一种实现控制器多点输入与输出的矩阵式扩展方法与流程
→
y2,此时负载l1处于高电平状态,其他负载都处于低电平状态,从而使负载l1工作。
8.当控制器输入端x0~xm接入脉冲信号或开关量信号时,矩阵拓展输入电路中增加了二极 管,各个控制器输入端和与该控制器输入端相连的电路输出点之间均连接一个二极管,矩阵 拓展输入电路每行除与控制器输入端相连的电路输出点外,其余相邻电路输出点之间连接有 一个二极管;矩阵拓展输入电路的行与列的各个交点均为电路输出点。
9.所述开关k1、k4~k6均为继电器。
10.所述控制器为plc控制器、stm32微控制器或51单片机。
11.当控制器为plc控制器时,输入扩展采用梯形图程序控制,对控制器输出端设置掉电延 时时间,即当扫描完矩阵拓展输出电路第一列的控制器输出端后,其余列的控制器输出端依 次延长一段时间才开始执行扫描,在这个时间段内所有的控制器输出端都处于无信号状态。
12.所述掉电延时时间为20~30ms。
13.与现有技术相比,本发明的有益效果如下:
14.1、本发明在输出扩展中首次采用了电路隔离技术,以消除矩阵拓展输出电路中不同行 与列之间存在的信号串扰而导致输出电压不稳定的问题,抗干扰能力强;如图3所示,当矩 阵扩展输出电路中的负载l1和l6接通时,若不设置隔离电路,由于电磁干扰使得负载l4和 l3上也会存在介于0~24v的电压,导致矩阵扩展输出电路的行与列之间存在信号串扰,因此 通过隔离单元切断负载之间的电磁干扰而产生的寄生回路,避免电路中不同行与列的负载同 时接通时,影响相应行与列交点处的负载,提高了输入与输出扩展的可靠性,保证各输出点 能够稳定驱动负载。此外,隔离单元还能起到负载与输出点之间的隔离作用,可广泛应用于 各类控制器,有效简化了扩展方式。
15.2、扩展输出中采用继电器控制工作电路的通断,阻抗低,降低电压的损耗,有效地提 高了系统的运行效率。
16.3、本发明可以降低因为输入信号的宽度小于列间扫描时间而造成的误差率,提高信号 捕捉成功率;同时当扫描间隔较短,还未执行负载驱动子程序时,该方法可以增加信号保持 时间,提高程序运行稳定性。对于plc控制器而言,输入拓展通过梯形图程序驱动,当控制 精度要求较高时,plc控制器的负载驱动子程序执行时间往往会大于梯形图程序的矩阵扫描 时间,这就导致负载驱动子程序未执行完毕时,梯形图程序已经执行第二遍了,这时负载驱 动子程序则会出现执行冲突,使负载出现误动作,因此对各个控制器输出端设置掉电延时时 间,使矩阵拓展输出电路的第一列的控制器输出端后,其余列的控制器输出端依次延长一段 时间才开始执行扫描,在这个时间段内所有的控制器输出端都处于无信号状态,以提高负载 驱动子程序的执行效率,避免负载出现误动作。
17.4、本发明方法提高了控制器输入/输出点的利用效率,减少控制器输入/输出点的实际使 用数量,缩小控制系统的体积,节约了成本,提升控制程序的运行效率。
附图说明
18.图1为本发明的其中一种输入拓展方式的电路图;
19.图2为本发明的另一种输入拓展方式的电路图;
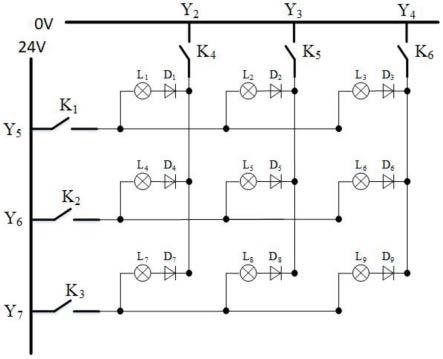
20.图3为本发明的输出拓展的电路图;
21.图4为本发明的梯形图程序扫描时序图;
22.图5为本发明的多点卸料机的结构示意图;
23.图6为本发明的多点卸料机输入/输出扩展模型的硬件连接图;
24.图中,1-卸料机主体;2-进料口;3-出料口;4-驱动电机;5-料斗;6-气缸;7-锥形导嘴; 8-传动链;9-导向轮;10-牵引绳;11-滑块;12-挤压弹簧;13-卸料板;14-从动轮;15-螺柱;
25.100、xyj-krdzk-32mt集成控制模块;200、4
×
3二极管隔离模块;300、输入传感 模块;400、继电器模块;500、输出负载模块;600、3
×
3二极管隔离模块。
具体实施方式
