一种考虑障碍船危险行为的船舶动态避障制导与控制方法
1.本发明涉及船舶控制工程及船舶自动化航行装备应用领域,尤其涉及一种考虑障碍船危险行为的船舶动态避障制导与控制方法。
背景技术:
2.在航海领域,欠驱动船舶路径跟踪控制系统由导航、制导和控制3个子系统构成
[1,2]
。制导系统根据当前船舶所执行航行任务,基于船舶此时与期望路径之间的位置关系,自动解算出参考船舶航向信息,并将信号传到控制系统;控制系统根据制导系统传送的参考信号,通过镇定此时船舶姿态与参考船舶航向之间的误差使系统实现有效且稳定的收敛;导航系统将能够将本船及目标船舶或物体的位置、姿态等信息通过gps等传感器传送到制导和控制系统。三个子系统保证船舶的路径跟踪任务得以稳定的进行。
[0003]
对于制导系统,传统的制导方法大多数仅考虑船舶的路径跟踪任务。视距法(los)和基于航路点的动态小船法(dvs)被广泛应用于船舶制导中
[3]
。但实际航行环境中,船舶会不可避免地遇到障碍物,特别是移动的障碍船舶,这也成为威胁船舶安全航行最大的威胁因素之一
[4,5]
,并且当障碍船舶采取危险行为时,目前制导算法并不能为船舶提供有效的避障参考信号。如近几年严重的“桑吉轮”事故,便是由于两船未及时采取避碰行为,并且其中一船采取了恶化碰撞局面的行为,从而导致事故的发生。
[0004]
对于控制系统,当船舶航行在实际海洋环境中会受到海风和海浪的影响,船舶闭环控制系统会因此发生抖震
[6]
,未保证系统稳定,控制输入需要频繁更新,这会对过度占用船载计算机的资源并加快了舵机的磨损
[7]
。
[0005]
基于以上分析,常规欠驱动船舶路径跟踪任务制导和控制算法目前还存在以下2点缺陷:
[0006]
1、传统的船舶制导算法无法不能引导船舶在遇到移动障碍船舶时进行路径跟踪任务。
[0007]
2、船舶受海洋环境扰动情况下,控制输入频繁更新,控制输入更容易发生抖震,过度占用计算机资源以及增大通信信道传输负载。
[0008]
基于航路点的lvs制导算法在船舶运动控制领域具有广泛的应用
[8]
,虽然可以令船舶完成路径跟踪任务,但船舶在航行时不可避免地会遇到障碍物,特别是移动的障碍船舶,这会极大的威胁船舶的安全航行
[9]
。并且对于移动障碍船舶,避障行为必须符合国际避碰规则
[10]
。目前虽然存在诸多避障算法,如遗传算法,蚁群算法等。这些算法虽然可以获得可行的避障信号,但大都需要对环境以及障碍物进行提前建模,计算复杂,消耗大量计算机资源,实时性不强,很难应用到实际工程中
[11]
。另外在很多碰撞事故中,障碍船舶采取了恶化会遇局面的行为是主要的事故原因。因此开发一种计算简便,实时性较强,并且具有较强的反应性以应对障碍船危险行为的避障制导算法对于船舶的安全航行具有重要的意义。
[0009]
对于船舶运动控制算法,在复杂海洋环境下,为保证闭环系统的稳定性以及控制效果。控制输入需要不断地更新,甚至长时间的进行抖震
[12]
,这会过度占用通信信道和计
算机资源,进而导致舵机磨损,影响控制系统的稳定性。若可以将控制输入离散化并收敛到有限的集合内,同时保证控制效果,那么船舶通信信道可以得到极大的缓解,在一定程度上节约计算机资源。
[0010]
基于以上分析,常规欠驱动船舶制导与控制算法存在以下两点缺陷:
[0011]
现有制导算法对于移动障碍船舶,特别是采取危险行为的障碍船,很难实时地得到有效避障信号,无法保障船舶安全航行。
[0012]
现有控制算法在受复杂海洋环境扰动下,会过度占用计算机和通信信道资源,造成控制系统的传输负载过大,降低控制效果。
[0013]
[1]郭晨,汪洋,孙富春,沈智鹏.欠驱动水面船舶运动控制研究综述[j].控制与决策,2009,24(03):321-329.
[0014]
[2]张国庆,张显库,关巍.欠驱动船舶简捷鲁棒自适应路径跟踪控制[j].哈尔滨工程大学学报,2014,35(09):1053-1059.
[0015]
[3]zhang g,zhang x.a novel dvs guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning.isa transactions.2015;56:75-85.
[0016]
[4]沈海青.基于强化学习的无人船舶避碰导航及控制[d].大连海事大学,2018.
[0017]
[5]campbell s,naeem w,irwin gw.a review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres.annual reviews in control.2012;36:267-83.
