一种融合全局及局部算法的路径规划方法及装置与流程
1.本发明涉及一种融合全局及局部算法的路径规划方法及装置。
背景技术:
2.对于机器人运动轨迹的规划,在全局路径规划技术方面已经取得了不错成果,但是全局规划仅适用于活动区域信息己知的情况,当环境比较复杂时,如存在各种不规则障碍物时,全局路径规划可能无法适用,而且现有技术中的全局路径规划还存在冗余节点过多、拐点过多、路径过长的缺陷。而局部路径规划虽然可以在环境未知的情况下使用,但其在复杂环境中计算量过大,消耗时间过长。现有技术中也有将全局路径规划和局部路径规划融合的方案,但是仍然存在拐点过多、路径不平滑、冗余节点过多、路径过长、最终路径与全局路径相差较大、速度与安全性无法同时满足的缺陷。
技术实现要素:
3.本发明提出一种融合全局及局部算法的路径规划方法及装置,路径平滑且无冗余节点,提升效率,且在完成动态避障的同时还有方向性地快速逼近终点,兼具速度与安全性。
4.本发明通过以下技术方案实现:
5.一种融合全局及局部算法的路径规划方法,包括如下步骤:
6.步骤s1:初始化栅格地图,设置障碍物位置、起始节点s和目标节点g;
7.步骤s2:通过基于16邻域搜索的a*算法进行全局路径规划,得到路径点集合closelist=[c1,c2,
…cn
],其中,c1=s,cn=g;
[0008]
步骤s3:判断路径点集合closelist中相邻的三点是否共线,若是不共线,则将相邻三点的中间点作为关键点进行提取,若是共线,则将相邻三点的中间点作为冗余点删除,最终形成关键点集合keylist=[k1,k2,
…
,km],其中,k1=s,km=g;
[0009]
步骤s4:判断关键点集合keylist中,ki与k
i+2
的连线是否与障碍物相交,若是,则提取k
i+1
作为优化路径点,否则,将k
i+1
从关键点集合keylist中删除,最终形成优化路径集合lastlist=[l1,l2,
…
,lz],其中,l1=s,lz=g,1≤i≤m-2;
[0010]
步骤s5:将优化路径集合lastlist中的路径点作为局部路径规划的子目标,并在预设的速度空间进行采样,针对每个速度采样点均利用dwa算法进行轨迹预测,得到多个运动轨迹,并利用评估函数选择最优的运动轨迹控制机器人运动,heading(v,w)、dist(v,w)、vel(v,w)和path(v,w)分别用于衡量对子目标的方向性、表示运动轨迹中距离障碍物的最小距离、评价当前速度大小和用于衡量与子目标的距离,α、β、γd和分别为加权系数,γd与机器人到最近障碍物的距离相关,v、w分别为线速度和角速度。
[0011]
进一步的,所述步骤s5中,将优化路径集合lastlist中的路径点作为局部路径规
划的子目标,具体为:
[0012]
依次将优化路径集合lastlist中的路径点作为子目标g
min
,但当机器人与子目标g
min
=li的距离小于第一阈值时,设置g
min
=l
i+1
,当子目标为g
min
=li且l
i+j
出现在最优的动作轨迹中时,设置g
min
=l
i+j
,其中,第一阈值与机器人底盘半径相关,j>0。
[0013]
进一步的,所述步骤s5中,其中,γ
max
为最短时间通过障碍物密集区域的对应值,γ
min
为通过障碍物密集区域最安全的对应值,d为机器人到最近障碍物的距离,v
max
为预设的最大线速度,va为预设的线加速度。
[0014]
进一步的,所述步骤s2具体包括如下步骤:
[0015]
步骤s21:创建空集openlist和closelist,将起始节点s存储到closelist中;
[0016]
步骤s22:寻找起始节点s周围16个方向上可以到达的24个节点,将它们放入openlist中,并设置它们的父节点为s,其中,以节点s为原点,24个节点的坐标为:[[1,0],[0,1],[-1,0],[0,-1],[-1,-1],[-1,1],[1,-1],[1,1],[2,0],[0,2],[-2,0],[0,-2],[-2,-2],[-2,2],[2,-2],[2,2],[1,3],[3,1],[3,-1],[1,-3],[-1,3],[-3,1],[-3,-1],[-1,-3]];
