一种多轴EtherCAT总线运动控制器的制作方法
一种多轴ethercat总线运动控制器
技术领域
1.本实用新型涉及工业控制技术领域,具体涉及一种多轴ethercat总线运动控制器。
背景技术:
2.运动控制器是自动化设备的大脑,它控制驱动器带动马达完成精确复杂的运动指令。运动控制器的传统控制方式目前常用有两类,一种是脉冲+方向控制的开环控制方式,另一种是速度模拟量+位置反馈的闭环控制方式。这两种传统控制有着很明显的弊端,多要制作大量控制线缆,给前期开发、后期维护都带来了巨大麻烦。同时线缆太多也带来线缆之间互相干扰的问题。
3.为了解决上述弊端,市场上出现了很多串行网络控制方案很好解决了线缆过多,干扰大的问题,但是工控巨头们都推出了自己的解决方案,这些方案互不兼容,没有办法自由组合使用。欧洲的ethercat协议是一个标准开放的工业实时以太网络协议,目前在各个工控厂家间逐渐流行,是当前具实用化意义并适用于运动控制的开放式实时工业以太网高速串行总线技术。
4.因此,开发一款基于ethercat总线的运动控制器十分有必要。
技术实现要素:
5.本实用新型针对现有技术中存在的技术问题,提供一种多轴ethercat总线运动控制器,其。
6.本实用新型解决上述技术问题的技术方案如下:
7.一种多轴ethercat总线运动控制器,包括主控单元以及分别和主控单元通信连接的运动控制单元和ethercat总线,所述ethercat总线基于开放的工业实时以太网络协议,所述运动控制单元与ethercat总线通信连接,所述ethercat总线上设有总线驱动器控制接口;所述运动控制单元上设有伺服驱动器控制接口,所述伺服驱动器控制接口基于脉冲+方向协议。
8.在上述技术方案的基础上,本实用新型还可以做如下改进。
9.优选的,所述运动控制器还包括与所述主控单元通信连接的io控制单元,所述io控制单元上设有多路与io控制单元光电隔离的io接口,多路所述io接口分别通过io控制单元与主控单元通信连接。
10.优选的,所述ethercat总线上设有总线io扩展接口,所述总线io扩展接口通过ethercat总线与主控单元通信连接。
11.优选的,所述ethercat总线上设有多个总线驱动器控制接口,多个所述总线驱动器控制接口与总线io扩展接口串联。
12.优选的,所述主控单元的电源接口上设有直流正负极盲插电路,所述直流正负极盲插电路包括桥式整流电路和开关放大电路,所述桥式整流电路的输入端连接外部电源,
所述桥式整流电路的输出端与开关放大电路并联,所述开关放大电路的开关状态可调,用于对整流后的直流电流进行开关和放大。
13.优选的,所述开关放大电路包括限流电阻r1、电阻r2和r3、电压比较器a、三极管t1、上拉电阻r4、可调电阻r5和下拉电阻r6,所述限流电阻r1一端接桥式整流电路的输出端正极、另一端接三极管t1的集电极,三极管t1的发射极作为开关放大电路的直流输出正极;电阻r2和电阻r3串联,电阻r2和电阻r3的公共节点连接电压比较器a的同相输入端,电阻r2上与电阻r3相背离的一端连接限流电阻r1与三极管t1集电极的公共节点,电阻r3上与电阻r2相背离的一端连接桥式整流电路的输出端负极;上拉电阻r4、可调电阻r5和下拉电阻r6依次串联,上拉电阻r4上与可调电阻r5相背离的一端连接三极管t1的发射极,下拉电阻r6上与可调电阻r5相背离的一端连接桥式整流电路的输出端负极,可调电阻r5的调节端连接电压比较器a的反相输入端,电压比较器a的输出端连接三极管t1的基极;所述桥式整流电路的输出端负极作为开关放大电路的直流输出负极。
14.优选的,所述直流正负极盲插电路还包括第一滤波电路,所述第一滤波电路包括电容c1,所述电容c1的两端分别连接桥式整流电路的输出端正极和输出端负极。
15.优选的,所述直流正负极盲插电路还包括第二滤波电路,所述第二滤波电路包括电容c2,所述电容c2的两端分别连接三极管t1的发射极和桥式整流电路的输出端负极。
