一种水泥杆检测平台控制系统的制作方法
1.本实用新型涉及水泥杆检测技术领域,具体涉及一种水泥杆检测平台控制系统。
背景技术:
2.水泥杆一般采用混凝土与钢筋或钢丝支撑,是架空输配电线路中最常用的支撑结构之一,此无论是城市中还是山岭上,均架设有水泥杆。由于其长期工作在外,受土壤环境中水的侵蚀及各种外荷载和内应力的作用,容易产生裂缝。裂缝的存在将加重运行过程中杆体受有害物质侵蚀的程度和钢筋锈蚀的程度,降低电杆的承载能力,从而降低水泥杆的耐久性,增加电网的运行风险。因此,对水泥杆的质量提出了更高的要求。水泥杆的检测需要借助检测平台,现有技术是通过传统的机械开关控制直流电机,用电机驱动液压系统,从而是液压缸工作,带动检测平台的伸缩臂进行伸缩移动。操作不便,控制设备时需要在检测平台设备旁边进行操作,机械开关距离伸缩臂较远,不能实现精确控制;安全性能低,机械开关很容造成误触;控制单一,不能与整个平台的控制系统实现联动。
3.公开号为cn212486799u的专利公开了一种用于电杆倾斜的无线检测终端,包括lora通信模块,控制器通过lora通信模块与处在lora网络中的处理终端连接;用于检测电杆倾斜度的传感器与控制器连接。控制器为hc32l 110c6ua型单片机,所述lora通信模块为lm005a型lora通信模块。结合其它结构有效避免了现有技术中对电杆的倾斜度进行检测的控制器与处理终端之间的连接主要采用rs485串口连接而传输距离一般不超过200m、超过200m的应用都需要加入中继进行信号放大、而通过有线网络连接控制器与处理终端来进行数据传输会带来施工和组网方式复杂、复杂的结构容易出现故障不易排查的缺陷。但是,安全性能和操作性能有待提高。
技术实现要素:
4.有鉴于此,本实用新型提供了一种水泥杆检测平台控制系统。
5.为解决上述技术问题,本实用新型所采取的技术方案是:
6.一种水泥杆检测平台控制系统,包括通信模块和与所述通信模块相连接的控制模块;所述通信模块包括无线信号接收器、与所述无线信号接收器相连接的光耦合器;所述控制模块包括与所述光耦合器信号连接的单片机及与所述单片机相连接的多组继电器组合;所述控制系统控制检测平台的多个机械臂,每个所述机械臂上均设有通过电磁阀控制的液压管路。
7.进一步的,每个所述继电器组合均包括两个继电器,所述继电器组合的数量与所述机械臂的数量一致,每个所述继电器组合控制一个所述机械臂。
8.进一步的,所述单片机的信号输入端与所述光耦合器连接,所述接收器接收到遥控和/或wifi信号,经所述光耦合器隔离后,将信号传输给所述单片机。
9.进一步的,所述单片机的信号输出端与多组所述继电器组合连接,并通过所述继电器组合控制所述电磁阀,进而控制所述机械臂。
10.进一步的,所述单片机通过wifi连接平板电脑。
11.进一步的,所述机械臂的数量为6个,分别为电杆臂、伸缩臂、电杆臂剪架、伸缩臂剪架、电杆臂升降架和伸缩臂升降架。
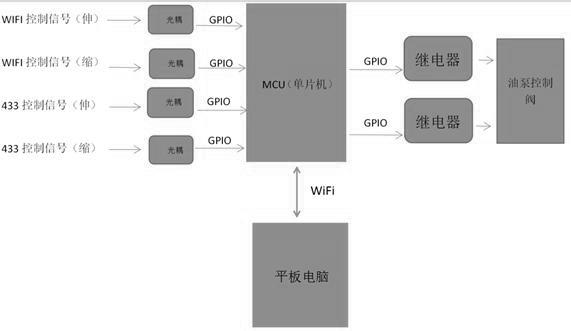
12.本实用新型的有益效果是:本实用新型通过接收wifi或者433的控制指令,经过光耦隔离将信号传输到mcu(stm32f103c8t6),mcu根据不同的控制指令,经过计算处理,执行不同的操作。mcu通过gpio控制继电器,将处理过得信号发出,通过控制继电器来控制机械臂的电磁阀,从而实现控制电杆臂、伸缩臂、电杆臂剪架、伸缩臂剪架、电杆臂升降架、伸缩臂升降架的动作,使机械臂的控制更加安全,智能。
13.本实用新型解决了现有技术中通过传统的机械开关控制直流电机,用电机驱动液压系统,从而使液压缸工作,带动检测平台进行伸缩移动,带来的操作不便和安全性能低等技术问题。具有以下优点:
14.1.不会造成电机损伤,设备寿命提高;
15.2.检测电杆时,机械臂可以与电杆检测平台主体联动,方便快速;
16.3.遥控器操作,操作人员可以站到机械臂旁边进行操作,保证了人员的安全;
17.4.通过平面显示,可以使测试数据远程监控。
附图说明
18.下面结合附图对本实用新型作进一步的详细说明。
19.图1是本实用新型水泥杆检测平台控制系统的原理框图。
20.图2是本实用新型水泥杆检测平台控制系统的电路示意图。