[0017]
步骤s23:将节点s从从openlist放入closelist中,再分别计算步骤s22中各节点的f值,并将f值最小的节点a从openlist放入closelist中,再将节点a周围16个方向上除了障碍物和已在closelist中的节点,其他可以到达的节点均放入openlist中,设置这些节点的父节点为a,并以节点a为当前节点,分别计算以这些节点为目标节点的f值,其中,f=g+h,f值表示从起始节点到目标节点的代价消耗,g值表示从起始节点到当前节点的实际消耗,h值表示从当前节点到目标节点的估计代价消耗;
[0018]
步骤s24:按照步骤s23继续从openlist中找出f值最小的节点,并将其从openlist放入closelist中,再将该节点设置为父节点,直至openlist中出现目标节点g,逆序遍历父节点即可得到路径点集合closelist=[c1,c2,
…cn
]。
[0019]
进一步的,所述步骤s23中,若节点a可以到达的节点b本就已经在openlist中,则计算从起始节点s经节点a到达节点b的g值,将该g值与从起始节点s直接到达节点b的g值进行比较,若前者更低,则将节点b的父节点修改为a,并重新计算节点b的f值,否则,则不作改变。
[0020]
进一步的,所述步骤s3中,设ci(xi,yi)、c
i+1
(x
i+1
,y
i+1
)和c
i+2
(x
i+2
,y
i+2
)为路径点集合closelist中相邻的三点,若(x
i+1-xi)(y
i+2-y
i+1
)=(y
i+1-yi)(x
i+2-x
i+1
)成立,判定ci(xi,yi)、c
i+1
(x
i+1
,y
i+1
)和c
i+2
(x
i+2
,y
i+2
)共线,否则,判定ci(xi,yi)、c
i+1
(x
i+1
,y
i+1
)和c
i+2
(x
i+2
,y
i+2
)不共线,其中,1≤i≤n-2。
[0021]
进一步的,所述步骤s5具体包括如下步骤:
[0022]
步骤s51:将优化路径集合lastlist中的路径点添加到所述栅格地图中,并设置机器人底盘半径以及dwa算法所需要的参数,该参数包括最大线速度、最小线速度、最大角速度、最小角速度、最大线加速度、最大角加速度、线速度分辨率、角速度分辨率、采样周期、向前预测时间;
[0023]
步骤s52:按照采样周期在由步骤s51所述的参数所形成的速度空间进行速度采样,针对每个速度采样点,均利用dwa算法生成向前预测时间内的运动轨迹,从而得到多个运动轨迹;
[0024]
步骤s53:利用评估函数g(v,w)给各运动轨迹进行打分,选择最优的运动轨迹,并将该运动轨迹所对应的采样速度作为机器人下一时刻的速度;
[0025]
步骤s54:判断最优运动轨迹是否达到目标点,若是,输出该运动轨迹,否则,再次进入步骤s52,重新进行采样。
[0026]
根据权利要求1或2或3所述的一种融合全局及局部算法的路径规划方法,其特征在于:所述步骤s5中,在利用评估函数g(v,w)进行打分前,分别对heading(v,w)、dist(v,w)、vel(v,w)和path(v,w)进行归一化。
[0027]
进一步的,所述h值即为当前节点到目标节点的欧式距离。
[0028]
本发明还通过以下技术方案实现:
[0029]
一种融合全局及局部算法的路径规划装置,包括:
[0030]
初始化模块:用于初始化栅格地图,设置障碍物位置、起始节点s和目标节点g;
[0031]
全局规划模块:用于通过基于5
×
5搜索邻域的a*算法进行全局路径规划,得到路径点集合closelist=[c1,c2,
…cn
],其中,c1=s,cn=g;
[0032]
关键点提取模块:用于判断路径点集合closelist中相邻的三点是否共线,若是不共线,则将相邻三点的中间点作为关键点进行提取,若是共线,则将相邻三点的中间点作为冗余点删除,最终形成关键点集合keylist=[k1,k2,
…
,km],其中,k1=s,km=g;
[0033]
冗余点删除模块:用于判断关键点集合keylist中,ki与k
i+2
的连线是否与障碍物相交,若是,则提取k
