基于移动机器人的入出库调度系统及其优化调度方法与流程
1.本发明涉及一种基于移动机器人的入出库调度系统及其优化调度方法。
背景技术:
2.移动机器人,例如自动导引车(automated guided vehicle, agv)、自主移动机器人(autonomous mobile robot, amr)、有轨制导车辆(rail guided vehicle, rgv)、物流配送机器人等,广泛应用于日常生产生活、工业生产场所、或者商用场合(例如大型超市、银行金库、物流配送等)中,实现物料及物料容器(托盘、仓储笼、周转箱、物流台车等)的自动入出库操作,当生产设备对应工位有物料容器下线时由作业调度系统调度移动机器人进行入库类型作业,将工位的物料容器入库配送到库区中,入库完成后进行库存记账,当生产设备对应工位有物料容器需求时,由作业调度系统匹配库存物料,调度移动机器人进行出库类型作业,将库区中的物料容器出库配送到需要物料容器的生产工位。
3.但当车间内生产设备的工位有待入库的物料容器,而恰好此时库存中存在与待入库的物料容器相同并待出库的物料容器,一般需由移动机器人对工位的物料容器执行入库类型作业,并由其他移动机器人对仓库的物料容器执行出库类型作业,作业单一复合作业成功率低,因而造成配送效率较低,且为了满足作业的要求需增多移动机器人的配备数量。
技术实现要素:
4.为了克服现有技术的不足,本发明的目的之一在于提供基于移动机器人的入出库调度系统,其可提高配送效率,并可减少移动机器人的配备数量。
5.本发明的目的之二在于提供优化调度方法,其运用于上述的基于移动机器人的入出库调度系统,通过其可实现配送效率的提高,并可减少移动机器人的配备数量。
6.本发明的目的之一采用以下技术方案实现:一种基于移动机器人的入出库调度系统,包括:作业调度子系统,用于生成调度作业,并向管理监控子系统发送调度作业信息;其中,所述调度作业信息包括作业类型、运送对象属性信息、起始位置和目标位置;所述作业类型分为出库类型、入库类型、直接配送类型;管理监控子系统,配置为与作业调度子系统通过以太网通信连接并与移动机器人无线通信连接,用于依据作业调度子系统发送的调度作业信息调度移动机器人执行调度作业,以通过移动机器人将运送对象从调度作业的起始位置运送至目标位置;若作业调度子系统同时存在出库类型作业和入库类型作业,且出库类型作业的运送对象属性与入库类型作业的运送对象属性相同,在出库类型作业未完成取货且入库类型作业未完成卸货的情况下,作业调度子系统用于对该出库类型作业和入库类型作业进行整合,以整合为直接配送类型作业并以直接配送类型作业作为管理监控子系统调度移动机器人的依据,还以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置。
7.该基于移动机器人的入出库调度系统还包括库存管理子系统,配置为与作业调度子系统通信连接,并包括库存管理模块和货位管理模块。
8.本发明的目的之二采用以下技术方案实现:一种优化调度方法,运用于上述的基于移动机器人的入出库调度系统,该优化调度方法包括以下步骤:步骤1:若作业调度子系统中存在入库类型作业和出库类型作业,作业调度子系统获取调度作业信息,检索判定出库类型作业的运送对象的属性与入库类型作业的运送对象的属性是否相同,若相同则执行步骤3,否则执行步骤2;其中,所述调度作业信息包括作业类型、运送对象的属性信息、起始位置和目标位置;所述作业类型分为出库类型、入库类型、直接配送类型;步骤2:管理监控子系统依据作业调度子系统发送的调度作业信息调度移动机器人执行调度作业,以通过移动机器人将运送对象从调度作业的起始位置运送至目标位置;步骤3:作业调度子系统判定出库类型作业和入库类型作业的发送情况,若出库类型作业和入库类型作业均未向管理监控子系统发送则执行步骤4,若出库类型作业已向管理监控子系统发送且入库类型作业未发送则执行步骤5,若入库类型作业已向管理监控子系统发送且出库类型作业未发送则执行步骤6,若出库类型作业和入库类型作业均向管理监控子系统发送则执行步骤7;步骤4:作业调度子系统对该出库类型作业和入库类型作业进行整合,以将出库类型作业和入库类型作业整合为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,作业调度子系统向管理监控子系统发送直接配送类型作业,管理监控子系统依据作业调度子系统发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;步骤5:作业调度子系统获取调度作业信息,判定出库类型作业是否已取货完成,若出库类型作业未取货完成,作业调度子系统对该出库类型作业和入库类型作业进行整合,以将出库类型作业修改为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置,作业调度子系统删除入库类型作业;若出库类型作业已取货完成,作业调度子系统退出判定,发送入库类型作业,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;步骤6:作业调度子系统获取调度作业信息,判定入库类型作业是否已卸货完成,若入库类型作业未卸货完成,作业调度子系统对该出库类型作业和入库类型作业进行整合,以将入库类型作业修改为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置,作业调度子系统删除出库类型作业;若入库类型作业已卸货完成,作业调度子系统退出判定,发送出库类型作业,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;
