一种基建现场的无人化运输系统的制作方法
1.本技术涉及基建施工技术领域,特别涉及一种基建现场的无人化运输系统。
背景技术:
2.基建是促进社会生成发展和挺高人民生活水平的重要手段,为国民经济各部门新增固定资产和生成能力,对有计划地建立新型产业部门,调整原有经济结构,合理分布生产力,采用先进技术改造国民经济,加速生成发展速度,为社会提供住宅和科研、文教卫生设施以及城市基础设施,为改善人民物质文化生活等方面均具有重要意义。基建在整个国民经济中占有重要地位,对经济发展起着主导的、决定性的作用。
3.而电力行业作为社会经济的助推剂,健全完善的电力基础建设,是社会经济基础配套体系的根本保障,是保障国家电网坚强完善的重要环节。目前,由于基建现场施工对象、施工环境的特殊性,因而,对基建安全具有更高的要求。目前,通过管理人员在基建现场对人员、设备等进行调度,各种施工设备均由操作人员进行现场操作,满足施工需求,各种施工设备不断穿梭、移动以及调度命令的人工传播,不可避免的造成施工事故,甚至带来不可挽回的损失。
4.因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现要素:
5.本技术的目的在于提供一种基建现场的无人化运输系统,以解决或缓解上述现有技术中存在的问题。
6.为了实现上述目的,本技术提供如下技术方案:
7.本技术提供了一种基建现场的无人化运输系统,用于基建施工的拌合物料的无人化运输,包括:无人运输设备,所述无人运输设备按照规划路径在所述基建现场的施工工地和所述基建现场的物料拌合场之间移动,将所述物料拌合场的所述拌合物料运送至所述施工工地;固定监控设备,所述固定监控设备包括路线监控单元和车辆监控单元,所述路线监控单元沿所述无人运输设备的规划路径固定安装,能够对所述无人运输设备运行的路况信息进行实时采集;所述车辆监控单元固定安装于所述无人运输设备上,能够对所述无人运输设备的车辆运行参数进行实时采集;集中控制中心,与所述无人运输设备、所述路线监控单元通信连接,接收所述路线监控单元发送的所述路况信息,并根据所述路况信息调整所述规划路径;远程模拟驾驶舱,与所述集中控制中心、所述路线监控单元、所述车辆监控单元通信连接,根据所述路线监控单元发送的所述路况信息对所述集中控制中心下发的调整后的所述规划路径进行确认,并根据所述车辆监控单元发送的所述车辆运行参数操控所述无人运输设备按照确认后的所述规划路径运行。
8.优选的,所述路线监控单元包括:多个红外云台摄像机,多个所述红外云台摄像机沿所述规划路径均布,实时采集所述无人运输设备运行的路况图像并发送至所述集中控制中心。
9.优选的,所述集中控制中心根据接收的所述路况图像对所述无人运输设备的所述规划路径进行调整,并发送至所述远程模拟驾驶舱。
10.优选的,所述路线监控单元还包括:多个传感器,多个所述传感器随多个所述红外云台摄像机沿所述规划路径并列布置,所述传感器与所述集中控制中心、所述远程模拟驾驶舱通信连接,将采集的所述无人运输设备的环境数据分别发送至所述集中控制中心和所述远程模拟驾驶舱。
11.优选的,多个所述传感器至少包括:多个温度传感器和多个风速传感器,多个所述温度传感器和多个所述风速传感器沿所述无人运输设备的所述规划路径间隔布置。
12.优选的,所述路线监控单元还包括:多个红外对射传感器,多个所述红外对射传感器随多个所述红外云台摄像机沿所述规划路径并列布置;所述红外对射传感器与所述模拟驾驶舱通信连接,并监测所述无人运输设备运动时的偏移数据,并发送至所述模拟驾驶舱。
13.优选的,所述红外对射传感器的数量是所述红外云台摄像机的两倍,两个相对安装的所述红外对射传感器随一个所述红外云台摄像机并列布置;且随相邻两个所述红外摄像机并列布置的两个所述红外对射传感器相向安装。
14.优选的,所述无人运输设备为无人移动卡车,对应的,所述车辆监控单元与所述无人移动卡车的电子控制单元连接,并调取所述电子控制单元采集到的所述无人移动卡车的行车数据,并实时发送至所述远程模拟驾驶舱。
15.优选的,所述无人移动卡车的行车数据至少包括:速度、油门、刹车、水温、发送机运转参数。
16.优选的,所述车辆监控单元包括:多个红外摄像头,多个所述红外摄像头跟随所述无人运输设备的启动而启动,对所述无人运输设备从多个角度进行外部图像采集并发送至所述集中控制中心,以由所述集中控制中心拼接为环绕所述无人运输设备的360
°
影像,并传输至所述远程模拟驾驶舱。
17.与最接近的现有技术相比,本技术实施例的技术方案具有如下有益效果:
