一种定日镜方位零点现场标定系统及方法与流程
1.本发明属于太阳能光热发电领域,具体涉及一种定日镜方位零点现场标定系统及方法。
背景技术:
2.塔式太阳能光热发电技术中依靠定日镜将太阳光反射至目标吸热区域。太阳相对于定日镜一直处于运动状态,所以定日镜需要实时精确调整姿态以保证太阳光反射的准确性。现有塔式太阳能光热发电站的镜场规模都较大,外围定日镜距离吸热区域的距离较远,需要定日镜具有较高的转动精度以保证光热发电站的工作效率。虽然定日镜可以由多种方式实现转动,但其俯仰零点和方位零点是定日镜转动模型的基础,即俯仰零点和方位零点的正确性能够有效保证定日镜高精度转动,也能提高定日镜的开通调试效率。
3.俯仰零点与水平面相关,可以通过倾角仪、水平尺等仪器进行精确标定。方位零点与坐标系、地理方位等因素相关,常规的标定方法包括指南针法、全站仪法等。指南针法通过地磁感应进行方位标记,从而获得定日镜的方位零点。指南针法容易受到磁场干扰、地磁偏角等环境因素影响,难以实现高精度的标定。全站仪法是指在已知坐标的点位上架设全站仪,基于几何关系直接通过全站仪在目标定日镜上标记方位零点位置。该方法效率较低,一个点位只能覆盖小范围的定日镜,需要通过不断移动全站仪覆盖整个镜场的定日镜标定。复杂的几何换算关系也增加操作的复杂性,并会引入计算误差。因此,需要实现一种高效的定日镜方位零点现场标定系统。
技术实现要素:
4.本发明针对塔式太阳能光热发电技术中定日镜方位零点精度要求高的特点,利用待测定日镜与固定标志物间的空间坐标关系,实现一种高效的定日镜方位零点现场标定系统。
5.一种定日镜方位零点现场标定系统,包括转动机构、瞄准器、标定器和固定标志物;所述标定器固定在转动机构上,用于指示定日镜方位零点位置;所述转动机构上设有角度刻度标识;所述瞄准器对准固定标志物。
6.本发明还公开了一种定日镜方位零点现场标定方法,包括如下步骤:
7.1)以镜场中心为原点建立镜场坐标系,其中x轴指向正南方向,y轴指向正东方向,z轴竖直指向天空;
8.2)通过测绘方法获得所有待测定日镜中心坐标haxn=[hx,hy,hz]n和固定标志物4的中心坐标taxm=[tx,ty,tz]m,其中n表示待测定日镜编号,[hx,hy,hz]n分别表示n号待测定日镜中心在镜场坐标系x轴、y轴和z轴的分量,m表示固定标志物编号,[tx,ty,tz]m分别表示m号固定标志物中心在镜场坐标系x轴、y轴和z轴的分量;
[0009]
3)计算n号待测定日镜指向m号固定标志物的矢量:
[0010]
其中| |表示取模运算;
[0011]
4)计算n号待测定日镜的补偿角,
[0012]
a)如果以正北方向为方位零点,则补偿角:
[0013][0014]
式中:sign()表示取正负号运算,当括号内的值》0时值为1,当括号内的值=0时值为0,当括号内的值《0时值为-1,arctan()表示反正切运算;
[0015]
b)如果以正南方向为方位零点,则补偿角式中arctan()表示反正切运算;
[0016]
5)根据补偿角通过转动机构调整标定器与瞄准器间的夹角,然后固定转动机构和标定器,使得夹角关系固定,补偿角的正负号关系满足右手坐标系规则:
[0017]
a)当补偿角值》0时,标定器转动至瞄准器右侧;
[0018]
b)当补偿角值=0时,标定器转动至与瞄准器重合;
[0019]
c)当补偿角值《0时,标定器转动至瞄准器左侧;
[0020]
6)将方位零点现场标定系统安装至待测定日镜立柱上,然后以转动定日镜立柱或现场标定系统绕定日镜立柱轴线转动的方式调整瞄准器,使得瞄准器中心对准固定标志物中心;
[0021]
7)根据该状态下标定器相对于定日镜的位置,标定待测定日镜的方位零点;
[0022]
8)重复步骤3)-7),标定所有待测定日镜的方位零点。
[0023]
