非线性扰动下无拖曳动力学协调条件确定方法及控制方法与流程
1.本发明涉及一种非线性扰动下无拖曳动力学协调条件确定方法及控制方法,属于卫星无拖曳控制技术领域。
背景技术:
2.无拖曳控制技术是重力场测量卫星、引力波探测卫星及等效原理检验卫星控制技术领域的关键技术。按控制目标的不同,无拖曳控制区分为加速度模式无拖曳控制与位移模式无拖曳控制两类。
3.位移模式无拖曳控制要求通过推力连续可调的推力器,将星上惯性传感器中的检验质量控制在其电极笼内标称位置附近很小的变化范围之内。检验质量相对于该标称位置的位移是其受到静电偏压负刚度力与卫星受到大气阻力、太阳光压力及推力器推力共同作用的结果。检验质量的相对位移一般在电极笼内通过机械限位装置被限位于指定的最大正、负位移之间。
4.在某无拖曳试验卫星控制方案研究中发现,在认定负刚度系数为常数的情形下,负刚度系数、机械限位及推力最大值三者之间应当满足指定的关系式,并称之为基本动力学协调条件;若该条件得不到满足,则位移模式无拖曳控制的初始状态必须落在指定的棱形区,并称之为让步动力学协调条件。
5.在此基础上,进一步注意到,一般情形下,惯性传感器中检验质量在静电偏置电压及自引力等作用下所产生的负刚度力加速度总是随检验质量位移非线性变化,且该加速度的零位与电极笼中心一般并不重合。因此,现有的位移模式无拖曳控制动力学协调条件及其导出方法,仍需改进,以便适用于工程中更一般的情形。
技术实现要素:
6.本发明要解决的技术问题是:克服现有技术的不足,解决了在不满足位移模式无拖曳控制系统的基本动力学协调条件确定问题。
7.本发明目的通过以下技术方案予以实现:
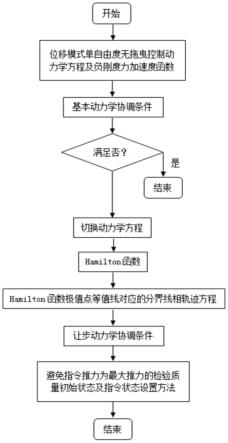
8.一种非线性扰动下无拖曳动力学协调条件确定方法及控制方法,首先,建立位移模式单自由度无拖曳控制动力学方程及负刚度力加速度函数;随后,给出建造位移模式无拖曳控制系统的基本动力学协调条件,即最大推力加速度、正机械限位处的负刚度力加速度、负机械限位处的负刚度力加速度与非保守外干扰力加速度四者之间需要满足一个约束关系式;在不满足基本动力学协调条件的情况下,从位移模式单自由度无拖曳控制动力学方程退化得到一个切换动力学方程;通过建立该切换动力学方程的hamilton函数,导出切换动力学方程的全局动力学分界线相轨迹的解析表达式,形象地给出了无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件;最后,在位移模式单自由度无拖曳控制满足让步动力学协调条件的情况下,给出避免指令推力为最大推力的检验质量初始状态及指令状态设置方法。
9.一种位移模式无拖曳控制让步动力学协调条件确定方法,包括:
10.将位移模式单自由度无拖曳控制动力学方程退化为一个切换动力学方程;
11.通过该切换动力学方程的hamilton函数,获得切换动力学方程的全局动力学分界线相轨迹的解析表达式,即确定无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件。
12.优选的,基于切换动力学方程,通过建立hamilton函数及hamilton函数极值点等值线方程,导出切换动力学方程的全局动力学相轨迹解析表达式,其中包括分界线相轨迹的解析表达式。
13.一种非线性扰动下无拖曳动力学协调条件确定方法,包括:
14.确定位移模式单自由度无拖曳控制动力学方程及负刚度力加速度函数;
15.利用负刚度力加速度函数,确定位移模式无拖曳控制系统的基本动力学协调条件;
16.在不满足位移模式无拖曳控制系统的基本动力学协调条件的情况下,将位移模式单自由度无拖曳控制动力学方程退化为一个切换动力学方程;通过该切换动力学方程的hamilton函数,获得切换动力学方程的全局动力学分界线相轨迹的解析表达式,即确定无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件。
17.优选的,基于切换动力学方程,通过建立hamilton函数及hamilton函数极值点等值线方程,导出切换动力学方程的全局动力学相轨迹解析表达式,其中包括分界线相轨迹的解析表达式。
