双伺服抬板免压进纸控制系统的制作方法
1.本实用新型属于送纸控制技术领域,尤其涉及双伺服抬板免压进纸控制系统。
背景技术:
2.进纸控制系统,是属于前缘送纸机的控制系统,前缘送纸机常用作印刷模切机的送纸单元,印刷模切机还包括印刷单元和模切单元。前缘送纸是以纸板前边缘为基准,在送纸轮的周期性加速、同步以及减速作用下,通过格栅配合将纸板有序的抬起和放下,并将堆叠好的纸板连续或者间隔的单张送入印刷模切机的印刷单元,在送纸的同时,格栅底部设有风机,通过风机形成负压,牢牢吸住纸板,使得送纸过程中减少送纸轮的摩擦,在纸板的加工制造中,如果送纸发生偏差,会产生如印刷套印不准、模切位置偏移,造成纸板装配不上的情况出现,因此,送纸控制系统以及其工艺显得十分重要。
3.现有技术的送纸控制系统,设有五个送纸轮,分别由五个电机带动,每个电机控制一个送纸轮,通过调整电机的转速使得纸板能快速高效的进入印刷单元,但是,每个送纸轮对应一个电机,使得生产成本增高,不利于生产制造。
技术实现要素:
4.本实用新型所解决的技术问题在于提供一种双伺服抬板免压进纸控制系统,通过将若干个送纸轮通过一个伺服电机带动,同时通过伺服电动缸控制升降抬板的升起和落下,避免纸板在传送过程中产生误差,同时降低生产成本。
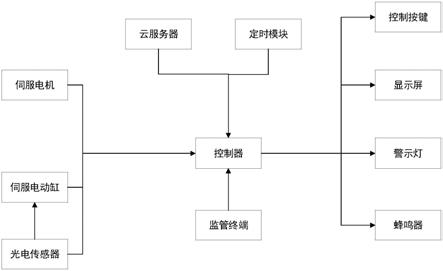
5.本实用新型提供的基础方案:双伺服抬板免压进纸控制系统,包括送纸机构,所述送纸机构包括伺服电机、伺服电动缸、若干个送纸轮、升降抬板、通信模块、光电传感器以及控制器,所述升降抬板上设有若干个用于容纳送纸轮的凹槽,所述若干个送纸轮通过伺服电机控制,所述升降抬板通过伺服电动缸控制,所述伺服电机、伺服电动缸、通信模块以及光电传感器均与控制器电连接,所述控制器用于根据通信模块的信号控制伺服电机的启闭,所述控制器还用于根据光电传感器的信号控制伺服电动缸的启闭。
6.本实用新型的原理及优点在于:本实用新型中通信模块接收信号,传输给控制器,控制器控制一个伺服电机控制多个送纸轮,光电传感器检测纸板的传送位置,并将信号传输至控制器,控制器控制伺服电动缸驱动升降抬板升起和降落,抵住后续的纸板,使得当前纸板在传送过程中,后续的纸板不会被带动往前输送。因此,本实用新型的优点在于通过一个伺服电机控制多个送纸轮,降低生产成本,再通过伺服电动缸控制升降抬板的升降,进而避免未传送的纸板被带动输送,减少传送失误的情况发生。
7.进一步,所述送纸轮一端设有从动齿轮,所述从动齿轮之间设有滚轮,所述伺服电机的自由端设有主齿轮,所述主齿轮和从动齿轮之间通过同步齿形带啮合,所述滚轮用于调整同步齿形带的松紧度。
8.有益效果:伺服电机上的主齿轮与送纸轮的从动齿轮通过同步齿形带啮合,实现了伺服电机和送纸轮的同步转动,同时通过滚轮调节同步齿形带的松紧度,提升伺服电机
和送纸轮之间同步转动的稳定性。
9.进一步,所述送纸轮一端设有从动齿轮,所述伺服电机的自由端设有主齿轮,所述主齿轮位于从动齿轮之间并与从动齿轮位于同一水平线,所述主齿轮与从动齿轮之间通过同步齿形带啮合。
10.有益效果:将伺服电机的主齿轮和送纸轮的从动齿轮同一水平线放置,通过同步齿形带啮合,实现伺服电机和送纸轮之间的同步转动。
11.进一步,所述升降抬板底部设有升降杆,所述升降杆中部设有导向套,所述伺服电动缸的伸缩杆设有平面凸轮,所述平面凸轮顶部设有一弧形曲面,所述升降杆底部与平面凸轮顶部的弧形曲面接触。
12.有益效果:通过将升降杆接触平面凸轮的弧形曲面,平面凸轮在伺服电动缸的作用下往复运动,并带动升降杆在平面凸轮的弧形曲面上作升降运动,实现升降抬板的升起和降落功能。