本发明的有益效果:
[0024]
(1)本发明不易受磁场干扰、地磁偏角等环境影响,标定的稳定性好;
[0025]
(2)本发明基于待测定日镜与固定标志物之间的空间坐标关系实现方位零点标定,标定精度高,不需要进行复杂的几何换算关系,不易引入计算误差;
[0026]
(3)本发明操作简单,标定效率高,直接利用待测定日镜和固定标志物实现方位零点标定,并且固定标志物能够覆盖大范围的定日镜。
附图说明
[0027]
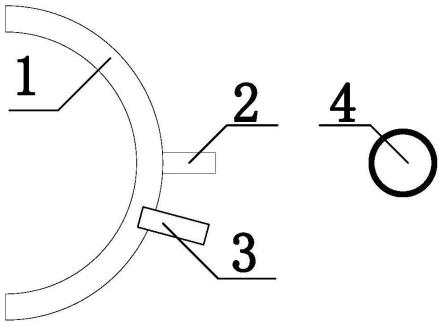
图1是本发明现场标定系统的示意图;
[0028]
图2为补偿角示意图。
具体实施方式
[0029]
以下结合附图和具体实施例对本发明作进一步说明。
[0030]
实施例1
[0031]
如图1所示,一种定日镜方位零点现场标定系统,包括转动机构1、瞄准器2、标定器3和固定标志物4。所述标定器3固定在转动机构1上,用于指示定日镜方位零点位置;所述转
动机构1上设有角度刻度标识;所述瞄准器2对准固定标志物4。
[0032]
所述转动机构1带动标定器3相对于瞄准器2转动,通过转动机构1上的角度刻度标识实现瞄准器2和标定器3间夹角的精确调节。转动机构1可以是圆形导轨或绕轴转动机构。
[0033]
所述瞄准器2用于对准固定标志物4,瞄准器2与转动机构1的位置相对固定,不随转动机构1转动而转动。瞄准器2可以是人眼瞄准机构或图像采集系统,人眼瞄准机构包括带刻度的望远镜或机械准星等,图像采集系统由成像光路(透镜或小孔等)、数字图像传感器和显示屏组成。
[0034]
所述固定标志物4可以是定日镜立柱、天线、高塔等空间位置相对固定的物体。
[0035]
实施例2
[0036]
一种定日镜方位零点现场标定方法,包括如下步骤:
[0037]
1)以镜场中心为原点建立镜场坐标系,其中x轴指向正南方向,y轴指向正东方向,z轴竖直指向天空;
[0038]
2)通过测绘方法获得所有待测定日镜中心坐标haxn=[hx,hy,hz]n和固定标志物4的中心坐标taxm=[tx,ty,tz]m,其中n表示待测定日镜编号,[hx,hy,hz]n分别表示n号待测定日镜中心在镜场坐标系x轴、y轴和z轴的分量,m表示固定标志物编号,[tx,ty,tz]m分别表示m号固定标志物中心在镜场坐标系x轴、y轴和z轴的分量;
[0039]
3)计算n号待测定日镜指向m号固定标志物的矢量:
[0040]
其中| |表示取模运算;
[0041]
4)计算n号待测定日镜的补偿角,
[0042]
a)如果以正北方向为方位零点,则补偿角
[0043]
式中sign()表示取正负号运算,当括号内的值》0时值为1,当括号内的值=0时值为0,当括号内的值《0时值为-1,arctan()表示反正切运算;
[0044]
b)如果以正南方向为方位零点,则补偿角式中arctan()表示反正切运算;
[0045]
5)根据补偿角通过转动机构1调整标定器3与瞄准器2间的夹角,然后固定转动机构1和标定器3,使得夹角关系固定,补偿角的正负号关系满足右手坐标系规则,如图2所示,
[0046]
a)当补偿角值》0时,标定器转动至瞄准器右侧;
[0047]
b)当补偿角值=0时,标定器转动至与瞄准器重合;
[0048]
c)当补偿角值《0时,标定器转动至瞄准器左侧;
[0049]
6)将方位零点现场标定系统安装至待测定日镜立柱上,然后以转动定日镜立柱或现场标定系统绕定日镜立柱轴线转动的方式调整瞄准器2,使得瞄准器中心对准固定标志物4中心;
[0050]
7)根据该状态下标定器3相对于定日镜的位置,标定待测定日镜的方位零点;
[0051]
8)重复步骤3)-7),标定所有待测定日镜的方位零点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1