[0018]
[6]张贺,姚杰,隋江华,邓英杰,张国庆.基于dsc的欠驱动船舶路径跟踪神经滑模控制[j].船舶工程,2019,41(10):85-90.
[0019]
[7]zhang g,gao s,li j,zhang w.adaptive neural fault-tolerant control for course tracking of unmanned surface vehicle with event-triggered input.proc inst mech eng part i-j syst control eng.2021;235:1594-604.
[0020]
[8]zhang g,deng y,zhang w,huang c.novel dvs guidance and path-following control for underactuated ships in presence of multiple static and moving obstacles.ocean engineering.2018;170:100-10
[0021]
[9]kuwata y,wolf mt,zarzhitsky d,huntsberger tl.safe maritime autonomous navigation with colregs,using velocity obstacles.ieee journal ofoceanic engineering.2014;39:110-9
[0022]
[10]li j,zhang g,liu c,zhang w.colregs-constrained adaptive fuzzy event-triggered control for underactuated surface vessels with the actuator failures.ieee transactions on fuzzy systems.2021;29:3822-32.
[0023]
[11]王程博,张新宇,邹志强,王少博.基于q-learning的无人驾驶船舶路径规划[j].船海工程,2018,47(05):168-171.
[0024]
[12]zhang g,deng y,zhang w,huang c.novel dvs guidance and path-following control for underactuated ships in presence of multiple static and moving obstacles.ocean engineering.2018;170:100-10.
技术实现要素:
[0025]
本发明提供一种考虑障碍船危险行为的船舶动态避障制导与控制方法,以克服上述技术问题。
[0026]
一种考虑障碍船危险行为的船舶动态避障制导与控制方法,包括,
[0027]
步骤1、建立第一虚拟小船、第二虚拟小船、虚构小船、本船数学模型;根据航路点产生全局参考路径,第一虚拟小船基于全局参考路径航行;
[0028]
步骤2、设置虚构小船的探测范围,通过gps传感器获取障碍船的位置信息,计算障碍船与本船之间的空间距离,根据探测范围与所述空间距离的大小关系判断本船与障碍船是否存在碰撞危险,
[0029]
当空间距离大于探测范围时,表示不存在碰撞危险,则第二虚拟小船跟随第一虚拟小船航行,本船跟随第二虚拟小船航行;
[0030]
所述第二虚拟小船跟随第一虚拟小船航行是指基于第一虚拟小船与第二虚拟小船位置信息,计算跟随参考信号,第二虚拟小船根据跟随参考信号进行跟随;
[0031]
当空间距离小于等于探测范围时,表示存在碰撞危险,则基于速度障碍法原理和虚构小船位置信息,计算避障参考信号,第二虚拟小船基于避障参考信号进行避障,本船跟随第二虚拟小船航行;
[0032]
所述本船跟随第二虚拟小船航行是指基于本船与第二虚拟小船的位置关系,计算本船参考航向信息,本船控制系统根据本船参考航向信息、本船当前船舶姿态信息控制本船航行。
[0033]
优选地,所述本船控制系统根据本船参考航向信息、本船当前船舶姿态信息控制本船航行包括,
[0034]
步骤2a、建立本船的欠驱动船舶运动学数学模型,根据第二虚拟小船计算本船的参考轨迹;
[0035]
步骤2b、根据本船的当前姿态以及第二虚拟小船的当前姿态,计算本船的制导信号,所述制导信号为参考航向角信号;
[0036]
步骤2c、根据本船与第二虚拟小船的位置关系,计算本船与第二虚拟小船的横纵坐标误差、位置和艏向角误差项;计算位置和艏向角误差项的导数;
[0037]
步骤2d、通过前进速度虚拟控制律、艏摇角速度虚拟控制律调整位置和艏向角误差项,再次根据动态面控制技术调整位置和艏向角误差项;
[0038]
步骤2e、根据事件触发机制将输入至控制器的参数离散化并限制在有限集合中,所述参数包括本船的舵角、前进速度虚拟控制律、艏摇角速度虚拟控制律;