步骤7:作业调度子系统获取调度作业信息,判定入库类型作业是否已卸货完成和出库类型作业是否已取货完成,若均未完成,作业调度子系统对该出库类型作业和入库类型作业进行整合,以整合为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;若入库类型作业已卸货完成和/或出库类型作业已取货完成,作业调度子系统退出判定,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业。
9.所述步骤4包括以下子步骤:子步骤41a:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤42a:作业调度子系统用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业;子步骤43a:作业调度子系统将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;子步骤44a:作业调度子系统删除入库类型作业,将直接配送类型作业信息发送给管理监控子系统;管理监控子系统依据作业调度子系统发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置。
10.所述步骤4包括以下子步骤:子步骤41b:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤42b:作业调度子系统用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业;子步骤43b:作业调度子系统将入库类型作业的原目标位置的货位状态设置为空货位状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;子步骤44b:作业调度子系统删除出库类型作业,将直接配送类型作业信息发送给管理监控子系统;管理监控子系统依据作业调度子系统发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置。
11.所述步骤5包括以下子步骤:子步骤51:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤52:作业调度子系统判定出库类型作业是否已取货完成,若出库类型作业未取货完成则执行子步骤53,否则作业调度子系统退出判定,发送入库类型作业,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;子步骤53:作业调度子系统用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统发出出库类型作业起始位置更新指令,管理监控子系统依据直接配送类型作业信息调度移动机器人执行
直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统删除入库类型作业。
12.所述子步骤53包括以下子步骤:子步骤531:作业调度子系统用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统发出出库类型作业起始位置更新指令,管理监控子系统依据直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;子步骤532:作业调度子系统将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;子步骤533:作业调度子系统删除入库类型作业。
13.所述步骤6包括以下子步骤:子步骤61:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤62:作业调度子系统判定入库类型作业是否已卸货完成,若入库类型作业未卸货完成则执行子步骤63,否则作业调度子系统退出判定,发送出库类型作业,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;子步骤63:作业调度子系统用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业,并向管理监控子系统发送入库类型作业目标位置更新指令,管理监控子系统依据直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统将入库类型作业的原目标位置的货位状态设置为空货位状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;作业调度子系统删除出库类型作业。