26.下面结合附图和具体实施例对本发明的技术方案进行详细描述,但并不用于限制本技术 的保护范围。
27.本发明为一种实现控制器多点输入与输出的矩阵式扩展方法(简称方法),包括输入拓 展和输出拓展;假设控制器输入端为x,输出端为y,输入端x包括控制器输入端x0~xm, 输出端y包括控制器输出端y0~yn,则矩阵拓展输入电路的大小为m
×
n,即该矩阵拓展输入 电路可以拓展的输入点数为m
×
n,m、n均为正整数;假设输出拓展中用于行间拓展的控制 器输出端为y0~yi,用于列间拓展的控制器输出端为yj~yn,则矩阵拓展输出电路的大小为 i
×
(n-j),即该矩阵拓展输出电路可以拓展的输出点数为i
×
(n-j),i≠j;矩阵拓展输入电路的行 与列的交点表示电路输出点,即o
0,0
~o
m,n
表示电路输出点;
28.当控制器输入端x0~xm接入脉冲信号时,采用图1所示的拓展方式,要求矩阵拓展输入 电路不同行与列的信号间互斥,即不同时处于高电平,控制器输入端x0~xm的信号宽度大于 控制器输出端y0~yn轮流导通一遍的时间,否则可能出现丢失控制器输入信号的情况;将控 制器输出端y0~yn轮流置为高电平,则控制器输入端x轮流得到n+1组输入状态;例如,当 控制器输出端y0接通时,读入电路输出点o
0,0
~o
m,0
的状态,以控制器输入端x0为拓展点, 则外部电流从控制器输入端x0流出,经过x0→
y0,再经过控制器输出端y0的触点,从控制 器输出端y0的公共端com流出,最后流回控制器输入端x0的com端,从而使控制器输 入端x0接通;
29.当控制器输入端x0~xm接入脉冲信号或开关量信号时,采用图2所示的拓展方式,不要 求信号之间有较强的逻辑关系,矩阵拓展输入电路中增加了二极管,各个控制器输入端和与 之相连的电路输出点之间均连接一个二极管,矩阵拓展输入电路每行除与控制器输入端相连 的电路输出点外,其余相邻电路输出点之间连接有一个二极管;若控制器输入端接入开关量 信号,并且采用图1的拓展方式时,矩阵拓展输入电路会出现不同列之间的信号串扰,例如 当控制器输入端x0接入开关量信号时,控制程序扫描到控制器输出端y0时,电流流向为x0→
y0,此时若扫描到控制器输出端y1时会导致电路输出点o
0,0
和o
0,1
同时输出高电平,这样 就形成了信号串扰,而二极管可以消除由于开关量信号造成的信号串扰,保持电路的稳定运 行;二极管可以是整流二极管或肖特基二极管;当控制器输出端y0接通时,读入电路输出 点o’0,0
~o’m,0
的状态,以控制器输入端x0为拓展点,则外部电流从控制器输入端x0流出, 经过x0→
d1→
y0,再经过控制器输出端y0的触点,从控制器输出端的公共端com流出, 最后流回控制器输入端的com端,从而使控制器输入端x0接通;d1表示位于控制器
输入 端x0与电路输出点o’0,0
之间的二极管;
30.图3为输出拓展的电路图,输出扩展结合了电路隔离技术;矩阵拓展输出电路行与列的 各个控制器输出端之间均设有负载,每个负载分别通过隔离单元和与该负载相连且位于矩阵 拓展输出电路列上的控制器输出端连接;隔离单元为二极管,二极管的正极与负载连接,负 极与控制器输出端连接;例如,矩阵拓展输出电路用于行间拓展的控制器输出端为y5、y6、 y7,用于列间拓展的控制器输出端为y2、y3、y4,则控制器输出端y5的开关k1的一端经过 负载l1与二极管d1的正极连接,二极管d1的负极与控制器输出端y2的开关k4的一端连接, 控制器输出端y5的开关k1的一端经过负载l2与二极管d2的正极连接,二极管d2的负极与 控制器输出端y3的开关k5的一端连接,控制器输出端y5的开关k1的一端经过负载l3与二 极管d3的正极连接,二极管d3的负极与控制器输出端y4的开关k6的一端连接,控制器输 出端y5的开关k1的另一端接入高电平,开关k4~k6的另一端接入低电平,其余行的控制器 输出端与各个列的控制器输出端连接方式同理;当控制器输出端y2与y5导通时,外部电流 流向为y5→