i+1
作为优化路径点,否则,将k
i+1
从关键点集合keylist中删除,最终形成优化路径集合lastlist=[l1,l2,
…
,lz],其中,l1=s,lz=g,1≤i≤m-2;
[0034]
轨迹确定模块:用于将优化路径集合lastlist中的路径点作为局部路径规划的子目标,并在预设的速度空间进行采样,针对每个速度采样点均利用dwa算法进行轨迹预测,得到多个运动轨迹,并利用评估函数选择最优的运动轨迹控制机器人运动,heading(v,w)、dist(v,w)、vel(v,w)和path(v,w)分别用于衡量对子目标的方向性、表示运动轨迹中距离障碍物的最小距离、评价当前速度大小和用于衡量与子目标的距离,α、β、γd和分别为加权系数,γd与机器人到最近障碍物的距离相关,v、w分别为线速度和角速度。
[0035]
本发明具有如下有益效果:
[0036]
1、本发明先基于16邻域搜索的a*算法进行全局路径规划以得到路径点集合closelist,然后根据closelist中相邻三点是否共线进行关键点提取以得到关键点集合keylist,再将关键点集合keylist中的冗余点删除,得到优化后的全局路径集合lastlist,最后将优化后的全局路径集合lastlist作为局部路径规划的子目标,并在预设的速度空间进行采样,针对每个速度采样点均利用dwa算法进行轨迹预测,并利用评估函数选择最优的运动轨迹控制机器人运动,如此将全局路径规划和局部路径规划融合,得到在完成动态避障的同时还有方向性地快速逼近终点的最优路径,兼具速度与安全性,当出现未知障碍物时,机器人在行驶过程中不会与故障物发生碰撞,且始终沿着全局最优路径的目标方向行
驶,提升了路径规划的效率和实时性;在全局路径规划部分,增大搜索范围,避免出现拐点过多的现象,且提取关键点,删除冗余点,精简路径且使路径更为平滑;评价函数中的加权系数γd与机器人到最近障碍物的距离相关,保证了路径与动态障碍物之间的距离,且使机器人能够根据环境的变化自动调整该加权系数,从而得到机器人的最佳运动速度,以获得更安全合理的路径。
附图说明
[0037]
下面结合附图对本发明做进一步详细说明。
[0038]
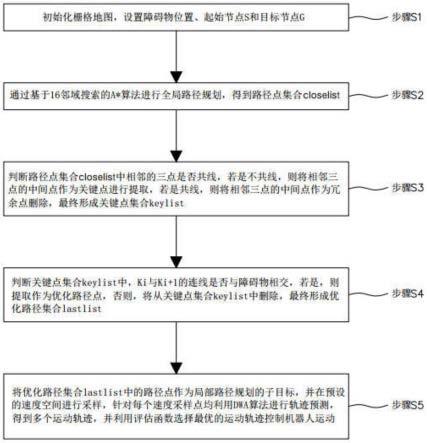
图1为本发明流程图。
[0039]
图2-1为现有技术中8邻域搜索方式示意图。
[0040]
图2-2为本发明中16邻域搜索方式示意图。
[0041]
图3为本发明中全局路径规划的路径仿真图。
[0042]
图4为本发明中全局与局部融合路径规划的路径仿真图。
[0043]
其中,1、已知障碍物;2、未知障碍物;3、动态障碍物;31、动态障碍物运动轨迹;4、优化路径集合lastlist中的路径点。
具体实施方式
[0044]
如图1所示,融合全局及局部算法的路径规划方法,包括如下步骤:
[0045]
步骤s1:初始化栅格地图,设置障碍物位置、起始节点s和目标节点g;
[0046]
步骤s2:通过基于16邻域搜索的a*算法进行全局路径规划,得到路径点集合closelist=[c1,c2,
…cn
],其中,c1=s,cn=g;
[0047]
具体包括如下步骤:
[0048]
步骤s21:创建空集openlist和closelist,openlist是存放等待检查的节点的列表,closelist是存放不再需要检查的节点的列表,将起始节点s存储到closelist中;
[0049]
步骤s22:寻找起始节点s周围16个方向上可以到达的24个节点,将它们放入openlist中,并设置它们的父节点为s,其中,16邻域搜索方式如图2-2所示,以节点s为原点,24个节点的坐标为:[[1,0],[0,1],[-1,0],[0,-1],[-1,-1],[-1,1],[1,-1],[1,1],[2,0],[0,2],[-2,0],[0,-2],[-2,-2],[-2,2],[2,-2],[2,2],[1,3],[3,1],[3,-1],[1,-3],[-1,3],[-3,1],[-3,-1],[-1,-3]];
[0050]