13.进一步,还包括定时模块,所述定时模块与控制器电连接,所述控制器用于根据定时模块的信号控制送纸机构的启闭。
14.有益效果:通过定时模块设置的时间可以定时启动送纸机构,实现自动送纸功能。
15.进一步,还包括云服务器,所述送纸机构与云服务器网络连接,所述控制器用于通过通信模块向云服务器上传运行日志,所述控制器还用于接收并执行云服务器下发的控制指令。
16.有益效果:通过云服务器查看送纸机构的运行记录,便于对送纸机构进行管理。
17.进一步,还包括监管终端,所述监管终端与云服务器网络连接,所述监管终端用于通过云服务器向送纸机构发送控制命令。
18.有益效果:通过监管终端方便管理人员进行远程管理和操作。
19.进一步,还包括控制面板,所述控制面板包括显示屏和控制按键,所述显示屏、控制按键均与控制器电连接;所述控制器用于控制显示屏显示送纸机构的运行记录,所述下控制器还用于根据控制按键控制显示屏的显示内容。
20.有益效果:通过控制面板的显示屏和控制按键,方便管理人员查看和操作送纸机构。
21.进一步,还包括警报模块,所述警报模块与控制器电连接,所述控制器还用于在送纸机构运行完毕后控制警报模块的启动,所述控制器还用于通过通信模块向云服务器和监管终端发送报警信号;所述控制器还用于通过通信模块接收服务器或监管终端的控制命令,所述控制器还用于根据接收的控制命令控制警报模块的启闭。
22.有益效果:通过警报模块能够及时提醒管理人员送纸机构运行完毕。
23.进一步,所述警报模块包括警示灯和蜂鸣器。
24.有益效果:警示灯和蜂鸣器都是常用的警报器。
附图说明
25.图1为本实用新型实施例一和实施例二的原理框图;
26.图2为本实用新型实施例一的结构图;
27.图3为本实用新型实施例二的结构图。
具体实施方式
28.下面通过具体实施方式进一步详细说明:
29.说明书附图中的标记包括:伺服电机1、伺服电动缸2、送纸轮3、升降抬板4、从动齿轮5、滚轮6、主齿轮7、同步齿形带8、升降杆9、导向套10、平面凸轮11、滑轨12。
30.实施例一:
31.实施例一基本如附图1和图2所示:双伺服抬板免压进纸控制系统,包括送纸机构,送纸机构包括伺服电机1、伺服电动缸2、若干个送纸轮3、升降抬板4、通信模块、光电传感器以及控制器,升降抬板4上设有若干个用于容纳送纸轮3的凹槽,在本实施例中,送纸轮3设有5个,升降抬板4设有4段,5个送纸轮3交叉分布在升降抬板4的凹槽内;5个送纸轮3通过伺服电机1控制,具体为,送纸轮3的一端设有从动齿轮5,即一共有5个从动齿轮5,两两从动齿轮5之间设有滚轮6,共2个滚轮6,伺服电机1的自由端设有主齿轮7,主齿轮7和从动齿轮5之间通过同步齿形带8啮合,滚轮6用于调整同步齿形带8的松紧度,具体为,同步齿形带8的内部齿轮条与主齿轮7和从动齿轮5啮合,同步齿形带8的外部卡在滚轮6的滚槽内,使得同步齿形带8处于绷紧状态,这样,伺服电机1转动时,在同步齿形条的作用下送纸轮3的会与电机同步转动,使得送纸轮3处于匀速状态,送纸轮3在匀速状态下,纸板传送过程中送纸轮3会将多块纸板带动前进,进而造成生产事故,因此,本实用新型中,升降抬板4分为4段,每段升降抬板4底部设有升降杆9,升降杆9的中部设有导向套10,避免升降杆9在升降过程中出现偏差,伺服电动缸2为伸缩杠,其伸缩杆设有平面凸轮11,平面凸轮11为一顶部设有弧形曲面的方块,平面凸轮11底部设有滑动槽,滑动槽与滑轨12契合,使得伺服电动缸2在带动平面凸轮11往复运动时,平面凸轮11的滑动槽在滑轨12上往复运动,升降杆9的底部与平面凸轮11顶部的弧形曲面接触,升降杆9在平面凸轮11的往复运动中做升降运动,从而将升降抬板4的4段不断被顶起和降下;