[0039]
步骤2f、定义本船前进速度、本船艏摇角速度的误差动态,对本船前进速度、本船艏摇角速度的误差动态求导,构建鲁棒神经阻尼项,根据鲁棒神经阻尼项调整求导后的本船前进速度、本船艏摇角速度的误差动态;定义变量du和dr,du表示前进运动方向上的符合扰动项的最大值,dr表示艏摇运动方向上的符合扰动项的最大值,根据du和dr处理海洋扰动;设计关于本船主机转速和舵角的鲁棒自适应神经控制律和增益相关自适应律,根据鲁棒自适应神经控制律、增益相关自适应律计算本船的主机转速和舵角,控制系统根据主机转速和舵角控制本船航行。
[0040]
优选地,所述建立第一虚拟小船、第二虚拟小船、虚构小船、本船数学模型是指通
过公式(1)建立第一虚拟小船、第二虚拟小船数学模型,通过公式(2)建立虚构小船数学模型,根据公式(3)建立本船数学模型,
[0041][0042][0043][0044]
其中,(u
dl
,r
dl
)为第l虚拟小船的速度和角速度;r
p
表示船舶领域半径,c
p
表示虚构小船与第二虚拟小船之间的角度;x
dl
为第l虚拟小船的位置坐标的横坐标,y
dl
为第l虚拟小船的位置坐标的纵坐标,ψ
dl
为第l虚拟小船的艏向角;l=1,2;为第l虚拟小船的位置坐标的横坐标的一阶微分、为第l虚拟小船的位置坐标的纵坐标的一阶微分、为第l虚拟小船的艏向角的一阶微分、θ
p
为虚构小船的位置坐标的艏向角、y
p
为虚构小船的位置坐标的纵坐标、x
p
为虚构小船的位置坐标的横坐标、x
d2
第二虚拟小船的位置坐标的横坐标、y
d2
第二虚拟小船的位置坐标的纵坐标、ψ
d2
为第二虚拟小船的艏向角;u表示本船前进速度,v表示本船横荡速度,r表示本船艏摇角速度,x表示惯性坐标系下本船的船舶位置的横坐标,y表示惯性坐标系下本船的船舶位置的纵坐标,ψ表示惯性坐标系下本船的船舶位置的艏摇角;表示惯性坐标系下本船的船舶位置的横坐标的一阶微分、表示惯性坐标系下本船的船舶位置的纵坐标的一阶微分、表示惯性坐标系下本船的船舶位置的艏摇角的一阶微分。
[0045]
优选地,所述虚构小船的探测范围是指rv,ro,ri的总和,其中rv表示船舶转向过程的补偿值,ro表示障碍船危险行为的补偿值,ri表示不同规格障碍船的安全范围。
[0046]
优选地,所述基于速度障碍法原理和虚构小船位置信息,计算避障参考信号是指根据公式(4)计算本船船舶位置的艏摇角,以本船船舶位置的艏摇角作为避障参考信号,
[0047][0048]
其中,v
r0
表示期望的本船和障碍船之间相对速度;vo表示障碍船船速;ψo表示障碍船的航向;v表示本船船速;ψ表示本船船舶位置的艏摇角。
[0049]
优选地,所述步骤2a具体包括,
[0050]
建立本船的欠驱动船舶运动学数学模型是指根据公式(5)建立本船的数学模型,
[0051][0052]
其中,n表示本船的主机转速,δ表示本船的舵角,fu(v)表示本船前进速度的非线性函数,fv(v)表示本船横荡速度的非线性函数,fr(v)表示本船艏摇角速度的非线性函数,fu(v),fv(v),fr(v)用于描述高阶流体动力影响,d
wu
表示本船前进速度的外界海洋环境干扰,d
wv
表示本船横荡速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,mu表示本船前进速度的位置模型参数,mv表示本船横荡速度的位置模型参数,mr表示本船艏摇角速度的位置模型参数,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,u表示本船前进速度,v表示本船横荡速度,表示本船前进速度的一阶微分、表示本船横荡速度的一阶微分、表示本船艏摇角速度的一阶微分,tu(
·
),fr(
·
)根据公式(6)表示未知控制增益函数,
[0053][0054]
其中,ρw表示海水密度;d
p
表示螺旋桨的直径;j
p
表示螺旋桨的进速系数;k
t
表示螺旋桨推力系数;t
p
表示作用在船体水动力干涉程度;αh表示作用在舵上的力矩之间的干涉程度;xr表示舵叶的x坐标轴上的坐标;xh表示船舶重心的x坐标轴上的坐标;ar表示舵的面积;λr表示舵的纵横比;表示船舶前进速度,n表示本船的主机转速,δ表示本船的舵角;
[0055]
所述根据第二虚拟小船计算本船的参考轨迹是根据公式(7)计算本船的参考轨迹,
[0056][0057]
其中,表示第2虚拟小船的位置坐标的横坐标的一阶微分、表示第2虚拟小船的位置坐标的纵坐标的一阶微分、表示第2虚拟小船的艏向角的一阶微分、u
d2
表示第2虚拟小船的前进速度、r
d2
表示第2虚拟小船的艏摇角速度、ψ
d2
表示第2虚拟小船的艏向角。
[0058]
优选地,所述根据本船的当前姿态以及第二虚拟小船的当前姿态,计算本船的制导信号是根据公式(8)、(9)计算,
[0059][0060][0061]
ψr表示制导信号,ψ