与如图2-1所示的8邻域搜索方式不同,16邻域搜索方式能够去除同方向的多余冗余子节点,提高搜索效率;
[0051]
步骤s23:将节点s从从openlist放入closelist中,再分别计算步骤s22中各节点的f值,并将f值最小的节点a从openlist放入closelist中,再将节点a周围16个方向上除了障碍物和已在closelist中的节点,其他可以到达的节点均放入openlist中,设置这些节点的父节点为a,并以节点a为当前节点,分别计算以这些节点为目标节点的f值,其中,f=g+h,f值表示从起始节点到目标节点的代价消耗,g值表示从起始节点到当前节点的实际消耗,h值表示从当前节点到目标节点的估计代价消耗,选取当前节点与目标节点之间的欧式距离作为h值;
[0052]
若节点a可以到达的节点b本就已经在openlist中,则计算从起始节点s经节点a到
达节点b的g值,将该g值与从起始节点s直接到达节点b的g值进行比较,若前者更低,则将节点b的父节点修改为a,并重新计算节点b的f值,否则,则不作改变;
[0053]
步骤s24:按照步骤s23继续从openlist中找出f值最小的节点,并将其从openlist放入closelist中,再将该节点设置为父节点,直至openlist中出现目标节点g,逆序遍历父节点即可得到路径点集合closelist=[c1,c2,
…cn
],若openlist中没有了数据,则说明没有合适路径,将重新设置起始点和目标点;
[0054]
步骤s3:创建空集keylist作为关键点集合,将c1添加至keylist中,判断路径点集合closelist中相邻的三点ci(xi,yi)、c
i+1
(x
i+1
,y
i+1
)和c
i+2
(x
i+2
,y
i+2
)是否共线,若是不共线,即(x
i+1-xi)(y
i+2-y
i+1
)=(y
i+1-yi)(x
i+2-x
i+1
)成立,则将相邻三点的中间点c
i+1
(x
i+1
,y
i+1
)作为关键点进行提取,若是共线,即(x
i+1-xi)(y
i+2-y
i+1
)=(y
i+1-yi)(x
i+2-x
i+1
)不成立,则将相邻三点的中间点c
i+1
(x
i+1
,y
i+1
)作为冗余点删除,再令i=i+1,再次进行共线判断,最终形成关键点集合keylist=[k1,k2,
…
,km],其中,k1=s,km=g,1≤i≤n-2;
[0055]
步骤s4:创建空集lastlist作为优化路径集合,将k1添加至lastlist中,判断关键点集合keylist中,ki与k
i+2
的连线是否与障碍物相交,若是,则提取k
i+1
作为优化路径点添加至lastlist内,否则,将k
i+1
从关键点集合keylist中删除,最终形成优化路径集合lastlist=[l1,l2,
…
,lz],规划出的路径如图3所示,其中,l1=s,lz=g,1≤i≤m-2;
[0056]
步骤s5:将优化路径集合lastlist中的路径点作为局部路径规划的子目标,并在预设的速度空间进行采样,针对每个速度采样点均利用dwa算法进行轨迹预测,得到多个运动轨迹,并利用评估函数选择最优的运动轨迹控制机器人运动,如图4所示即为规划出的路径,该采样速度包括线速度和角速度;α、β、γd和分别为加权系数,γd与机器人到最近障碍物的距离相关,v、w分别为线速度和角速度;
[0057]
具体包括如下步骤:
[0058]
步骤s51:将优化路径集合lastlist中的路径点添加到所述栅格地图中,并设置机器人底盘半径r以及dwa算法所需要的参数,该参数包括最大线速度、最小线速度、最大角速度、最小角速度、最大线加速度、最大角加速度、线速度分辨率、角速度分辨率、采样周期、向前预测时间以及评估函数的加权系数α、β和
[0059]
步骤s52:按照采样周期在由步骤s51所述的参数所形成的速度空间进行速度采样,针对每个速度采样点,均利用dwa算法生成向前预测时间内的运动轨迹,从而得到多个运动轨迹,这个过程为现有技术;
[0060]
步骤s53:分别通过各运动轨迹,计算机器人与最近障碍物的距离(x
t
,y
t
)为机器人当前坐标,(x0,y0)为障碍物坐标,计算动态范围阈值v
