一种近程电容的高速目标识别系统及方法
1.本发明涉及高速目标识别技术领域,尤其是一种近程电容的高速目标识别系统及方法。
背景技术:
2.随着科技的不断发展,高速目标识别在军事、航空航天和工业生产等领域开始有着广阔的应用前景,因此对其展开研究具有重要的理论价值和实践意义。
3.传统雷达等方式对高速运动目标检测的第一步是对目标回波信号进行建模,从而建立高速运动点目标的回波模型,但高速运动目标的回波信噪比往往比较低,雷达系统在进行处理时需要一段时间将观测信息存储起来,然后再统一处理,因此对于近程高速目标而言,传统雷达等方式检测是不适用的。
4.高速目标运动具有机动性强、运动时间短、环境多变、规律性差等特点,相比传统的雷达等检测方法,难以对其位置、姿态和速度等运动信息进行捕获和测量,由于在近程高速目标识别领域,传统雷达等方式无法及时做出系统响应,因此本发明提出了一种近程电容的高速目标识别系统及方法。
技术实现要素:
5.本发明的首要目的在于提供一种能够提高系统对高速目标识别的准确度,实现近程高速目标识别的功能,丰富高速目标识别领域内容的近程电容的高速目标识别系统。
6.为实现上述目的,本发明采用了以下技术方案:一种近程电容的高速目标识别系统,包括:
7.多通道电容传感器检测电路,用于探测目标信息,对每个通道传感器信号进行隔离;
8.信号调理电路,用于对信号进行预处理,包括带通滤波器、信号放大、低通滤波;
9.ad采集电路,用于采集信号调理电路的输出信号;
10.主控制器,用于对所采集的数据进行信号处理,实现对高速目标的距离、方位的检测与目标识别;
11.指示灯电路,用于指示高速目标探测状态;
12.电源电路,用于对多通道电容传感器检测电路、信号调理电路、主控制器供电;
13.所述多个多通道电容传感器检测电路的输出端均与信号调理电路的输入端相连,信号调理电路的输出端与ad采集电路的输入端相连,ad采集电路与主控制器双向通讯,主控制器的第一信号输出端与指示灯电路的输入端相连。
14.所述多通道电容传感器检测电路采用用于检测电场变化并将电场变化信号转化为电压变化信号的探测电极;所述信号调理电路采用lm7332芯片;所述主控制器采用xc7z020芯片;所述指示灯电路采用led灯。
15.所述ad采集电路包括:
16.adg706模拟多路复用器,实现16路采集通道的设计;
17.ad9220模数转换器,实现对调理之后的信号采集;
18.rs2266模拟开关,用于处理模拟信号和数字信号,实现对虚拟地的切换,防止不同的采集通道因为共地而相互影响;
19.adg706模拟多路复用器的输入端连接信号调理电路的输出端,adg706模拟多路复用器的输出端连接ad9220模数转换器的输入端;ad9220模数转换器的输出端连接主控制器的信号输入端;
20.rs2266模拟开关的输入端连接多个多通道电容传感器检测电路的虚拟地,输出端接近程电容的高速目标识别系统的地线;
21.adg706模拟多路复用器、ad9220模数转换器、rs2266模拟开关的控制端均与主控制器的第二输出端相连。
22.所述电源电路包括:
23.第一电源电路,采用tps54335adrcr模块,用于将28v直流电转24v直流电,为多通道电容传感器检测电路提供24v的电压,为xr12/24d15-15模块提供24v的输入电压;
24.第二电源电路,采用一个xr12/24d15-15模块,用于将24v直流电转
±
15v直流电,为信号调理电路提供
±
15v电压;
25.第三电源电路,采用两个xr12/24d15-15模块并联,用于将24v直流电转
±
5v直流电,用于为信号调理电路提供
±
5v电压,为主控制器提供5v的电压。
26.本发明的另一目的在于提供一种近程电容的高速目标识别系统的识别方法,该方法包括下列顺序的步骤:
27.(1)多通道电容传感器检测电路检测多路传感器信号;
28.(2)信号调理电路对每一路电容的信号进行调理;
29.(3)ad采集电路对调理之后的信号进行采样处理、并储存;
30.(4)利用采样处理的信号训练目标识别深度学习模型,并得到训练好的权重和偏置;
31.(5)主控制器通过训练好的权重和偏置进行识别;
32.(6)指示灯电路通过串行接口显示高速目标探测状态。