k1→
l1→
d1→
k4→
y2,此时负载l1处于高电平状态,其他负载都处于低电平状 态(电压为0v),从而使负载l1工作;隔离电路是为了消除矩阵拓展输出电路不同行和不 同列之间存在的信号串扰,保证控制器输出信号的稳定性;
31.要使某个负载工作,只要控制矩阵拓展输出电路中该负载所在的行与列对应的控制器输 出端的开关接通即可,当某一行对应的控制器输出端的开关接通时,各列对应的控制器输出 端的开关才有可能接通;或者当只有某一列的控制器输出端的开关接通时,各行对应的控制 器输出端才有可能接通;随意接通矩阵拓展输出电路任一行和列的负载,矩阵拓展输出电路 中不会产生信号串扰。
32.要求控制器的输入端和输出端存在电平差,即一端是高电平,另一端是低电平;各个控 制器输出端的开关均为普通继电器;若控制器是stm32微控制器,它可以定义引脚为上拉 模式或下拉模式,假设引脚1定义为上拉模式(高电平),引脚2定义为下拉模式(低电平), 则引脚1相当于控制器输入端x0,引脚2相当于控制器输出端y0,在输入拓展中外部电流 流向为引脚1
→
d1→
引脚2;对于输出扩展,只需要预先定义stm32微控制器任意两个引脚 为浮空输入模式(依靠外部信号定义电平),矩阵拓展输出电路的行信号接入低电平,列信 号接入高电平。控制器还可以为51单片机等其他控制器,输入与输出的矩阵式拓展方式同 理。
33.当控制器为plc控制器时,输入扩展采用梯形图程序控制,如图4所示,梯形图程序逐 行扫描,当对控制器输出端y0、y1进行扫描,即将控制器输出端y0和y1轮流置为高电平, 控制器输入端x0、x1均由外部输入信号驱动,m0、m1分别为控制器输入端x0、x1的驱动 信号的有效辅助位;若在控制器输出端y0处于高电平末尾的时候,将控制器输入端x0的驱 动信号置为高电平,产生一个高脉冲将辅助位m0的信号置为高电平;而在某些工况下,例 如两个开关同时按下的情况,当控制器输出端y0处于高电平末尾的时候,控制器输入端x0的驱动信号消失,控制器输出端y1处于高电平,将控制器输入端x1的驱动信号置为高电平, 产生一个高脉冲,将辅助位m1的信号置为高电平,此时辅助位m0与m1存在一个共存的时 间段,虽然时间较短,但是这个时间段不能忽略,容易造成负载误动作;因此,为了消除辅 助位m0与m1共存的时间段,对控制器输出端设置掉电延时时间,掉电延时时间是指当扫描 完矩阵拓展输出电路的第一列的控制器输出端后,其余列的控制器输出端依次延长一段时间 才开始执
行扫描,在这个时间段内所有的控制器输出端都处于无信号状态,以克服由于plc 控制器的梯形图程序执行时间大于扫描时间而造成的负载误动作的缺陷;掉电延时时间通常 取20~30ms。
34.实施例
35.本实施例以多点卸料机的plc控制系统为例,说明实现控制器多点输入与输出的矩阵式 扩展方法。多点卸料机的结构示意图如图6所示,包括卸料机主体1、进料口2、出料口3、驱 动电机4、料斗5、气缸6、锥形导嘴7、传动链8、导向轮9、牵引绳10、滑块11、挤压弹簧12、 卸料板13、从动轮14和螺柱15,工作原理为:物料从进料口2进入卸料机,驱动电机4带动从 动轮14工作,物料被提升至料斗5处,若物料在该料斗处进行卸料,则控制该料斗处的气缸6 工作,将料斗打开进行卸料。
36.本实施例将控制器多点输入与输出的矩阵式扩展方法应用于五点卸料机的工作场景,使 用xyj-krdzk-32mt集成控制器作为主控单元,xyj-krdzk-32mt集成控制器的输入点数 16点,输出点数16点;针对五点卸料机的工作流程,各控制对象的信号特点如下表所示;
37.表1各控制对象的信号特点
[0038][0039]