21.图3是本实用新型伺服电机的电路示意图。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图1-3,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例1
24.参阅图1-3,该实施例提供了一种水泥杆检测平台控制系统,包括通信模块和与所述通信模块相连接的控制模块;所述通信模块包括无线信号接收器、与所述无线信号接收器相连接的光耦合器;所述控制模块包括与所述光耦合器信号连接的单片机及与所述单片机相连接的多组继电器组合;所述控制系统控制检测平台的多个机械臂,每个所述机械臂上均设有通过电磁阀控制的液压管路。
25.每个所述继电器组合均包括两个继电器,所述继电器组合的数量与所述机械臂的数量一致,每个所述继电器组合控制一个所述机械臂。
26.所述单片机的信号输入端与所述光耦合器连接,所述接收器接收到遥控和/或wifi信号,经所述光耦合器隔离后,将信号传输给所述单片机。
27.所述单片机的信号输出端与多组所述继电器组合连接,并通过所述继电器组合控制所述电磁阀,进而控制所述机械臂。
28.所述单片机通过wifi连接平板电脑。
29.所述机械臂的数量为6个,分别为电杆臂、伸缩臂、电杆臂剪架、伸缩臂剪架、电杆臂升降架和伸缩臂升降架。
30.本实用新型设置6个机械臂,每个机械臂通过对应的电磁阀控制相应的液压管路。当设备收到433遥控信号时,433接收器通过解析不同的控制指令,去控制相应的继电器,从而使不同的机械臂进行工作。当然,也可以根据需要设置其他数量的机械臂。
31.本实用新型通过接收wifi或者433 m的控制指令,经过光耦隔离将信号传输到mcu(stm32f103c8t6),mcu根据不同的控制指令,经过计算处理,执行不同的操作。mcu通过gpio控制继电器(jqc-3ff-s-z),将处理过得信号发出,通过控制继电器来控制电磁阀,从而实现控制电杆臂、伸缩臂、电杆臂剪架、伸缩臂剪架、电杆臂升降架、伸缩臂升降架的动作。
32.参阅附图2,6个机械臂中只有伸缩臂的控制指令是从信号处理板发出的,信号处理板通过接收433接收器给的遥控指令和主控板给的控制指令,通过对不同的信号进行处理分析从而去控制伸缩电杆用的机械臂的继电器。该控制系统有两个电机,一个24v的直流电机,一个220v的伺服电机。直流电机用来给5个机械臂提供油压动力。参阅附图3,220v 伺服电机用来给伸缩臂提供油压动力。主控板可以通过控制伺服电机的转速可以控制伸缩杆伸长或是缩短的速度。
33.本实用新型手柄遥控器用的是433m,各个机械臂的控制系统之间的通信用的是wifi。两种不同的无线控制方式通过mcu(stm32f103c8t6)去计算处理,将错误的信号滤除,保证控制信号的准确。mcu接收两种不同的控制信号后,通过gpio去控制两组继电器,保证两组继电器之间的切换有时间间隔,从而是电机的正转与反转之间的切换有可以安全进行,保证设备在正转的同时,不会有反转控制指令发出,也保证了设备在正转与反转之前的切换时有时间间隔,不会造成电机损伤。该控制系统同时也采用电气隔离的控制方式,保证设备安全高效工作。
34.本实用新型输入信号和输出信号完全隔离,起到电气保护作用;mcu可根据不同的输入信号,进行处理计算然后输出,防止人为的误操作造成设备损坏;实现了不同信号之间的控制,可以达到3.3v控制24v或者更高电压的目的;主板和显示平板之间通过wifi控制,提高了设备之间数据传输的稳定性。
35.实施例2
36.本实施例提供一种水泥杆检测平台控制系统,是在实施例1的基础上进行的改进:在操作过程中,由于wifi控制对距离有限制,在距离稍远的时候容易wifi信号在线和离线不断切换,从而造成设备的工作异常。
37.对此,本实施例从两个方面解决,一:增加高增益天线,同时要求操作人员在固定的范围内进行操作。二:控制软件上增加wifi通信时的心跳检测,当设备3s之内没有检测的wifi的心跳数据,就直接将设备停机,不再进行检测。
38.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1