33.所述步骤(3)具体包括以下步骤:
34.(3a)依次选取最新采集的5个点的采样值,分别为d1~d5,其中d1为最新采集的第一个点的采样值,d
i-1
为di前一次采集的采样值;
35.(3b)对最新采集的5个点的采样值,求平均数,即:
[0036][0037]
(3c)将平均数d乘51,使采集的数据范围在0~255之间,然后转换成16进制帧格式存储在sd卡中。
[0038]
所述步骤(4)具体包括以下步骤:
[0039]
(4a)读取储存在sd卡中的帧格式数据,把16进制字符串分割成数字列表;
[0040]
(4b)把分割之后的数字列表划分为训练集与测试集;
[0041]
(4c)通过训练集训练深度学习模型,得到训练好的权重和偏置;
[0042]
(4d)通过测试集测试训练完成的深度学习模型。
[0043]
所述步骤(5)具体包括以下步骤:
[0044]
(5a)首先将训练好的权重和偏置存储到sd卡中,再将sd卡存储的数据导入到ddr双倍速率同步动态随机存储器中;
[0045]
(5b)主控制器通过dma直接存储器,把ddr双倍速率同步动态随机存储器中存储的数据分块输入到主控制器内的ram随机存取存储器中;dma直接存储器、ddr双倍速率同步动态随机存储器和主控制器均布置在mizar 7开发板上;
[0046]
(5c)调用主控制器的fpga端ip核,进行卷积、累加、池化、填充操作;
[0047]
(5d)将主控制器的输出数据通过dma直接存储器传输到ddr双倍速率同步动态随机存储器中;
[0048]
(5e)最后在主控制器的arm端调用激活函数运算,输出识别结果。
[0049]
由上述技术方案可知,本发明的有益效果为:第一,本发明采用具有强大的并行处理能力的主控制器,使得系统响应时间快,可以检测500m/s速度以上的运动目标;第二,采用机器学习实现对目标识别精度的提高以及可以实现防止误操作检测的情况发生;第三,采用电容检测的方法,能够提高系统对高速目标识别的敏感度和准确度;第四,采用采集通道隔离地的方法,实现对多路采集通道的合理控制,各通道互不影响,提高了系统对高速目标识别的准确度;第五,实现了近程高速目标识别的功能,丰富了高速目标识别领域的内容。
附图说明
[0050]
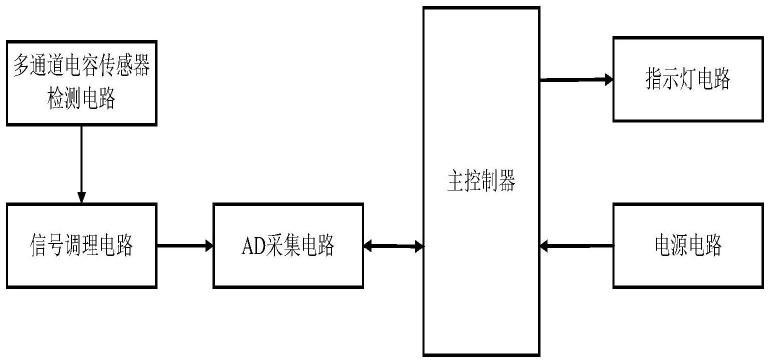
图1为本发明的系统原理框图。
[0051]
图2为本发明的方法流程图。
具体实施方式
[0052]
如图1所示,一种近程电容的高速目标识别系统,包括:
[0053]
多通道电容传感器检测电路,用于探测目标信息,对每个通道传感器信号进行隔离;
[0054]
信号调理电路,用于对信号进行预处理,包括带通滤波器、信号放大、低通滤波;
[0055]
ad采集电路,用于采集信号调理电路的输出信号;
[0056]
主控制器,用于对所采集的数据进行信号处理,实现对高速目标的距离、方位的检测与目标识别;
[0057]
指示灯电路,用于指示高速目标探测状态;
[0058]
电源电路,用于对多通道电容传感器检测电路、信号调理电路、主控制器供电;
[0059]
所述多个多通道电容传感器检测电路的输出端均与信号调理电路的输入端相连,信号调理电路的输出端与ad采集电路的输入端相连,ad采集电路与主控制器双向通讯,主控制器的第一信号输出端与指示灯电路的输入端相连。
[0060]
所述多通道电容传感器检测电路采用用于检测电场变化并将电场变化信号转化为电压变化信号的探测电极;所述信号调理电路采用lm7332芯片;所述主控制器采用
xc7z020芯片;所述指示灯电路采用led灯。
[0061]
所述ad采集电路包括:
[0062]
adg706模拟多路复用器,实现16路采集通道的设计;
[0063]
ad9220模数转换器,是12位新一代高性能模数转换器,具有灵活的采样速率和低功耗的特点,实现对调理之后的信号采集;
[0064]
rs2266模拟开关,是一个双向双通道单刀单掷的模拟开关,用于处理模拟信号和数字信号,实现对虚拟地的切换,防止不同的采集通道因为共地而相互影响;
[0065]
adg706模拟多路复用器的输入端连接信号调理电路的输出端,adg706模拟多路复用器的输出端连接ad9220模数转换器的输入端;ad9220模数转换器的输出端连接主控制器的信号输入端;
