一种室内移动机器人的多传感器系统的制作方法
1.本发明涉及控制系统技术领域,尤其涉及一种室内移动机器人的多传感器系统。
背景技术:
2.移动机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。目前的移动机器人系统存在着运算能力低下和可扩展行低的问题,从而导致移动机器人系统的功耗增大,进而降低了用户体验感。
技术实现要素:
3.鉴以此,本发明的目的在于提供一种室内移动机器人的多传感器系统,以至少解决以上问题。
4.本发明采用的技术方案如下:
5.一种室内移动机器人的多传感器系统,包括移动机器人,其特征在于,所述系统应用在移动机器人上,所述系统包括通过can总线连接的上层控制部和下层控制部,所述上层控制部通过双核处理器和嵌入式构架实现,并且设有多传感器连接端口、can总线连接端口和人机接口,所述下层控制部包括语音传感器、视觉传感器、超声传感器、红外传感器、接近传感器、光电码盘、移动机构、下层定点运动dsp单元、下层漫游dsp单元、下层避障dsp单元和下层定位及伺服dsp单元,所述超声传感器、红外传感器和接近传感器分别与下层定点运动dsp单元、下层漫游dsp单元以及下层避障dsp单元进行串联连接,所述光电码盘和移动机构与下层定位及伺服dsp单元进行并联连接,所述下层定点运动dsp单元、下层漫游dsp单元、下层避障dsp单元和下层定位及伺服dsp单元分别配置一个can总线连接端口。
6.进一步的,所述双核处理器包括dsp内核和arm内核,所述arm内核的一端与dsp内核相连,另一端分别与人机接口,所述dsp内核的另外一端和can总线连接端口相连接。
7.进一步的,所述语音传感器和视觉传感器分别与dsp内核相连接,并且用于采集移动机器人环境的语音和视觉信息。
8.进一步的,所述超声传感器与下层定点运动dsp单元相连,用于采集移动机器人环境的超声信息,并传输给下层定点运动dsp单元,所述红外传感器与下层漫游dsp单元相连,用于采集机器人环境的红外信息,并传输给下层漫游dsp单元,所述接近传感器与下层避障dsp单元相连,用于采集机器人与周围物体的距离信息,并传输给下层避障dsp单元,所述光电码盘与下层定位及伺服dsp单元相连,用于确定机器人运动的角位移信息,并传输给下层定位及伺服dsp单元,所述移动机构与下层定位及伺服dsp单元相连,用于根据下层定位与伺服dsp单元的控制命令实现移动机器人的具体运动。
9.进一步的,包括路径规划模块,所述路径规划模块通过下层定点运动dsp单元与超声传感器和can总线相连,下层定点运动dsp单元将超声传感器接收到的超声信息,通过can
总线从下层漫游dsp单元接收红外信息、从下层避障dsp单元接收与环境中障碍物的距离信息,并且对超声、红外、距离信息进行数据融合,结合上层控制部给出的移动机器人位置和目标点信息,规划出自由路径。
10.进一步的,路径规划模块将规划的自由路径通过can总线发送给下层定位及伺服dsp单元,用于实现移动机器人的定点运动;下层漫游dsp单元与红外传感器和can总线相连,下层漫游dsp单元将红外传感器接收红外信息,通过can总线从下层避障dsp单元接收与环境中障碍物的距离信息,通过规划的自由路径,实现机器人的漫游行为,漫游动作命令通过can总线发送给下层定位及伺服dsp单元,红外信息通过can总线发送给下层定点运动dsp单元。
11.进一步的,下层避障dsp单元与接近传感器和can总线相连,下层避障dsp单元将接近传感器接收与环境中障碍物的距离信息,通过动态避障算法实现移动机器人的动态避障,避障动作命令通过can总线发送给下层定位及伺服dsp单元,并且环境中障碍物的距离信息通过can总线发送给下层定点运动dsp单元和下层漫游dsp单元。
12.进一步的的,包括定位模块,所述定位模块通过下层定位及伺服dsp单元与光电码盘和can总线相连,并且将光电码盘接收移动机器人的角位移信息以实现粗定位,并根据通过can总线接收到的移动机器人设置的位置传感器信息实现精确定位。
13.与现有技术相比,本发明的有益效果是:
14.本发明提出的一种室内移动机器人的多传感器系统,为了提高移动机器人的运算处理能力,可以采用嵌入式架构来实现机器人控制,嵌入式架构适用于对功能、可靠性、成本、体积、功耗有严格要求的系统,并且对移动机器人的各个单元采用定制的嵌入式架构来实现,可以针对不同单元的特点定制最合适的软硬件实现;各个单元以分布式的结构实现并行处理,通过高速通信网络实现局部控制网络,从而可以极大地提高系统的运算能力,其灵活的结构使得机器人系统的成本和功耗都很容易控制;采用定制的嵌入式构架和高性能专用双核处理器构建上层控制部,采用多个dsp单元组成底层控制部,各单元可以实现并行处理,并通过高速可靠的can总线实现网络通信,系统具备高速数据处理能力和实时数据通信能力,实现同时减小了移动机器人平台的体积,降低了系统的功耗和成本,提高了移动机器人系统的可扩展性,有利于拓展移动机器人的应用。