18.优选的,确定位移模式无拖曳控制系统的基本动力学协调条件具体为:
19.正机械限位处负刚度力加速度绝对值与负机械限位处负刚度力加速度绝对值中较大者,加上非保守外干扰力加速度绝对值最大值之和,小于推力器最大推力除以卫星质量。
20.优选的,确定位移模式无拖曳控制系统的基本动力学协调条件具体为:
21.正机械限位处负刚度力加速度绝对值与负机械限位处负刚度力加速度绝对值中较大者,加上非保守外干扰力加速度绝对值最大值之和,远小于推力器最大推力除以卫星质量。
22.一种位移模式无拖曳控制方法,利用上述确定无拖曳推力器最大推力不足时的位移模式无拖曳控制基本动力学协调条件及让步动力学协调条件,然后确定避免指令推力为最大推力的检验质量初始状态及指令状态设置原则。
23.优选的,位移模式单自由度无拖曳控制系统检验质量初始状态及指令状态应当满足的让步动力学协调条件,对应为切换动力学方程在相平面中所有极限环所占据的区域。
24.优选的,所有极限环所占据的区域即相平面中发散相轨迹与极限环相轨迹的分界线所围成的区域。
25.优选的,发散相轨迹与极限环相轨迹的分界线通过hamilton函数极值点等值线方程求解。
26.优选的,避免指令推力为最大推力的检验质量初始状态及指令状态设置原则为:检验质量初始状态及指令状态应尽量靠近负刚度力零位。
27.本发明相比于现有技术具有如下有益效果:
28.(1)本发明方法给出了不考虑姿态影响的位移模式单自由度无拖曳控制非线性动力学方程;在获得退化切换动力学方程的基础上,建立了负刚度力加速度仅由静电偏压力加速度提供情形下切换动力学方程的hamilton函数的最终解析表达式;确定了无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件,为惯性传感器中检验质量在静电偏置电压及自引力等作用下所产生的负刚度力加速度随检验质量位移非线性变化、加速度的零位与电极笼中心不重合的情形,提供了有效解决技术问题的手段。
29.(2)本发明方法中退化的切换动力学方程考虑了静电负刚度力加速度及推力加速度两类扰动,具有更为广泛的适用性。
30.(3)本发明方法给出了扰动函数为非线性情形下启动位移无拖曳控制时检验质量状态初值应满足的基本动力学协调条件,以及扰动函数为非线性情形下启动位移无拖曳控制时检验质量状态初值应满足的让步动力学协调条件,为实现位移模式无拖曳控制提供了基础。
31.(4)本发明方法给出了扰动函数为非线性情形下避免位移无拖曳控制指令推力为最大推力的检验质量初始状态及指令状态设置原则,能够实现位移模式无拖曳控制,且避免了指令推力为最大推力。
附图说明
32.图1为本发明方法的步骤流程图。
33.图2为卫星及其惯性传感器电极笼内检验质量的受力示意图。
34.图3为考虑静电负刚度力加速度函数非线性情形下位移模式无拖曳系统退化的切换动力学系统的hamilton函数曲面。
35.图4为考虑静电负刚度力加速度函数非线性情形下位移模式无拖曳系统退化的切换动力学系统全局相轨迹示意图。
36.图5为线性与非线性两种情况的分界线相轨迹对比图。
37.图6为在检验质量初始状态与指令状态不同取法情形下位移无拖曳控制系统响应相图。
38.图7为图6对应的指令推力的时间历程局部。
具体实施方式
39.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步详细描述。
40.实施例1:
41.一组非线性扰动下的无拖曳动力学协调条件及控制方法,如图1所示,包括如下步骤:
42.步骤(1)位移模式单自由度无拖曳控制动力学方程及负刚度力加速度函数。
43.不考虑姿态影响,以仅x自由度为位移模式无拖曳控制自由度为例,位移模式单自由度无拖曳控制动力学方程为:
[0044][0045]
式中,x为卫星惯性传感器电极室形心即指定的测量零位到检验质量质心的位移
矢量在卫星本体坐标系x方向的分量,为对应的加速度矢量在卫星本体坐标系x方向的分量,a
ns