18.本技术提供的技术方案中,通过远程遥控通信使无人运输设备按照规划路径在所述基建现场的施工工地和基建现场的物料拌合场之间移动,将物料拌合场的拌合物料运送至施工工地;沿无人运输设备的规划路径固定安装固定监控设备,对无人运输设备运行的路况信息进行实时采集,并发送至集中控制中心,由集中控制中心根据路况信息调整无人运输设备的运行线路规划路径;通过在无人运输设备上固定安装车辆监控单元,对无人运输设备的车辆运行参数进行实时采集,并发送至远程模拟驾驶舱,由远程模拟驾驶舱对集中控制中心下发的调整后的规划路径进行确认,并根据车辆监控单元发送的车辆运行参数操控无人运输设备按照确认后的规划路径运行。籍此,实现在基建现场,对拌合物料的无人化运输,减少在无人运输设备的行进路线上的调度人员和施工人员,使施工人员仅集中在物料拌合场和施工工地,有效避免无人运输设备的穿梭、移动带来的施工事故,极大的提高基建现场的施工安全和施工效率。
附图说明
19.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。其中:
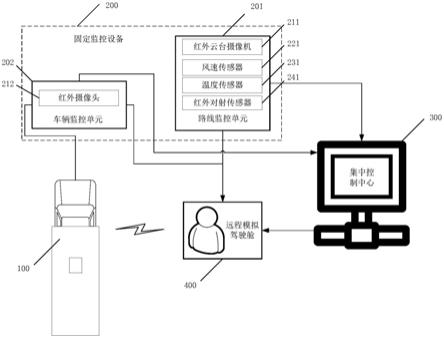
20.图1为根据本技术的一些实施例提供的一种基建现场的无人化运输系统的结构示意图。
21.附图标记说明:
22.100-无人运输设备;200-固定监控设备;300-集中控制中心;400-远程模拟驾驶舱;
23.201-路线监控单元;202-车辆监控单元;
24.211-红外云台摄像机;221-风速传感器;231-温度传感器;241-红外对射传感器;212-红外摄像头。
具体实施方式
25.下面将参考附图并结合实施例来详细说明本技术。各个示例通过本技术的解释的方式提供而非限制本技术。实际上,本领域的技术人员将清楚,在不脱离本技术的范围或精神的情况下,可在本技术中进行修改和变型。例如,示为或描述为一个实施例的一部分的特征可用于另一个实施例,以产生又一个实施例。因此,所期望的是,本技术包含归入所附权利要求及其等同物的范围内的此类修改和变型。
26.在本技术的描述中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术而不是要求本技术必须以特定的方位构造和操作,因此不能理解为对本技术的限制。本技术中使用的术语“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间部件间接相连;可以是有线电连接、无线电连接,也可以是无线通信信号连接,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
27.如图1所示,该基建现场的无人化运输系统用于基建施工的拌合物料的无人化运输,该系统包括:无人运输设备100、固定监控设备200、集中控制中心300和远程模拟驾驶舱400。其中,无人运输设备100按照规划路径在基建现场的施工工地和基建现场的物料拌合场之间移动,将物料拌合场的拌合物料运送至施工工地;固定监控设备200包括路线监控单元201和车辆监控单元202,路线监控单元201沿无人运输设备100的规划路径固定安装,能够对无人运输设备100运行的路况信息进行实时采集;车辆监控单元202固定安装于无人运输设备100上,能够对无人运输设备100的车辆运行参数进行实时采集;集中控制中心300与无人运输设备100、路线监控单元201进行通信连接,接收路线监控单元201发送的路况信息,并根据路况信息调整规划路径;远程模拟驾驶舱400与集中控制中心300、路线监控单元201、车辆监控单元202通信连接,根据路线监控单元201发送的路况信息对集中控制中心300下发的调整后的规划路径进行确认,并根据车辆监控单元202发送的车辆运行参数操控无人运输设备100按照确认后的规划路径运行。
28.在本技术实施例中,在基建现场的施工工地和物料拌合场之间提前规划多条无人运输设备100的运行线路,并将多条运行线路输入集中控制中心300,由调度人员在施工前,根据施工工地的位置和物料拌合场的位置,结合施工现场情况,在集中控制中心300选择多条运行线路中的一条作为无人运输设备100的规划路径并下发至无人运输设备100和远程模拟驾驶舱400;施工过程中,无人运输设备100根据集中控制中心300下发的规划路径在物
料拌合场和施工工地之间往返运行,将物料拌合场的拌合物料运送至施工工地。
29.在本技术实施例中,远程模拟驾驶舱400与无人运输设备100相配套,驾驶人员通过远程模拟驾驶舱400操作无人运输设备100,通过远程模拟驾驶舱400与无人运输设备100的远程无线传输,将远程模拟驾驶舱400中驾驶指令发送至无人运输设备100,操纵无人运输设备100沿规划路径前进。
30.在本技术实施例中,通过沿规划路径安装路线监控单元201,对无人运输设备100运行是的路况信息进行实时采集并发送至集中控制中心300,由集中控制中心300的值班人员根据路况信息实时了解无人运输设备100的当前行驶的运行线路上的动态,以便及时的对规划路径进行调整,避免事故或损失。
31.在本技术实施例中,通过在无人运输设备100上安装车辆监控单元202对无人运输设备100的车辆运行参数进行实时采集并发送至远程模拟驾驶舱400,以便远程模拟驾驶舱400中的驾驶人员实时了解无人运输设备100的车辆状态,有利于对无人运输设备100的车辆状况进行实时掌控。