14.所述步骤7包括以下子步骤:子步骤71a:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤72a:作业调度子系统判定入库类型作业是否已卸货完成和者出库类型作业是否已取货完成,若均未完成,则执行以下子步骤73a,否则,作业调度子系统退出判定,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;子步骤73a:作业调度子系统用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业,并向管理监控子系统发送入库类型作业目标位置更新指令和取消出库类型作业指令;子步骤74a:判定入库类型作业目标位置更新指令和取消出库类型作业指令是否成功,如不成功则继续执行子步骤74a,否则执行下一子步骤75a;子步骤75a:管理监控子系统依据更新后的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统将入库类型作业的原目标位置的货位状态设置为空货位
状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;作业调度子系统删除出库类型作业。
15.所述步骤7包括以下子步骤:子步骤71b:作业调度子系统获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤72b:作业调度子系统判定入库类型作业是否已卸货完成和者出库类型作业是否已取货完成,若均未完成,则执行以下子步骤73b,否则,作业调度子系统退出判定,管理监控子系统依据作业调度子系统发送的调度作业信息继续调度移动机器人执行调度作业;子步骤73b:作业调度子系统用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统发送出库类型作业起始位置更新指令和取消入库类型作业指令;子步骤74b:判定出库类型作业起始位置更新指令和取消入库类型作业是否成功,如不成功则继续执行子步骤74b,否则执行下一子步骤75b;子步骤75b:管理监控子系统依据更新后的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;作业调度子系统删除入库类型作业。
16.相比现有技术,本发明的有益效果在于:本发明提供的一种基于移动机器人的入出库调度系统及其优化调度方法,在作业调度子系统中同时存在出库类型作业和入库类型作业,且出库类型作业的运送对象与入库类型作业的运送对象相同时,在出库类型作业未完成取货且入库类型作业未完成卸货的情况下,可通过作业调度子系统对该出库类型作业和入库类型作业进行整合,以整合为直接配送类型作业,还以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,并根据直接配送类型作业信息调度移动机器人执行直接配送类型作业,使移动机器人可直接将运送对象从入库类型作业的起始位置运送至出库类型作业的目标位置,从而通过作业整合,可对作业起到精简化作用,减少移动机器人的移动路径,提升了现场移动机器人的调度水平和配送效率;同时在相同作业量的情况下可帮助最终用户减少购买移动机器人的配置数量,从而节约大量的经济成本。
附图说明
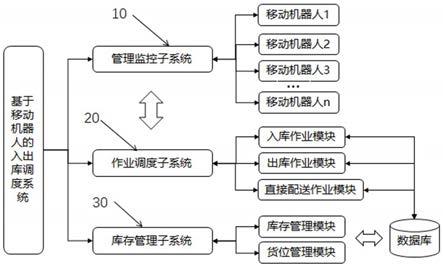
17.图1是本发明的基于移动机器人的入出库调度系统功能实现图;图2是本发明移动机器人执行入库作业调度实现流程图;图3是本发明移动机器人执行出库作业调度实现流程图;图4是本发明入出库作业均未下发情况下调度流程图;图5是本发明入库作业未下发、出库作业已下发情况下调度流程图;图6是本发明入库作业已下发、出库作业未下发情况下调度流程图;
图7是本发明入出库作业均已下发情况下调度流程图。
18.其中,10、管理监控子系统;20、作业调度子系统;30、库存管理子系统。
具体实施方式
19.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
20.如图1所示,本发明还公开了一种基于移动机器人的入出库调度系统,包括:作业调度子系统20,用于生成调度作业,并向管理监控子系统10发送调度作业信息;其中,所述调度作业信息包括作业类型、运送对象属性信息、起始位置和目标位置;所述作业类型分为出库类型、入库类型、直接配送类型;管理监控子系统10,配置为与作业调度子系统20通过以太网通信连接并与移动机器人无线通信连接,用于依据作业调度子系统20发送的调度作业信息调度移动机器人执行调度作业,以通过移动机器人将运送对象从调度作业的起始位置运送至目标位置;若作业调度子系统20同时存在出库类型作业和入库类型作业,且出库类型作业的运送对象属性与入库类型作业的运送对象属性相同,在出库类型作业未完成取货且入库类型作业未完成卸货的情况下,作业调度子系统20用于对该出库类型作业和入库类型作业进行整合,以整合为直接配送类型作业并以直接配送类型作业作为管理监控子系统10调度移动机器人的依据,还以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置。其中,出库类型作业的运送对象属性与入库类型作业的运送对象属性相同,即为两者的运送对象为类别、结构、材质、形状各性质均相同的物料容器。