(x)为负刚度力加速度函数,ad为大气阻力及太阳光压在x方向的合力加速度,也称为非保守外干扰力加速度,au为卫星在x方向的无拖曳控制推力加速度,即加速度控制量。
[0046]
对引力波探测航天器而言,负刚度力加速度一般由静电偏压力加速度与自引力加速度两部分组成。在这类航天器总体设计较好的情况下,后者远远小于前者。本实施例中,在后者可以忽略情况下,在图2所示系统中,负刚度力加速度函数可写成:
[0047][0048]
式中,d0为检验质量处于平衡位置时与电极腔之间的间隙;c为由介电常数、x自由度两侧电容极板有效面积、施加在检验质量上的直流偏置电压及高频正弦波检测电压等共同决定的一个常数,量纲为m3/s2;x
fns0
为负刚度力加速度为零的位置。
[0049]
容易见到,负刚度力加速度函数是一个单调增函数,x=x
fns0
为该函数的唯一零点,该函数关于该零点反对称。该函数在x
→
x
fns0
+d0或x
→
x
fns0-d0时趋于∞。因此,在工程实际中,检验质量质心的运动范围总是受到机械限位
±
xd的约束,机械限位
±
xd关于测量零位左右对称,且0《xd《d0。无拖曳推力器则需要在
±
x方向均有布置。
[0050]
步骤(2)基本动力学协调条件。
[0051]
加速度控制量的最大值为:
[0052][0053]
式中,f
t
为无拖曳推力器输出推力;m为卫星质量,在严格意义上不含检验质量本身的质量。
[0054]
由位移模式单自由度无拖曳控制动力学方程可见,若要将检验质量相对位移x控制在机械限位以内的任意位置处,则加速度控制量应当满足以下条件:
[0055]
max(|au|)》max[|a
ns
(xd)|,|a
ns
(-xd)|]+max(|ad|)
[0056]
即:
[0057]
max(|f
t
|)》m{max[|a
ns
(xd)|,|a
ns
(-xd)|]+max(|ad|)}
[0058]
这是建造位移模式无拖曳控制系统的基本动力学协调条件。显然,该条件对负刚度力加速度函数a
ns
(x)需要考虑自引力的情形仍然适用。在检验质量初始位置处于机械限位区间[-xd,xd]内任意位置情形下,这是位移模式无拖曳控制系统能将其控制到该区间任意指令位移处的必要条件。
[0059]
在工程实际中,为了保证控制过渡过程的快速性,常常要求:
[0060]
max(|f
t
|)>>m{max[|a
ns
(xd)|,|a
ns
(-xd)|]+max(|ad|)}
[0061]
即推力器最大推力应比机械限位处负刚度力加速度绝对值最大值与非保守外干扰力加速度绝对值最大值之和与卫星质量的乘积大一个量级左右。
[0062]
步骤(3)切换动力学方程与让步动力学协调条件。
[0063]
在步骤(1)单自由度无拖曳控制动力学方程的基础上,退化得到一个切换动力学方程如下:
[0064][0065]
式中,
[0066][0067]
称为控制能力加速度。其中sign为取符号函数。
[0068]
在位移模式无拖曳控制系统不满足基本动力学协调条件的情况下,若检验质量从静电悬浮控制模式释放进入位移无拖曳控制模式的初始状态或/和检验质量的指令位移在相空间中偏离负刚度力加速度零位x
fns0
较远,无论控制器如何设计,系统都将丧失将检验质量控制到该零位附近指令位移处的能力。但在检验质量初始状态处于负刚度力加速度零位x
fns0
附近时,系统将检验质量控制到该零位附近指令位移处的必要条件仍然具备。这就是位移模式无拖曳控制系统在不满足基本动力学协调条件情况下必须满足的让步动力学协调条件,即,检验质量从静电悬浮控制模式释放进入位移无拖曳控制模式的初始状态相点必须落在相平面中负刚度力加速度零位x
fns0
附近的特定区域以内,且指令位移也必须落在该区域以内。
[0069]
让步动力学协调条件所对应的相平面区域由常值加速度a及负刚度力加速度函数a
ns
(x)的具体表达式决定,即由最大推力加速度、最大非保守外干扰力加速度与非线性负刚度力加速度共同决定。
[0070]
以负刚度力加速度仅由静电偏压力加速度提供为例,在负刚度力加速度零位x
