一种无人机室内探索辅助方法及系统
1.本发明涉及无人设备室内探索技术领域,尤其涉及一种无人机室内探索辅助方法及系统。
背景技术:
2.现有无人机在未知房间探索过程中,采用无人机进行探索,利用深度相机完成对房间的三维建模,在这个过程中,需要深度相机完整的对室内环境进行扫描,由于室内环境复杂,无人机无法自动寻找合理飞行路径、避开障碍物,需要人工实时通过设置在无人机上的摄像头对传输出的环境图像进行判断,给予无人机飞行指示,避开障碍物,逐步获得房间的飞行路径,由于摄像头能提供的视野范围极小,且环境复杂,这个过程就变得十分缓慢,并且需要工作人员非常仔细对图像进行判断,探索效率会受到工作人员的对环境图像判断经验及长时间观察带来的疲惫所影响。
技术实现要素:
3.针对上述现有的无人机在对未知房间的探索效率受工作人员的经验及疲惫度影响,提供利用人机车对环境进行探索,对房间建立二维地图,无需人工对环境进行环境图像识别,并辅助无人机进行对未知房间快速探索的一种无人机室内探索辅助方法及系统。
4.为解决上述技术问题,本发明提供一种无人机室内探索辅助方法,包括以下步骤:
5.s1、用户端向数辆无人车发送工作指令,控制数辆无人车进入指定房间;
6.s2、数辆无人车对指定房间的边界及障碍物进行探测,建立二维地图,并将二维地图上传至用户端;
7.s3、数辆无人车分别前往指定房间的数个角落,作为uwb基站,发送uwb搜索信号;
8.s4、用户端向无人机发送工作指令,控制无人机进入指定房间;
9.s5、数个uwb基站对无人机进行实时定位,并将定位信息上传至用户端;
10.s6、用户端接收实时定位信息并呈现在二维地图上;
11.s7、用户端向无人机发送飞行路线;
12.s8、无人机根据飞行路线完成探索任务。
13.本发明采用无人车对房间的边界及障碍物建立二维地图,在房间内建立数个uwb基站,对障碍物在地图上显示,对无人机进行实时定位,在二维地图上显示为无人机的实时位置,对无人机的飞行路线作出快速明确的路线规划,控制无人机快速完成未知房间的探索任务。
14.进一步的,所述步骤s2中,无人车采用激光雷达对房间进行探测。
15.进一步的,所述步骤s2中,无人车通过rrt算法将探测到的信息进行运算,建立二维地图。
16.进一步的,所述步骤s5中,数个uwb基站发射uwb搜索信号,对安装在无人机上的uwb定位标签进行实时定位。
17.一种无人机室内探索辅助系统,包括:
18.无人车,所述无人车用于接收工作指令信息;对指定房间进行探测;建立指定房间边界及障碍物的二维地图,并将二维地图上传;作为uwb基站对uwb定位标签进行搜索及实时定位,并实时上传定位信息;
19.无人机,所述无人机用于接收工作指令信息;回应uwb搜索信号;对指定房间进行探索,并上传探索数据;
20.用户端,所述用户端用于向无人车及无人机发送工作指令信息;接收无人车发送的二维地图及实时定位信息;接收无人机发送的探索数据。
21.进一步的,所述无人车包括:
22.激光雷达,所述激光雷达用于对指定房间边界及障碍物进行探测;
23.第一数据接收模块,所述第一数据接收模块用于发送及接收无线信号;
24.uwb模块,uwb模块用于在指定房间内发送uwb搜索信号,对uwb定位标签进行搜索并对其进行实时定位;
25.第一板卡,所述第一板卡用于处理第一数据接收模块接收到的信息;基于激光雷达的探测数据通过rrt算法完成二维地图的建立;通过第一数据接收模块向用户端发送二维地图信息及uwb定位标签的实时定位信息。
26.进一步的,所述无人机包括:
27.第二数据接收模块,所述第二数据接收模块用于发送及接收无线信号;
28.uwb定位标签,所述uwb定位标签用于回应无人车发出的uwb搜索信号;
29.探索模块,所述探索模块用于完成对指定房间内的探索任务,得到探索数据;
30.第二板卡,所述第二板卡用于处理第二数据接收模块接收到的信息;通过第二数据接收模块向用户端发送探索模块收集到的数据。
31.相比于现有技术,本发明的优点及有益效果在于:本发明通过无人车作为uwb基站,建立房间及障碍的二维地图,对无人机进行实时定位,在二维地图上规划无人机的飞行路线,直接控制无人机采用规划的路线进行快速探索,替代当前人工对环境进行环境图像识别“走一步,看一步”的方式,提升了无人机的探索效率,降低工作人员控制无人机探索过程的工作疲劳度。
附图说明
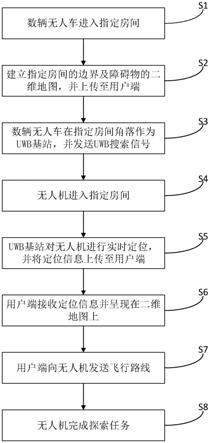
32.图1为本发明的方法流程示意图;
33.图2为本发明的实施例中在单一房间内uwb基站与无人机位置示意简图;
34.图3为本发明的实施例中建立的数个房间的二维地图及其飞行路线图。
具体实施方式
