联网侦察小车
基于stm32物联网侦察小车
技术领域
1.本实用新型设计智能侦察领域,具体涉及一种基于stm32物联网侦察小车。
背景技术:
2.随着微电子技术的快速发展,设备智能化越来越普及,智能程度越来越高。智能小车以及智能机器人不管在民用或者是军用领域都有特定应用场景,许多企业和国家都在积极地进行智能小车的研究和设计。侦察小车是在特定应用场景中的智能小车,属于移动机器人。
3.针对复杂的危险环境中,侦察小车能够进入人们无法去往的区域,以替代人工探索,在侦察任务中大大的保障了人员的生命和财产安全。在探测领域智能侦察小车具有重要意义,小车可以根据具体的应用场景搭配不同的采集设备,以代替传统人工进行收集数据。在智能家居应用领域,智能侦察小车可以用于模拟人为操控,远程监视家中环境并可控制家用电器,即使不在家中也能以第一视角查看周围环境,以最大程度上发挥智能家居的实际应用。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种基于stm32物联网侦察小车,实现在移动过程中进行多方位的图像采集,在很大程度上解决固定摄像头监控范围有限的问题。
5.为实现上述目的,本实用新型采用如下技术方案:
6.一种基于stm32物联网侦察小车,包括主控制器、无线模块、图像采集模块、二自由度舵机云台、电机控制系统和基础物理架构;主控制器与无线模块、图像采集模块、二自由度舵机云台、电机驱动模块分别连接。
7.进一步的,还设置有物联网控制平台服务器、个人服务器和移动终端;所述物联网控制平台服务器作为小车状态收集、命令执行中心;所述个人服务器作为图像传输处理以及控制页面部署平台;所述移动终端用于远程控制小车移动、云台旋转、图像画面实时监视
8.进一步的,所述主控制器采用stm32f407zgt6小型系统板。
9.进一步的,所述无线模块采用2块atk-esp8266无线模块,其中一个无线模块连接物联网控制平台服务器,用于同步小车状态以及状态切换;另一个无线模块连接个人服务器,用于独立传输图像数据,并支持在线固件包的下载更新和小车移动控制。
10.进一步的,所述二自由度云台系统包括一维平台和二维平台;所述一维平台采用ds3115mg双轴数字舵机实现0-270
°
水平可控角度,二维平台采用rds3115mg单轴数字舵机实现0-180
°
垂直可控角度。
11.进一步的,所述电机控制系统包括两块集成的l298n电机驱动模块、4台直流减速电机和霍尔测速编码器;所述两块集成的l298n电机驱动模块控制4台直流减速电机将主控制器输出的pwm波转换为电机的控制信号,并对电机进行调速。
12.进一步的,所述基础物理架构采用双层铝合金板作为底盘支撑,在底板和轮子之
间使用可调节减震悬挂,并使用4个麦克纳姆轮。
13.本实用新型与现有技术相比具有以下有益效果:
14.本实用新型采用摄像头、二自由度云台以及麦轮小车的设计搭配,结合云台舵机可控角大以及麦轮小车灵活性强的优点,实现在移动过程中进行多方位的图像采集,解决固定摄像头监控范围有限的问题;
附图说明
15.图1是本实用新型系统整体框图;
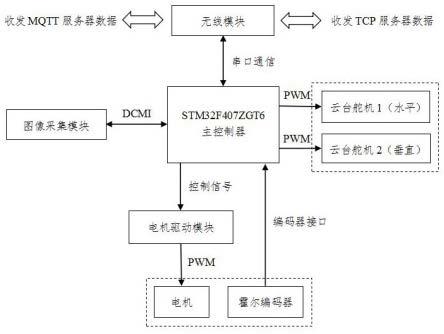
16.图2是本实用新型一实施例中小车硬件框图;
17.图3是本实用新型一实施例中小车整体硬件原理图;
18.图4是本实用新型一实施例中stm32f407zgt6小型系统板示意图;
19.图5是本实用新型一实施例中图像采集模块电路原理图;
20.图6是本实用新型一实施例中双l298n模块原理图;
21.图7是本实用新型一实施例中无线wi-fi模块原理图。
具体实施方式
22.下面结合附图及实施例对本实用新型做进一步说明。
23.请参照图1,本实用新型提供一种基于stm32物联网侦察小车,包括主控制器、无线模块、图像采集模块、二自由度舵机云台、电机控制系统和基础物理架构;主控制器与无线模块、图像采集模块、二自由度舵机云台、电机驱动模块分别连接。
24.参考图2,在本实施例中,侦察小车包括主控制器、无线模块、图像采集模块、二自由度舵机云台、电机控制系统和基础物理架构;主控制器与无线模块、图像采集模块、二自由度舵机云台、电机驱动模块分别连接。
25.优选的,参考图3,在本实施例中,各模块具体如下:
26.参考图4,主控制器系统:以stm32f407zgt6小型系统板作为核心控制器,主要用于传输图像采集模块得到的数据,通过无线模块发送数据到服务器,控制云台舵机以及电机驱动,采集霍尔编码器信号并转换为小车速度。采用此芯片的小型系统板作为控制核心是因为相比于其他芯片具有丰富外设资源和接口,并具备高性能低功耗的特点,满足图像采集的性能需求,以及大容量内存并支持存储器扩容,可满足本设计需求。