16.优选的,所述运动控制器还包括人机交互单元,所述人机交互单元与主控单元通信连接。
17.本实用新型的有益效果是:本实施例的多轴ethercat总线运动控制器,不仅简化了结构,节省了线缆费用,同时支持ethercat总线驱动器以及普通脉冲+方向类型驱动器,在设备研发方面给予了更多的创造性以及可能性。所述运动控制单元提供一个基于开放的工业实时以太网络协议的ethercat总线接口,可以控制市面上基于标准ethercat总线控制协议的各种品牌伺服驱动器,最大可以控制32个ethercat总线驱动器;同时也提供了基于脉冲+方向协议的普通伺服驱动器控制接口,以满足对普通伺服驱动的控制需求。
附图说明
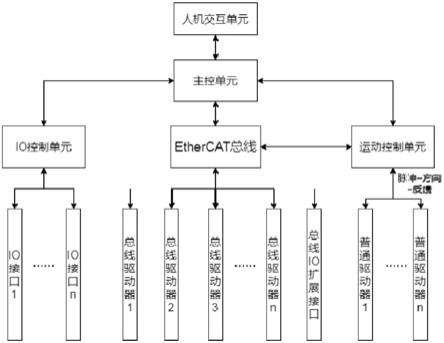
18.图1为本实用新型系统组成结构框图;
19.图2为本实用新型直流正负极盲插电路拓扑图。
具体实施方式
20.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
21.如图1所示,本实施例提供一种多轴ethercat总线运动控制器,包括主控单元以及分别和主控单元通信连接的运动控制单元和ethercat总线,所述ethercat总线基于开放的工业实时以太网络协议,所述运动控制单元与ethercat总线通信连接,所述ethercat总线上设有总线驱动器控制接口;所述运动控制单元上设有伺服驱动器控制接口,所述伺服驱动器控制接口基于脉冲+方向协议。
22.本实施例的多轴ethercat总线运动控制器,不仅简化了结构,节省了线缆费用,同时支持ethercat总线驱动器以及普通脉冲+方向类型驱动器,在设备研发方面给予了更多
的创造性以及可能性。所述运动控制单元提供一个基于开放的工业实时以太网络协议的ethercat总线接口,可以控制市面上基于标准ethercat总线控制协议的各种品牌伺服驱动器,最大可以控制32个ethercat总线驱动器;同时也提供了基于脉冲+方向协议的普通伺服驱动器控制接口,以满足对普通伺服驱动的控制需求。
23.本实施例中,主控单元为整个控制系统核心,其采用32bit risc结构的高速处理器,同时在主控单元供电上加入了直流正负极盲插电路设计,避免正负极电源接反造成硬件损坏。图2为此电路设计原理图。本实施例中的直流正负极盲插电路是通过如下方式实现的:所述主控单元的电源接口上设有直流正负极盲插电路,所述直流正负极盲插电路包括桥式整流电路和开关放大电路,所述桥式整流电路的输入端连接外部电源vi,所述桥式整流电路的输出端与开关放大电路并联,所述开关放大电路的开关状态可调,用于对整流后的直流电流进行开关和放大,以为本运动控制器提供工作电源vo。
24.进一步的,所述开关放大电路包括限流电阻r1、电阻r2和r3、电压比较器a、三极管t1、上拉电阻r4、可调电阻r5和下拉电阻r6,所述限流电阻r1一端接桥式整流电路的输出端正极、另一端接三极管t1的集电极,三极管t1的发射极作为开关放大电路的直流输出正极;电阻r2和电阻r3串联,电阻r2和电阻r3的公共节点连接电压比较器a的同相输入端,电阻r2上与电阻r3相背离的一端连接限流电阻r1与三极管t1集电极的公共节点,电阻r3上与电阻r2相背离的一端连接桥式整流电路的输出端负极;上拉电阻r4、可调电阻r5和下拉电阻r6依次串联,上拉电阻r4上与可调电阻r5相背离的一端连接三极管t1的发射极,下拉电阻r6上与可调电阻r5相背离的一端连接桥式整流电路的输出端负极,可调电阻r5的调节端连接电压比较器a的反相输入端,电压比较器a的输出端连接三极管t1的基极;所述桥式整流电路的输出端负极作为开关放大电路的直流输出负极。