与单点卸料机的工艺相比,五点卸料机工艺存在手动卸料和自动卸料切换的过程,并且 存在两个料仓同时卸料的情况,此时输入信号中阻旋料位计信号和磁簧信号同时存在多个高 电平状态,输出信号中料仓灯存在多个信号同时存在多个高电平状态;依据控制需求,五点 卸料机的控制器一共需要23个输入点数和13个输出点数,因此采用本发明的方法对 xyj-krdzk-32mt集成控制器的输入点数和输出点数进行拓展,本实施例采用3路输出点和 4路输入点的输入拓展,一共扩展12路输入点,采用3路输出点和3路输出点的输出扩展,一 共拓展9路输出点;
[0040]
本实施例设计的矩阵式输入输出扩展系统如图6所示,包括xyj-krdzk-32mt集成控制 模块100、4
×
3二极管隔离模块200、输入传感模块300、继电器模块400、输出负载模块
500 和3
×
3二极管隔离模块600;xyj-krdzk-32mt集成控制模块100是以三菱fx2n为控制核心 的32路控制器,包括16路输入单元和16路输出单元,与传统的fx2n plc不同的是, xyj-krdzk-32mt集成控制模块100可以灵活切换继电器输出模式和晶体管输出模式,同 时,yj-krdzk-32mt集成控制模块100搭载了rs485、rs232和can总线通信方式,可以与 其他控制模块进行数据传输;由于矩阵扩展要求的列间扫描间隔较短,因此采用晶体管输出 模式,可以实现高速输出,驱动伺服驱动器、步进电机等;4
×
3二极管隔离模块200采用整 流二极管或肖特基二极管,肖特基二极管的隔离滤波效果优于整流二极管,因此本实施例采 用肖特基二极管,肖特基二极管的负极接入输入传感模块300,肖特基二极管的正极接入 xyj-krdzk-32mt集成控制模块100的输入端x5、x6、x7和x
10
;4
×
3二极管隔离模块200体 积小,易安装于控制柜中;输入传感模块300连接五点卸料机的输入元件,为使输入输出点 数利用率最大化,将启动按钮、停止按钮、料仓1~5选择按钮和5个磁簧传感器信号接入4
×
3 二极管隔离模块200,其中启动信号和停止信号是互斥信号,而不同的磁簧传感器信号会出 现同时为高电平的状态,此时4
×
3二极管隔离模块200可以消除不同传感器信号之间的信号 串扰,提高系统的稳定性;继电器模块400采用sj1s-05b型机械式继电器,它的驱动能力和 使用寿命更高,将继电器的触点接入负载,而继电器的线圈一端接入xyj-krdzk-32mt集 成控制模块100的输出端y4~y7、y
10
和y
11
,其中输出端y4~y6一侧的继电器线圈接入24v,y7、 y
10
、y
11
一侧的继电器线圈接入0v;以输出端y4和y7导通为例,电流方向为y4→
继电器线圈
ꢀ→
继电器触点
→
负载
→
二极管
→
继电器触点
→
继电器线圈
→
y7;输出负载模块500连接五点 卸料机的输出负载,为使输出点数利用率最大化,将启动灯、停止灯、料仓灯1~5接入3
×
3 二极管隔离模块600,其中启动灯和停止灯是互斥信号,料仓灯1~5也是存在两个灯同时为高 电平的情况,此时4
×
3二极管隔离模块200可以消除不同输出点之间的信号串扰,同时,可 以让多路信号同时输出高电平,使得该装置具有更广阔的应用场景;3
×
3二极管隔离模块600 可以选用整流二极管或肖特基二极管,二极管的负极接入,输出端y7、y
10
、y
11
,正极接入负 载。
[0041]
为使本发明的扩展方法具有更好的推广性,表2给出了不同控制器针对1-13点卸料机的矩 阵输入输出扩展方式,所选控制器型号为xyj-krdzk-32mt(16点输入,16点输出), xyj-krdzk-56mt(32点输入,24点输出);
[0042]
表2不同控制器对不同类型卸料机的输入输出拓展
[0043]
[0044][0045]
上述实施例只为说明本发明的技术构思及特点,其目的在于使本领域技术人员能够了解 本发明的内容并据以实施,并不能以此限制本发明的保护范围。
[0046]
本发明未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1