32.伺服电机1、伺服电动缸2、通信模块以及光电传感器均与控制器电连接,控制器用于根据通信模块的信号控制伺服电机1的启闭,控制器还用于根据光电传感器的信号控制伺服电动缸2的启闭,在本实施例中,控制器包括plc主控器以及伺服驱动器,plc主控器其型号为xd3-16t-e,xd3主控器具备很快的数据处理和运动状态触发能力,现场运行扫描周期0.1ms,确保了控制的高精度;伺服驱动器型号为ds3-47p5-pqa,ds3伺服驱动器用于驱动伺服电机1和伺服电动缸2,并通过2500线编码器反馈伺服电机1转动轴位置,伺服电机1为三相永磁伺服电机1,其具有1500rpm的额定转速,2500线的编码器分辨率,伺服电动缸2采用ibm系列,具体型号为ibm50,其行程为2m,速度达到1m/秒,精密推力控制精度为5%;光电传感器用于检测纸板传送位置,当纸板传送过第一个分段升降抬板4时,编码器反馈伺服电机1转动位置,伺服驱动器根据编码器的反馈信息和光电传感器的反馈信息控制伺服电动缸2启动,第一分段的升降抬板4抬起,抵住后续的纸板,避免后续纸板被送纸轮3带动从而使得多块纸板同步传送,同理,纸板依次经过第二、第三、第四分段的升降抬板4时,光电传感器将纸板在传送过程中的位置信息反馈给控制器,控制器再控制伺服电动缸2启动,从而将后续的第二、第三、第四升降抬板4升起,当纸板传送完成时,伺服电动缸2复位,复位过程中升降抬板4降下,供下一块纸板传送,如此往复。通信模块在本实施例中为4g网络通信模块,在本实施例的其他实施例中,通信模块还可以是wifi模块,光电传感器的型号为dr18圆型光电传感器。
33.还包括定时模块,定时模块与控制器电连接,控制器用于根据定时模块的信号控制送纸机构的启闭,在本实施例中,定时模块设定好时间,控制器根据定时模块的设置时间控制送纸机构的启闭,定时模块为plc控制器内置的定时器,再本技术的其他实施例中,还可以采用独立的时钟芯片实现定时的功能。
34.还包括云服务器,送纸机构与云服务器网络连接,控制器用于通过通信模块向云服务器上传运行日志,控制器还用于接收并执行云服务器下发的控制指令。
35.还包括监管终端,监管终端与云服务器网络连接,监管终端用于通过云服务器向送纸机构发送控制命令。
36.还包括控制面板,所述控制面板包括显示屏和控制按键,所述显示屏、控制按键均与控制器电连接;所述控制器用于控制显示屏显示送纸机构的运行记录,所述下控制器还用于根据控制按键控制显示屏的显示内容,在本实施例中,显示屏采用oled显示屏,控制按键采用键盘。
37.还包括警报模块,警报模块与控制器电连接,控制器还用于在送纸机构运行完毕后控制警报模块的启动,控制器还用于通过通信模块向云服务器和监管终端发送报警信号;控制器还用于通过通信模块接收服务器或监管终端的控制命令,控制器还用于根据接收的控制命令控制警报模块的启闭,在本实施例中,警报模块为警示灯和蜂鸣器。
38.实施例二:
39.如图3所示,实施例二与实施例一的不同之处在于,实施例二中送纸轮3一端设有从动齿轮5,共5个从动齿轮5,伺服电机1的自由端设有主齿轮7,主齿轮7位于从动齿轮5之间并与从动齿轮5位于同一水平线,所述主齿轮7与从动齿轮5之间通过同步齿形带8啮合。在本实施例中,同步齿形带8的内圈齿条将主齿轮7和从动齿轮5啮合,使得伺服电机1在转动时同步带动从动齿轮5转动,从而使得送纸轮3转动。
40.以上的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1