fns0
=0情形下,切换动力学方程进一步写成:
[0071][0072]
这是一个非线性保守系统,其状态空间格式为:
[0073][0074]
保守系统必然存在定常的hamilton函数h(x,v),即有:
[0075][0076]
式中t为时间,从上式容易见到,取:
[0077][0078]
即可满足hamilton函数h(x,v)的定常性,故x与v两个状态量在hamilton函数h(x,v)中没有交叉相乘项,由此容易建构该函数为:
[0079][0080]
并且对应势能的函数f(x)满足:
[0081]f′
(x)=-f(x)
[0082]
将f(x)在[0,x]区间上完成解析积分,得到hamilton函数的最终解析表达式:
[0083][0084]
以a=0.5882μm/s2、xd=10μm且
[0085][0086]
中c=3.13875
×
10-16
m3/s2、d0=15μm为数值算例,图3给出相应的hamilton函数曲面。该图给出的(x,v)平面中的等值线投影对应相平面中不同初状态相轨迹。
[0087]
为了求得图3极限环/发散相轨迹的分界相轨迹,需要先找到图3曲面的极值点。在hamilton函数曲面极值点处有:
[0088][0089]
该式给出该极值点应满足的方程:
[0090][0091]
将f(x)表达式代入上式第一式,得到位移坐标x应满足的方程为:
[0092][0093]
上式的根的解析表达式十分复杂,在工程中可采用matlab函数fzero求得,具体包括正根x
p
及负根xn。
[0094]
将正根x
p
或负根xn与v=0一道代入hamilton函数的最终解析表达式,得到该函数在极值点处的取值为:
[0095]
h(x,v)=ch[0096]
这就是hamilton函数极值点等值线方程。该等值线对应的(x,v)平面的相轨迹就是分界线相轨迹。联立上式与hamilton函数的最终解析表达式,容易给出分界线相轨迹的解析表达式如下:
[0097][0098]
完整的分界线相轨迹由上式取正取负两种情形的曲线拼接而成。
[0099]
实际上,任意指定一个初始状态(x,v)=(x0,v0),由hamilton函数的最终解析表达
式可计算出一个对应的常数:
[0100][0101]
从这个常数c
h0
出发,容易给出分界线相轨迹内部极限环相轨迹或外部发散相轨迹的解析表达式如下:
[0102][0103]
完整的极限环相轨迹或发散相轨迹由上式取正取负两种情形的曲线拼接而成。当c
h0
《0或c
h0
》ch时,相轨迹为发散相轨迹曲线;当ch》c
h0
≥0时,相轨迹为极限环或发散相轨迹曲线,具体取决于初值落在分界线相轨迹内部还是外部。分界线相轨迹、极限环及发散相轨迹拼合在一起构成反映切换动力学方程全局动力学行为的全局相轨迹。
[0104]
将该分界线相轨迹与其内部极限环相轨迹及其外发散相轨迹绘制在一张相平面图上,得到图4。图中圆点“.”为仿真任意选择的初始状态点,实线为从初始相点出发的相轨迹,往远离圆点的方向运动;图中虚线
“‑‑”
为分界线相轨迹。分界线相轨迹围成的封闭区域即为让步动力学协调条件区域。
[0105]
图5给出图4分界线相轨迹及其退化的线性情形下的渐进直线段对比图。由图5容易看出,由于负刚度力加速度函数非线性的引入,让步动力学协调条件所对应的初值状态区域相对于未引入非线性情形明显地缩小了。
[0106]
负刚度力加速度零位x
fns0
≠0时的让步动力学协调条件由x
fns0
=0时的相图整体随中心沿横轴平移距离x
fns0
即可得到。
[0107]
步骤(4)避免指令推力为最大推力的检验质量初始状态及指令状态设置方法。
[0108]
位移模式单自由度无拖曳控制动力学方程对应的控制对象在引入闭环控制后,即使检验质量状态初值及指令状态均满足让步动力学协调条件,如果这两者在相平面中离负刚度力零位所对应的中心点太远,将容易出现控制器所生成的指令推力为正、负最大推力的情况。实际上,指令推力长时间处于饱和值常常导致检验质量过渡过程状态相点跑到让步动力学协调条件对应区域之外,从而导致系统发散。