max
为预设的最大线速度,va为预设的最大线加速度,并根据公式计算加权系数γd,γ
max
为最短时间通过障碍物密
集区域的对应值(“最短时间”的具体时长由实际情况中障碍物密集程度而定),γ
min
为通过障碍物密集区域最安全的对应值;
[0061]
则评估函数的各个加权系数均已确定,可利用评估函数进行评价打分,以选择最优的运动轨迹,并将该运动轨迹所对应的采样速度作为机器人下一时刻的速度,其中,
[0062]
其中,子函数用于衡量机器人对子目标的方向性,θg为机器人指向目标节点与水平线的夹角,θ
t
为机器人行进方向与水平线的夹角,两者差值越小,说明与目标节点的方位差越小;
[0063]
子函数表示运动轨迹中距离障碍物的最小距离,d表示计算机器人与最近障碍物的距离,为保证机器人移动安全性,在机器人底盘半径r的基础上增加0.2r的安全距离,当机器人到障碍物的距离大于机器人底盘半径r时一般不会发生碰撞,此时子函数值为0,即不发生碰撞时不考虑障碍物距离评价;当机器人到障碍物的距离小于或等于r时,机器人发生碰撞的可能性较大,此时值随着距离的减小而增大,即距离越近发生碰撞的影响越大;
[0064]
子函数用于评价机器人当前速度v大小,速度v越大,则评价得分越高;
[0065]
子函数用于衡量向前预估时间内所预测的点(xm,ym)与子目标(xa,ya)的距离;
[0066]
但在评价之前,要对上述4个子函数进行归一化处理:
[0067]
其中,i表示所预测的第i条预测轨迹,n表示共有n条预测轨迹;
[0068]
步骤s54:判断最优运动轨迹是否达到目标点,若是,输出该运动轨迹,否则,再次
进入步骤s52,重新进行采样。
[0069]
如图3所示为全局路径规划的路径仿真图,图4为全局与局部融合的路径仿真图,当仅有已知障碍物1,而未出现未知障碍物2时,机器人根据优化路径集合lastlist中的路径点4所形成的路径行驶,但可看出,如此无法避开未知障碍物2,且会和动态障碍物的运动轨迹31相交,而图4中,当出现未知障碍物2和动态障碍物3时,机器人能够自动避开障碍物,不会与障碍物发生碰撞,且还是会沿着优化路径集合lastlist中的路径点所形成的路径方向行驶。
[0070]
对应的,一种融合全局及局部算法的路径规划装置,包括:
[0071]
初始化模块:用于初始化栅格地图,设置障碍物位置、起始节点s和目标节点g;
[0072]
全局规划模块:用于通过基于5
×
5搜索邻域的a*算法进行全局路径规划,得到路径点集合closelist=[c1,c2,
…cn
],其中,c1=s,cn=g;
[0073]
关键点提取模块:用于判断路径点集合closelist中相邻的三点是否共线,若是不共线,则将相邻三点的中间点作为关键点进行提取,若是共线,则将相邻三点的中间点作为冗余点删除,最终形成关键点集合keylist=[k1,k2,
…
,km],其中,k1=s,km=g;
[0074]
冗余点删除模块:用于判断关键点集合keylist中,ki与k
i+2
的连线是否与障碍物相交,若是,则提取k
i+1
作为优化路径点,否则,将k
i+1
从关键点集合keylist中删除,最终形成优化路径集合lastlist=[l1,l2,
…
,lz],其中,l1=s,lz=g,1≤i≤m-2;
[0075]
轨迹确定模块:用于将优化路径集合lastlist中的路径点作为局部路径规划的子目标,并在预设的速度空间进行采样,针对每个速度采样点均利用dwa算法进行轨迹预测,得到多个运动轨迹,并利用评估函数选择最优的运动轨迹控制机器人运动,heading(v,w)、dist(v,w)、vel(v,w)和path(v,w)分别用于衡量对子目标的方向性、表示运动轨迹中距离障碍物的最小距离、评价当前速度大小和用于衡量与子目标的距离,α、β、γd和分别为加权系数,γd与机器人到最近障碍物的距离相关,v、w分别为线速度和角速度。
[0076]
以上所述,仅为本发明的较佳实施例而已,故不能以此限定本发明实施的范围,即依本发明申请专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1