附图说明
15.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
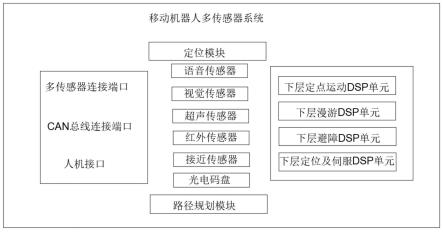
16.图1是本发明实施例提供的一种室内移动机器人的多传感器系统整体电路连接示意图。
具体实施方式
17.以下结合附图对本发明的原理和特征进行描述,所列举实施例只用于解释本发明,并非用于限定本发明的范围。
18.参照图1,本发明提供一种室内移动机器人的多传感器系统,包括移动机器人,其特征在于,所述系统应用在移动机器人上,所述系统包括通过can总线连接的上层控制部和下层控制部,所述上层控制部通过双核处理器和嵌入式构架实现,并且设有多传感器连接端口、can总线连接端口和人机接口,所述下层控制部包括语音传感器、视觉传感器、超声传感器、红外传感器、接近传感器、光电码盘、移动机构、下层定点运动dsp单元、下层漫游dsp单元、下层避障dsp单元和下层定位及伺服dsp单元,所述超声传感器、红外传感器和接近传感器分别与下层定点运动dsp单元、下层漫游dsp单元以及下层避障dsp单元进行串联连接,所述光电码盘和移动机构与下层定位及伺服dsp单元进行并联连接,所述下层定点运动dsp单元、下层漫游dsp单元、下层避障dsp单元和下层定位及伺服dsp单元分别配置一个can总线连接端口。
19.所述双核处理器包括dsp内核和arm内核,所述arm内核的一端与dsp内核相连,另一端分别与人机接口,所述dsp内核的另外一端和can总线连接端口相连接。
20.所述语音传感器和视觉传感器分别与dsp内核相连接,并且用于采集移动机器人环境的语音和视觉信息。
21.所述超声传感器与下层定点运动dsp单元相连,用于采集移动机器人环境的超声信息,并传输给下层定点运动dsp单元,所述红外传感器与下层漫游dsp单元相连,用于采集机器人环境的红外信息,并传输给下层漫游dsp单元,所述接近传感器与下层避障dsp单元相连,用于采集机器人与周围物体的距离信息,并传输给下层避障dsp单元,所述光电码盘与下层定位及伺服dsp单元相连,用于确定机器人运动的角位移信息,并传输给下层定位及伺服dsp单元,所述移动机构与下层定位及伺服dsp单元相连,用于根据下层定位与伺服dsp单元的控制命令实现移动机器人的具体运动。
22.本实施例包括路径规划模块,所述路径规划模块通过下层定点运动dsp单元与超声传感器和can总线相连,下层定点运动dsp单元将超声传感器接收到的超声信息,通过can总线从下层漫游dsp单元接收红外信息、从下层避障dsp单元接收与环境中障碍物的距离信息,并且对超声、红外、距离信息进行数据融合,结合上层控制部给出的移动机器人位置和目标点信息,规划出自由路径。
23.本实施例路径规划模块将规划的自由路径通过can总线发送给下层定位及伺服dsp单元,用于实现移动机器人的定点运动;下层漫游dsp单元与红外传感器和can总线相连,下层漫游dsp单元将红外传感器接收红外信息,通过can总线从下层避障dsp单元接收与环境中障碍物的距离信息,通过规划的自由路径,实现机器人的漫游行为,漫游动作命令通过can总线发送给下层定位及伺服dsp单元,红外信息通过can总线发送给下层定点运动dsp单元。
24.具体的,下层避障dsp单元与接近传感器和can总线相连,下层避障dsp单元将接近传感器接收与环境中障碍物的距离信息,通过动态避障算法实现移动机器人的动态避障,避障动作命令通过can总线发送给下层定位及伺服dsp单元,并且环境中障碍物的距离信息通过can总线发送给下层定点运动dsp单元和下层漫游dsp单元。
25.本实施例包括定位模块,所述定位模块通过下层定位及伺服dsp单元与光电码盘和can总线相连,并且将光电码盘接收移动机器人的角位移信息以实现粗定位,并根据通过can总线接收到的移动机器人设置的位置传感器信息实现精确定位。
26.上述实施例中,所述所述语音传感器、视觉传感器、超声传感器、红外传感器、接近传感器、光电码盘、移动机构、下层定点运动dsp单元、下层漫游dsp单元、下层避障dsp单元和下层定位及伺服dsp单元均可以采用本领域技术人员公知的现有型号;所述上位机为计算机、服务器一类的设备。
27.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1