[0109]
基于上述内容,在位移模式无拖曳控制中,应使检验质量初始状态及指令状态在相平面中在让步动力学协调条件区域内远离区域边界并尽可能靠近负刚度力零位,这就是避免指令推力为最大推力的位移模式无拖曳控制方法。
[0110]
图6与图7是在图4对应实例基础上引入闭环pid控制、测量噪声、执行噪声及推力分辨率后的一组仿真结果,最大推力限定为50μn。图6左侧是由实线相轨迹形成的黑色斑点,表明在指令位移及初始状态均与负刚度力零位重合情况下,相轨迹运动范围很小,对应指令推力如图7实线所示,基本只在零值附近波动。图6右侧是由虚线形成的相轨迹,表明在指令位移及初始状态与负刚度力零位相隔较远情况下,相轨迹运动范围较大,已经接近图4的动力学协调条件区域的边界,对应指令推力如图7虚线所示,两次达到负值最大推力,一次达到正值最大推力。
[0111]
实施例2:
[0112]
一种位移模式无拖曳控制让步动力学协调条件确定方法,包括如下步骤:
[0113]
将位移模式单自由度无拖曳控制动力学方程退化为一个切换动力学方程;
[0114]
通过该切换动力学方程的hamilton函数,获得切换动力学方程的全局动力学分界线相轨迹的解析表达式,即确定无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件。
[0115]
一种非线性扰动下无拖曳动力学协调条件确定方法,包括如下步骤:
[0116]
确定位移模式单自由度无拖曳控制动力学方程及负刚度力加速度函数;
[0117]
利用负刚度力加速度函数,确定位移模式无拖曳控制系统的基本动力学协调条件;
[0118]
在不满足位移模式无拖曳控制系统的基本动力学协调条件的情况下,将位移模式单自由度无拖曳控制动力学方程退化为一个切换动力学方程;通过该切换动力学方程的hamilton函数,获得切换动力学方程的全局动力学分界线相轨迹的解析表达式,即确定无拖曳推力器最大推力不足时的位移模式无拖曳控制让步动力学协调条件。
[0119]
优选的,基于切换动力学方程,通过建立hamilton函数及hamilton函数极值点等值线方程,导出切换动力学方程的全局动力学相轨迹解析表达式,其中包括分界线相轨迹的解析表达式。
[0120]
优选的,确定位移模式无拖曳控制系统的基本动力学协调条件具体为:
[0121]
正机械限位处负刚度力加速度绝对值与负机械限位处负刚度力加速度绝对值中较大者,加上非保守外干扰力加速度绝对值最大值之和,小于推力器最大推力除以卫星质量。
[0122]
优选的,确定位移模式无拖曳控制系统的基本动力学协调条件具体为:
[0123]
正机械限位处负刚度力加速度绝对值与负机械限位处负刚度力加速度绝对值中较大者,加上非保守外干扰力加速度绝对值最大值之和,远小于推力器最大推力除以卫星质量。
[0124]
一种位移模式无拖曳控制方法,利用上述确定无拖曳推力器最大推力不足时的位移模式无拖曳控制基本动力学协调条件及让步动力学协调条件,然后确定避免指令推力为最大推力的检验质量初始状态及指令状态设置原则。
[0125]
优选的,位移模式单自由度无拖曳控制系统检验质量初始状态及指令状态应当满足的让步动力学协调条件,对应为切换动力学方程在相平面中所有极限环所占据的区域。
[0126]
优选的,所有极限环所占据的区域即相平面中发散相轨迹与极限环相轨迹的分界线所围成的区域。
[0127]
优选的,发散相轨迹与极限环相轨迹的分界线通过hamilton函数极值点等值线方程求解。
[0128]
优选的,避免指令推力为最大推力的检验质量初始状态及指令状态设置原则为:检验质量初始状态及指令状态应尽量靠近负刚度力零位。
[0129]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
[0130]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明
的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1