[0066]
rs2266模拟开关的输入端连接多个多通道电容传感器检测电路的虚拟地,输出端接近程电容的高速目标识别系统的地线;
[0067]
adg706模拟多路复用器、ad9220模数转换器、rs2266模拟开关的控制端均与主控制器的第二输出端相连。
[0068]
所述电源电路包括:
[0069]
第一电源电路,采用tps54335adrcr模块,用于将28v直流电转24v直流电,为多通道电容传感器检测电路提供24v的电压,为xr12/24d15-15模块提供24v的输入电压;
[0070]
第二电源电路,采用一个xr12/24d15-15模块,用于将24v直流电转
±
15v直流电,为信号调理电路提供
±
15v电压;
[0071]
第三电源电路,采用两个xr12/24d15-15模块并联,用于将24v直流电转
±
5v直流电,用于为信号调理电路提供
±
5v电压,为主控制器提供5v的电压。
[0072]
如图2所示,本方法包括下列顺序的步骤:
[0073]
(1)多通道电容传感器检测电路检测多路传感器信号;
[0074]
(2)信号调理电路对每一路电容的信号进行调理;
[0075]
(3)ad采集电路对调理之后的信号进行采样处理、并储存;
[0076]
(4)利用采样处理的信号训练目标识别深度学习模型,并得到训练好的权重和偏置;
[0077]
(5)主控制器通过训练好的权重和偏置进行识别;
[0078]
(6)指示灯电路通过串行接口显示高速目标探测状态。
[0079]
所述步骤(3)具体包括以下步骤:
[0080]
(3a)依次选取最新采集的5个点的采样值,分别为d1~d5,其中d1为最新采集的第一个点的采样值,d
i-1
为di前一次采集的采样值;
[0081]
(3b)对最新采集的5个点的采样值,求平均数,即:
[0082][0083]
(3c)将平均数d乘51,使采集的数据范围在0~255之间,然后转换成16进制帧格式存储在sd卡中。
[0084]
所述步骤(4)具体包括以下步骤:
[0085]
(4a)读取储存在sd卡中的帧格式数据,把16进制字符串分割成数字列表;
[0086]
(4b)把分割之后的数字列表划分为训练集与测试集;
[0087]
(4c)通过训练集训练深度学习模型,得到训练好的权重和偏置;
[0088]
(4d)通过测试集测试训练完成的深度学习模型。
[0089]
所述步骤(5)具体包括以下步骤:
[0090]
(5a)首先将训练好的权重和偏置存储到sd卡中,再将sd卡存储的数据导入到ddr双倍速率同步动态随机存储器中;
[0091]
(5b)主控制器通过dma直接存储器,把ddr双倍速率同步动态随机存储器中存储的数据分块输入到主控制器内的ram随机存取存储器中;dma直接存储器、ddr双倍速率同步动态随机存储器和主控制器均布置在mizar 7开发板上;
[0092]
(5c)调用主控制器的fpga端ip核,进行卷积、累加、池化、填充操作;
[0093]
(5d)将主控制器的输出数据通过dma直接存储器传输到ddr双倍速率同步动态随机存储器中;
[0094]
(5e)最后在主控制器的arm端调用激活函数运算,输出识别结果。
[0095]
在工作时,多通道电容传感器检测电路检测外部是否有近程目标,然后将检测到的信号输入信号调理电路,经过信号调理电路对信号的调理,信号被ad采集电路所采集,将采集的信号储存在主控制器中,进行对高速目标的识别,最后将识别的结果通过指示灯显示出来。
[0096]
本发明的技术特点为:精确、灵敏、平稳、有效。本发明的技术优势为:集成度高、功能强、体积小、速度快、存储量大、抗干扰性强、性价比高、通用性好、推广范围大、工作可靠、指示准确、使用寿命长、标准化系数高等。
[0097]
本发明实现对近程高速目标的准确识别,并能够根据指示灯给出相应的识别结果,代替了传统雷达等高速目标检测的方法,本识别方法比传统检测响应时间更快、灵敏度更高、准确度更高,可以实现检测500m/s速度以上的运动目标。本发明结构简单、准确率高、智能化程度高,能够有效的实现近程高速目标的识别。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1