35.为了使本发明的目的、技术方案及优点更加清楚明白,下面通过具体实施方式结合附图对本发明做具体详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
36.如图1所述,一种无人机室内探索辅助方法,包括以下步骤:
37.s1、用户端向数辆无人车发送工作指令,控制数辆无人车进入指定房间;
38.s2、数辆无人车对指定房间的边界及障碍物进行探测,建立二维地图,并将二维地图上传至用户端;
39.s3、数辆无人车分别前往指定房间的数个角落,作为uwb基站,发送uwb搜索信号;
40.s4、用户端向无人机发送工作指令,控制无人机进入指定房间;
41.s5、数个uwb基站对无人机进行实时定位,并将定位信息上传至用户端;
42.s6、用户端接收实时定位信息并呈现在二维地图上;
43.s7、用户端向无人机发送飞行路线;
44.s8、无人机根据飞行路线完成探索任务。
45.当无人机完成当前房间探索任务后,若后续还有房间需要探索,则循环进行步骤s1-s8;若后续没有房间需要探索,则无人机及无人车根据二维地图从房间内快速撤出。
46.在实际应用中,房间多为方形结构,但也可能为多边形或是各种不规则结构,若工作人员无法事先知道房间结构,为保险起见,可派出6辆无人车;若能事先知道房间结构,则派出其所需对应数量的无人车。
47.本发明采用无人车对房间的边界及障碍物建立二维地图,在房间内建立数个uwb基站,对障碍物在地图上显示,对无人机进行实时定位,在二维地图上显示为无人机的实时位置,对无人机的飞行路线作出快速明确的路线规划,控制无人机快速完成未知房间的探索任务。
48.具体的,步骤s2中,无人车采用激光雷达对房间进行探测。数个激光雷达向房间的边界及障碍物发射激光束,然后将接收到的从反射回来的回波,将回拨与发射的激光束进行比较,吃数据进行处理后,就可获得房间边界及障碍物的相关信息。
49.具体的,步骤s2中,无人车通过rrt算法将探测到的信息进行运算,建立二维地图。
50.具体的,步骤s5中,数个uwb基站发射uwb搜索信号,对安装在无人机上的uwb定位标签进行实时定位。
51.一种无人机室内探索辅助系统,包括:
52.无人车,无人车用于接收工作指令信息;对指定房间进行探测;建立指定房间边界及障碍物的二维地图,并将二维地图上传;作为uwb基站对uwb定位标签进行搜索及实时定位,并实时上传定位信息;
53.无人机,无人机用于接收工作指令信息;回应uwb搜索信号;对指定房间进行探索,并上传探索数据;
54.用户端,用户端用于向无人车及无人机发送工作指令信息;接收无人车发送的二维地图及实时定位信息;接收无人机发送的探索数据。
55.具体的,无人车包括:
56.激光雷达,激光雷达用于对指定房间边界及障碍物进行探测;
57.第一数据接收模块,第一数据接收模块用于发送及接收无线信号;
58.uwb模块,uwb模块用于在指定房间内发送uwb搜索信号,对uwb定位标签进行搜索并对其进行实时定位;
59.第一板卡,第一板卡用于处理第一数据接收模块接收到的信息;基于激光雷达的探测数据通过rrt算法完成二维地图的建立;通过第一数据接收模块向用户端发送二维地图信息及uwb定位标签的实时定位信息。
60.具体的,无人机包括:
61.第二数据接收模块,第二数据接收模块用于发送及接收无线信号;
62.uwb定位标签,uwb定位标签用于回应无人车发出的uwb搜索信号;
63.探索模块,探索模块用于完成对指定房间内的探索任务,得到探索数据;
64.第二板卡,第二板卡用于处理第二数据接收模块接收到的信息;通过第二数据接收模块向用户端发送探索模块收集到的数据。
65.实施例,如图2所示,在一个方形房间内,4辆无车人分别前往房间的4个角落,作为4个uwb基站,无人机进入房间中,由4个基站对无人机进行精确定位,并在用户端呈现。
66.如图3所示,由数个房间组成的一个不规则的二维地图,由uwb建立的二维地图能精确显示房间的边界以及房间中的障碍物,由计算机应用程序对地图进行快速识别,给出最佳的飞行路线,由人工根据路线通过用户端向无人机发送所需求的飞行路线,由无人机的探索模块完成探索任务。
67.在整个工作流程中,通过无人车快速得到房间的边界及障碍物的二维地图,快速获得最佳路线,工作人员仅需要根据不同需要,选择不同的飞行路线,快速完成对指定房间的快速探索任务。相较于传统的探索方式(根据摄像头传回的图像“走一步,看一步”),本发明提供的方法及系统,具有实质性特点和显著的进步。
68.以上内容是结合具体的实施方式对本发明所做的具体详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1