27.优选的,本实施例中,使用的主控制器模块采用的是正点原子stm32f407zgt6小型系统板,集成多种接口。针对本设计中涉及到大量图像数据传输的需求,stm32f407系列芯片支持dcmi接口,能够连接ov2640相机传感器的8位并行照相机接口,并使用dma控制器减轻cpu负担,把数据传输任务交付给dma控制器进行传输,并提供高达168mhz的工作频率,以及具备dsp指令提高浮点运算性能,其强大的运算性能足够满足本设计要求。内含192kb ram,更大的内存也就意味着一次性能够采集更高分辨率的图像,系统板上还扩展了1mb sram和16mb flash满足设计需求。其丰富的外设资源在本设计有着举足轻重的作用,提供了多达14个定时器,其中包含6个带有编码器接口模式的定时器,方便结合电机编码器进行计数,每个定时器都能设置pwm输出模式,控制电机和舵机更加便捷。不仅如此,包含了4个usart和2个uart,能够轻松满足本设计中对串口的需求。外加iwdg和wwdg两种看门狗,可保
证小车系统运行的稳定,增加容错率。
28.参考图5,图像采集模块:采用atk-ov2640摄像头模块作为图像采集模块,搭配f4系列芯片支持的dcmi数字摄像头接口可接收高达54mb/s的数据流和多达14条数据总线。在ov2640中只使用到8条数据总线,stm32通过sccb接口协议进行模块寄存器配置。支持rgb565、yuv422等输出格式,并支持图像压缩和窗口设置等,在此设计中输出jpeg图像,更适合web传输和存储,且占据更小的空间,还支持手动调节焦距以及配置摄像头模式。
29.二自由度云台系统:一维平台采用ds3115mg双轴数字舵机实现0-270
°
水平可控角度,二维平台采用rds3115mg单轴数字舵机实现0-180
°
垂直可控角度,搭配双舵机的二自由度云台让摄像头拥有更广的采集范围,在车身禁止状态下也可采集多方位视图,让小车具备更高的灵活性和实用性。
30.参考图6,电机控制系统:此系统采用4台直流减速电机并配有霍尔测速编码器,可实现对电机转速的测量,搭配两块集成的l298n电机驱动模块来控制4路电机,将主控制器输出的pwm波转换为电机的控制信号,并对电机进行调速。4路电机独立控制4个轮子转动形成4驱,提高小车在复杂路况的容错率,增加设备可靠性,强劲的动力输出让小车更加适合未知环境的侦察和勘测。
31.优选的,电机驱动模块支持4路电机驱动,且可以直连12v电源,驱动峰值电流4a,并内置l7805降压芯片提供一个5v稳压输出,为主控制器系统板供电。此模块引脚说明如表1所示。
32.表1 双l298n电机驱动模块引脚说明
引脚名称引脚说明in1-in8电源逻辑控制端,分别控制电机1-4en1-en4电机使能端,分别使能电机1-4on/off内部供电选择,当控制电压在7-35v时跳线帽到on端,可提供5v电源输出;当控制电压小于7v时跳线帽到off端,此时需要外部5v电源给模块芯片供电vin/gnd电机电源接口vcc/gnd当跳线帽在on时,此vcc可做输出;当为off时,此vcc需要外部提供稳定的5v电源作为输入mot1-mot44路电机接口
33.in1到in8引脚分别控制4路电机的旋转方向,en1到en4分别控制4路电机的启动和停止,对此引脚输入pwm波从而实现电机调速功能。单个电机控制状态真值表如表2所示。
34.表2 电机控制真值表enin1in2行为0xx停止100制动101前进110后退111制动
35.电源模块采用12v 5000mah 6节锂电池组,可提供持续6a电流输出,为驱动模块提供12v电源,其强大的负载能力保证设备的运行稳定,内置保护芯片具有过流保护效果。
36.电源系统:采用12v 5000mah锂电池组,可持续输出6a大电流。大容量电池为小车提供超长的续航,并可直接驱动电机,经电机驱动模块转换后可输出5v稳定电压,为主控制器供电,在小车禁止状态下可大幅度延长续航时间。
37.无线通信系统:本系统采用2块atk-esp8266无线模块直连热点,侦察小车需要同时传输图像数据以及状态信息到服务器,并接收服务器下发的指令,因此采用双无线模块来分别传输数据。将小车状态和摄像头、舵机等对实时性要求不高的设置分配到无线模块1中,并连接mqtt服务器,以保证数据周期性同步。将图像传输和移动控制分配到无线模块2中,并连接tcp服务器以确保更低的延迟和干扰。
38.主控制器通过串口与无线模块进行通信,模块可配置tcp和udp传输协议,并支持sta+ap、sta、ap三种工作模式,在此设计中都设置为sta模式,并配置为tcp客户端,实现连接tcp服务器。
39.小车物理架构:采用双层铝合金板作为底盘支撑,在底板和轮子之间使用可调节减震悬挂,以保证更平稳的通过复杂道路。使用4个麦克纳姆轮,实现原地全方位移动,提高小车系统的灵活性。
40.以上所述仅为本实用新型的较佳实施例,凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本实用新型的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1