25.桥式整流电路将外部输入的电流整流,当输入电源正插或反插,均能通过桥式整流电路的直流输出端输出方向稳定的直流电流。整流后的直流电通过限流电阻r1后,流到开关放大电路的三极管t1集电极,电阻r2和电阻r3组成一组分压电阻,为电压比较器a的同相输入端提供稳定的电压,上拉电阻r4、可调电阻r5和下拉电阻r6依次串联,通过调节可调电阻r5的阻值,可以调节电压比较器a的反相输入端电压,电压比较器a对其同相输入端电压和反向输入端电压进行比较,控制器输出端输出控制信号,该控制信号输入三极管t1基极,以控制三极管t1的导通与放大。当控制信号达到三极管t1的导通阈值时,三极管t1导通,三极管t1的发射极输出放大后的直流电,为本实施例的运动控制器提供工作电源。
26.本实施例中,如图2所示,所述直流正负极盲插电路还包括第一滤波电路,所述第一滤波电路包括电容c1,所述电容c1的两端分别连接桥式整流电路的输出端正极和输出端负极。电容c1对桥式整流电路输出的直流电进行滤波,将涌入的波动信号通过电容c1消耗掉,电容c1可采用电解电或容陶瓷电容等常用的电容。
27.本实施例中,如图2所示,所述直流正负极盲插电路还包括第二滤波电路,所述第二滤波电路包括电容c2,所述电容c2的两端分别连接三极管t1的发射极和桥式整流电路的输出端负极。电容c2对开关放大电路输出的直流电进行滤波,将开关放大电路开关瞬间的波动信号通过电容c2消耗掉,电容c2也可采用电解电或容陶瓷电容等常用的电容。
28.本实施例中,所述运动控制器还包括与所述主控单元通信连接的io控制单元,所述io控制单元上设有多路与io控制单元光电隔离的io接口,多路所述io接口分别通过io控
制单元与主控单元通信连接。优选的,所述ethercat总线上设有总线io扩展接口,所述总线io扩展接口通过ethercat总线与主控单元通信连接。本实施例中,所述io控制单元提供16入16出的光电隔离输入输出点位,同时支持ethercat总线io模块扩展,满足设备对于io点的多模式需求。同时每一个io点功能都可以通过程序指令进行自定义,如各轴正反限位,原点开关等,可以通过程序进行更改,避免接线错误更改接线的烦恼。
29.如图1所示,所述ethercat总线上设有多个总线驱动器控制接口,多个所述总线驱动器控制接口与总线io扩展接口串联。所述运动控制单元提供一个基于标准开放的工业实时以太网协议ethercat总线协议,可以通过一根rj45网线与具备ethercat总线功能的驱动器进行通讯与实时控制。免去了繁杂的接线,更减少了线缆之间的干扰。运动控制器目前最高可以同时控制32个ethercat总线驱动器,同时还提供了6个脉冲方向控制轴口,以满足控制普通控制方式伺服驱动器的需求。本实施例提供了多样化的控制方式,降低了设备开发难度,提供了多样化开发功能。
30.优选的,所述运动控制器还包括人机交互单元,所述人机交互单元与主控单元通信连接。所述人机交互单元包括一ethernet网络接口以及一个rs232串口和/或rs485串口,所述ethernet网络接口连接上位机,当然还可连接工业触摸屏,使用户可以通过上位机或工业触摸屏来控制所述运动控制器,所述rs232串口或rs485串口连接所述主控单元的通讯端,此外,需说明的是,ethernet是以邮袋为单位传送信息的区域网络,因此,需要通过协议来规定如何发送、接收这些邮袋。本实用新型提供的运动控制器支持tcp/ip和udp/ip两种工业标准协议,可以方便的与上位机pc或者工业触摸屏通信,进行人机交互和运动控制操作。
31.工作原理:
32.本实施例提供的一种多轴ethercat总线运动控制器,包括主控单元、人机交互单元、io控制单元和运动控制单元,主控单元通过ethercat总线与运动控制单元通信连接。基于开放的工业实时以太网络协议的运动控制器,可以与上位pc和触摸屏等人机界面相连接,组成上位控制;与基于开放的工业实时以太网络协议的驱动器或者普通脉冲+方向控制类型的驱动器相连接,组成下位控制。本实施例不仅简化了结构,节省了线缆费用,同时支持电源接口正反插功能、支持ethercat总线驱动器以及普通脉冲+方向类型驱动器,在设备研发方面给予了更多的创造性以及可能性。
33.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1