32.在一些可选实施例中,路线监控单元201包括:多个红外云台摄像机211,多个红外云台摄像机211沿规划路径均布,实时采集无人运输设备100运行的路况图像并发送至集中控制中心300。籍此,通过红外云台摄像机211对无人运输设备100的路况图像进行采集,有效提高路线监控单元201对环境的适应性,有利于提升基建现场无人化运输系统的稳定性。
33.在本技术实施例中,红外云台摄像机211的安装数量和部位覆盖无人运输设备100运行的规划路径,确保监控无盲区,且红外云台摄像机211具有防水、防尘、云台控制功能,以保证能够全天候清晰显示规划路径的信息。红外云台摄像机211的拍摄像素不低于1080p,变焦不低于20倍,上传至集中控制中心300的视频图像为高清数字信号。
34.在一具体的例子中,集中控制中心300根据接收的路况图像对无人运输设备100的规划路径进行调整,并发送至远程模拟驾驶舱400。具体的,红外云台摄像机211将路况图像发送至集中控制中心300,值班人员在集中控制中心300根据路况图像对运行线路的行车情况进行判断,根据实际车流密度和路况对无人运输设备100的规划路径进行调整,以降低同一规划路径上的无人运输设备100的数量,或者,将特殊路况(比如:塌陷等)的规划路径上的无人运输设备100调整至其它规划路径。
35.在另一具体的例子中,路线监控单元201还包括:多个传感器,多个传感器随多个红外云台摄像机211沿规划路径并列布置,传感器与集中控制中心300、远程模拟驾驶舱400通信连接,将采集的无人运输设备100的环境数据分别发送至集中控制中心300和远程模拟驾驶舱400。
36.在本技术实施例中,通过与红外云台摄像机211并列设置的传感器采集无人运输设备100的环境数据发送至集中控制中心300,将红外云台摄像机211采集的图像和传感器的环境数据相结合,对无人运输设备100的运行线路的实时环境进行监控,以便随时调整无人运输设备100的规划路径。驾驶人员根据无人运输设备100的运行线路的实时环境,更利于对无人运输设备100进行操控,以及时应对突发状况。
37.进一步的,多个传感器包括:多个温度传感器231和多个风速传感器221,多个温度传感器231和多个风速传感器221沿无人运输设备100的规划路径间隔布置。籍此,即实现了对无人运输设备100的运行线路的实时环境的有效监测,同时,避免基建现场无人化运输系
统冗余,提高系统运行的稳定性。
38.在另一具体的例子中,路线监控单元201还包括:多个红外对射传感器241,多个红外对射传感器241随多个红外云台摄像机211沿规划路径并列布置;红外对射传感器241与远程模拟驾驶舱400通信连接,并监测无人运输设备100运动时的偏移数据,并发送至远程模拟驾驶舱400。
39.在本技术实施例中,通过红外对射传感器241在无人运输设备100的运行线路上形成电子围栏,确保无人运输设备100在规定的范围内运行,进一步保证基建现场的有序,降低基建现场事故概率。
40.进一步的,红外对射传感器241的数量是红外云台摄像机211的两倍,两个相对安装的红外对射传感器241随一个红外云台摄像机211并列布置;且相连两个红外摄像机并列布置的两个红外对射传感器241相向安装。即,在一台红外云台摄像机211的安装柱上相对安装两个红外对射传感器241,相邻两个红外云台摄像机211的安装柱上相向安装两个红外对射传感器241。也就是说,在同一安装柱上的两个红外对射传感器241背对背安装,相邻两个安装柱上的红外对射传感器241面对面安装。籍此,实现在无人运输设备100的运行线路上的全封闭式电子围栏,进一步确保无人运输设备100运行时的安全,降低事故发生的概率。
41.在一些可选实施例中,无人运输设备100为无人移动卡车,对应的,车辆监控单元202与无人移动卡车的电子控制单元连接,并调取电子控制单元采集到的无人移动卡车的行车数据,并实时发送至远程模拟驾驶舱400。具体的,无人移动卡车的行车数据至少包括:速度、油门、刹车、水温、发动机运转参数等。籍此,通过实时调取无人移动卡车的行车数据传输至远程模拟驾驶舱400,使驾驶员实时了解无人移动卡车的运行状态,便于对突发状况做出及时调整。
42.在一些可选实施例中,车辆监控单元202包括:多个红外摄像头212,多个红外摄像头212跟随无人运输设备100的启动而启动,对无人运输设备100从多个角度进行外部图像采集并发送至集中控制中心300,以由集中控制中心300拼接为环绕无人运输设备100的360
°
影像,并传输至远程模拟驾驶舱400。籍此,有效提高了远程模拟驾驶舱400中驾驶人员对无人运输设备100的运行环境的掌握,便于驾驶人员通过远程模拟驾驶舱400对无人运输设备100的操作做出及时调整,提高无人运输车辆的运行安全,降低事故发生概率。
43.以上仅为本技术的优选实施例,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1