21.具体的,在实际使用时,若发送的调度作业为入库类型作业,运送对象为物料容器,起始位置为三号工位,目标位置为四号货架,则管理监控子系统10根据发送的入库类型作业信息调度移动机器人执行入库类型作业,以通过移动机器人将物料容器从三号工位运送至四号货架。若发送的调度作业为出库类型作业,运送对象为物料容器,起始位置为五号货架,目标位置为二号工位,则管理监控子系统10根据发送的出库类型作业信息调度移动机器人执行出库类型作业,通过移动机器人将物料容器从五号货架运送至二号工位。若生成的调度作业中同时存在上述的出库类型作业和入库类型作业,且出库类型作业的运送对象与入库类型作业的运送对象相同(两者的运送对象为物料容器),在出库类型作业未完成取货且入库类型作业未完成卸货的情况下,通过作业调度子系统20对该出库类型作业和入库类型作业进行整合,将发送的调度作业整改为直接配送类型作业,以该三号工位作为直接配送类型作业的起始位置,以二号工位作为直接配送类型作业的目标位置,并根据发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,通过移动机器人直接将物料容器从三号工位直接运送至二号工位,从而通过作业整合,可对作业起到精简化作用,而无需移动机器人将物料容器从三号工位入库到四号货架,将物料容器从五号货架运送至二号工位,减少移动机器人的移动路径,提升了现场移动机器人的调度水平和配送效率;同时在相同作业量的情况下可帮助最终用户减少购买移动机器人的配置数量,从而节约大量的经济成本。
22.该入出库调度系统还包括库存管理子系统30,配置为与作业调度子系统20通信连接,并包括库存管理模块和货位管理模块,用于查询统计库存明细、货位明细。具体的,作业调度子系统20,配置为入库类型作业模块、出库类型作业模块和直接配送类型作业模块,所述入库类型作业模块、出库类型作业模块和直接配送类型作业模块为与库存管理子系统30通过数据库进行通信连接,用于优化入出库类型作业流程。
23.在生成的调度作业为入库类型作业时,所述作业调度子系统20用于根据以下步骤生成调度作业,并向管理监控子系统10发送调度作业信息:步骤c1:生产设备工位有运送对象下线,作业调度子系统20获取生产设备工位号、从数据库中获取距离最近的空货位,产生入库类型作业,入库类型作业产生成功后将空货位设置为工作货位;步骤c2:作业调度子系统20根据作业产生时间、优先级、最近距离等条件,将入库作业包含的作业代号、起始位置、目标位置、优先级下发给管理监控子系统10;而当管理监控子系统10调度最合适的移动机器人去执行入库类型作业,并待移动机器人完成入库类型作业后,作业调度子系统20将货位状态由工作货位状态设置为有货货位状态,并进行库存记账处理;在生成的调度作业为出库类型作业时,所述作业调度子系统20用于根据以下步骤生成调度作业,并向管理监控子系统10发送调度作业信息:步骤d1:生产设备工位需要运送对象,作业调度子系统20从库存管理模块和货位管理模块中根据匹配的物料属性、距离等条件获取对应货位号,产生出库类型作业,出库类型作业产生成功后将货位状态由有货货位设置为工作货位;步骤d2:作业调度子系统20根据作业产生时间、优先级、最近距离等条件,将出库作业的作业代号、起始位置、目标位置、优先级下发给管理监控子系统10;而待管理监控子系统10调度最合适的移动机器人去执行出库类型作业,并完成取货后,作业调度子系统将货位状态由工作货位状态设置为空货位状态,并调度移动机器人继续将物料容器搬运至对应的生产设备工位。
24.如图2-7所示,本发明还公开了一种优化调度方法,运用于上述的基于移动机器人的入出库调度系统;该优化调度方法包括以下步骤:步骤1:若作业调度子系统20中存在入库类型作业和出库类型作业,作业调度子系统20获取调度作业信息,检索判定出库类型作业的运送对象的属性与入库类型作业的运送对象的属性是否相同,若相同则执行步骤3,否则执行步骤2;其中,所述调度作业信息包括作业类型、运送对象的属性信息、起始位置和目标位置;所述作业类型分为出库类型、入库类型、直接配送类型;步骤2:管理监控子系统10依据作业调度子系统20发送的调度作业信息调度移动机器人执行调度作业,以通过移动机器人将运送对象从调度作业的起始位置运送至目标位置; 例如,在该出库类型作业和入库类型作业信息均发送至管理监控子系统10依据作业调度子系统20发送的调度作业信息调度移动机器人分别执行出库类型作业、入库类型作业。
25.步骤3:作业调度子系统20判定出库类型作业和入库类型作业的发送情况,若出库类型作业和入库类型作业均未向管理监控子系统10发送则执行步骤4,若出库类型作业已向管理监控子系统10发送且入库类型作业未发送则执行步骤5,若入库类型作业已向管理
监控子系统10发送且出库类型作业未发送则执行步骤6,若出库类型作业和入库类型作业均向管理监控子系统10发送则执行步骤7;步骤4:作业调度子系统20对该出库类型作业和入库类型作业进行整合,以将出库类型作业和入库类型作业整合为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,作业调度子系统20向管理监控子系统10发送直接配送类型作业,管理监控子系统10依据作业调度子系统20发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;步骤5:作业调度子系统20获取调度作业信息,判定出库类型作业是否已取货完成,若出库类型作业未取货完成,作业调度子系统20对该出库类型作业和入库类型作业进行整合,以将出库类型作业修改为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统10调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置,作业调度子系统20删除入库类型作业;若出库类型作业已取货完成,作业调度子系统20退出判定,发送入库类型作业,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;步骤6:作业调度子系统20获取调度作业信息,判定入库类型作业是否已卸货完成,若入库类型作业未卸货完成,作业调度子系统20对该出库类型作业和入库类型作业进行整合,以将入库类型作业修改为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统10调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置,作业调度子系统20删除出库类型作业;若入库类型作业已卸货完成,作业调度子系统20退出判定,发送出库类型作业,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;步骤7:作业调度子系统20获取调度作业信息,判定入库类型作业是否已卸货完成或者出库类型作业是否已取货完成,若均未完成,作业调度子系统20对该出库类型作业和入库类型作业进行整合,以整合为直接配送类型作业,并以该入库类型作业的起始位置作为直接配送类型作业的起始位置,以该出库类型作业的目标位置作为直接配送类型作业的目标位置,管理监控子系统10调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;若入库类型作业已卸货完成和/或出库类型作业已取货完成,作业调度子系统20退出判定,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业。
26.而通过将该优化调度方法采用步骤1-7,可通过作业整合,可对作业起到精简化作用,减少移动机器人的移动路径,提升了现场移动机器人的调度水平和配送效率;同时在相同作业量的情况下可帮助最终用户减少购买移动机器人的配置数量的同时,而且,通过步骤3-7,以依据作业发送情况进行分类调度,从而可确保调度严谨性。
27.优选的,所述步骤4包括以下子步骤:
子步骤41a:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤42a:作业调度子系统20用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业;子步骤43a:作业调度子系统20将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;子步骤44a:作业调度子系统20删除入库类型作业,将直接配送类型作业信息发送给管理监控子系统10;管理监控子系统10依据作业调度子系统20发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置。
28.当然,除此之外,所述步骤4还可通过以下子步骤实现:子步骤41b:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤42b:作业调度子系统20用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业;子步骤43b:作业调度子系统20将入库类型作业的原目标位置的货位状态设置为空货位状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;子步骤44b:作业调度子系统20删除出库类型作业,将直接配送类型作业信息发送给管理监控子系统10;管理监控子系统10依据作业调度子系统20发送的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置。
29.所述步骤5包括以下子步骤:子步骤51:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤52:作业调度子系统20判定出库类型作业是否已取货完成,若出库类型作业未取货完成则执行子步骤53,否则作业调度子系统20退出判定,发送入库类型作业,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;子步骤53:作业调度子系统20用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统10发出出库类型作业起始位置更新指令,管理监控子系统10依据直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统20删除入库类型作业。
30.所述子步骤53包括以下子步骤:子步骤531:作业调度子系统20用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统10发出出库类型作业起始位置更新指令,管理监控子系统10依据直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;
子步骤532:作业调度子系统20将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;子步骤533:作业调度子系统20删除入库类型作业。
31.所述步骤6包括以下子步骤:子步骤61:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤62:作业调度子系统20判定入库类型作业是否已卸货完成,若入库类型作业未卸货完成则执行子步骤63,否则作业调度子系统20退出判定,发送出库类型作业,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;子步骤63:作业调度子系统20用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业,并向管理监控子系统10发送入库类型作业目标位置更新指令,管理监控子系统10依据直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统20将入库类型作业的原目标位置的货位状态恢复为空货位状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;作业调度子系统20删除出库类型作业。
32.所述步骤7包括以下子步骤:子步骤71a:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤72a:作业调度子系统20判定入库类型作业是否已卸货完成或者出库类型作业是否已取货完成,若两者均未完成且入库类型作业已取货完成,则执行以下子步骤73a,否则,作业调度子系统20退出判定,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;子步骤73a:作业调度子系统20用出库类型作业的目标位置更新为入库类型作业的新目标位置,将入库类型作业修改为直接配送类型作业,并向管理监控子系统10发送入库类型作业目标位置更新指令和取消出库类型作业指令;子步骤74a:判定入库类型作业目标位置更新指令和取消出库类型作业指令是否成功,如不成功则继续执行子步骤74a,否则执行下一子步骤75a;子步骤75a:管理监控子系统10依据更新后的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统20将入库类型作业的原目标位置的货位状态设置为空货位状态,将出库类型作业的起始位置的货位状态设置为有货货位状态;作业调度子系统20删除出库类型作业。
33.当然,除此之外,所述步骤7还可通过以下子步骤实现:子步骤71b:作业调度子系统20获取入库类型作业的起始位置和目标位置,获取出库类型作业的起始位置和目标位置;子步骤72b:作业调度子系统20判定入库类型作业是否已卸货完成或者出库类型作业是否已取货完成,若两者均未完成且入库类型作业未取货完成,则执行以下子步骤
73b,否则,作业调度子系统20退出判定,管理监控子系统10依据作业调度子系统20发送的调度作业信息继续调度移动机器人执行调度作业;子步骤73b:作业调度子系统20用用入库类型作业的起始位置更新为出库类型作业的新起始位置,将出库类型作业修改为直接配送类型作业,并向管理监控子系统10发送出库类型作业起始位置更新指令和取消入库类型作业指令;子步骤74b:判定出库类型作业起始位置更新指令和取消入库类型作业是否成功,如不成功则继续执行子步骤74b,否则执行下一子步骤75b;子步骤75b:管理监控子系统10依据更新后的直接配送类型作业信息调度移动机器人执行直接配送类型作业,以通过移动机器人将运送对象从直接配送类型作业的起始位置运送至目标位置;作业调度子系统20将入库类型作业的目标位置的货位状态设置为空货位状态,将出库类型作业的原起始位置的货位状态设置为有货货位状态;作业调度子系统20删除入库类型作业。
34.而通过将步骤4、5、6、7采用以上的子步骤,可方便于整合。
35.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1