d2
表示第2虚拟小船的艏向角,xe表示第2虚拟小船和本船之间的横坐标误差,ye表示第2虚拟小船和本船之间的纵坐标误差,ze表示第2虚拟小船和本船之间的位置误差,ψe表示本船和制导信号的艏向角误差。
[0062]
优选地,所述步骤2d包括根据公式(10)设计虚拟控制律αu,αr,用于调整误差项ze,ψe,
[0063][0064]
其中,αu表示前进速度虚拟控制律、αr表示艏摇角速度虚拟控制律、表示虚拟控制律αu的大于零的虚拟控制律参数;表示虚拟控制律αr的大于零的虚拟控制律参数;δ
δ
表示正的小量参数,用来保证本船始终跟随在第二虚拟小船之后,ze表示位置误差,表示第2虚拟小船的位置坐标的横坐标的一阶微分、表示第2虚拟小船的位置坐标的纵坐标的一阶微分、v表示本船横荡速度、ψe表示艏向角误差;
[0065]
根据动态面控制技术将公式(10)更新为公式(11),
[0066][0067][0068]
其中,
òu为大于零的前进速度动态面控制dsc时间常数,
òr为大于零的艏摇角速度动态面控制dsc时间常数,表示针对虚拟控制律αu设计的前进速度动态面控制dsc一阶滤波器,表示针对虚拟控制律αr设计的艏摇角速度动态面控制dsc一阶滤波器、αu表示前进速度虚拟控制律、αr表示艏摇角速度虚拟控制律。
[0069]
优选地,所述步骤2e具体包括,
[0070]
令控制输入信号t
uj
=|n|n,t
rj
=δ,根据公式(12)设计事件触发机制,
[0071][0072]
其中,表示本次触发开始时刻,表示下次触发开始时刻,表示中间连
续控制律,t
ij
(t)表示在t时刻的控制律,t表示时刻,i=u,r,
[0073]
根据公式(13)设计事件触发条件:
[0074][0075]
其中,表示中间连续控制律,表示事件触发机制的计算误差,c
i1
表示小量正数,c
i1
与阈值相关;c
i2
表示大于零参数,当输入误差e
ij
(t)被触发,则输入至控制器的参数在出发间隔内保持不变,
[0076]
根据公式(14)计算事件触发控制输入t
ij
(t):
[0077][0078]
其中,表示[-1,1]之间的设计参数,表示[-1,1]之间的设计参数,t
ij
(t)表示在t时刻的事件触发控制律。
[0079]
优选地,所述步骤2f具体包括,
[0080]
定义本船前进速度、本船艏摇角速度的误差动态和re=β
r-r,对本船前进速度、本船艏摇角速度的误差动态根据公式(15)对其求导:
[0081][0082][0083]
其中,表示本船前进速度的一阶导数,表示本船艏摇角速度的一阶导数,mu表示本船前进速度的位置模型参数,mr表示本船艏摇角速度的位置模型参数,表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器的一阶导数,表示针对虚拟控制律αr设计的艏摇角速度dsc一阶滤波器的一阶导数、mv表示本船横荡速度的位置模型参数,fu(v)表示本船前进速度的非线性函数,u表示本船前进速度,v表示本船横荡速度,r表示本船艏摇角速度,fr(v)表示本船艏摇角速度的非线性函数,通过神经网络对fu(v)和fr(v)做逼近处理,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,t
uj
表示控制输入|n|n,t
rj
表示控制输入δ,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰;
[0084]
根据公式(16)构建了鲁棒神经阻尼项,
[0085][0086][0087]
其中,
[0088][0089][0090]
ζu(v)=v2/4+r2,
[0091]
ζr(v)=v2/4+u2,
[0092]
ξu表示前进运动方向上中间变量,s(v)表示高斯函数,au表示前进运动方向上神经网络权重矩阵,βv表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器,mv表示本船横荡速度的位置模型参数,vr表示艏摇运动方向上类干扰误差,εu表示前进运动方向上神经网络逼近误差,du表示前进运动方向上类干扰误差的最大,表示前进运动方向上神经网络逼近误差的上界,θu表示前进运动方向上正的鲁棒上界参数,表示前进运动方向上鲁棒神经阻尼项,θr表示艏摇运动方向上正的鲁棒上界参数,表示艏摇运动方向上鲁棒神经阻尼项,ξr表示艏摇运动方向上中间变量,
[0093]
基于鲁棒神经阻尼项将误差动态更新为公式(17),
[0094][0095][0096]
其中,mu示本船前进速度的位置模型参数,mr表示本船艏摇角速度的位置模型参数,表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器,表示针对虚拟控制律αr设计的艏摇角速度dsc一阶滤波器,bu表示前进运动方向上神经网络权重矩阵au的范数,br表示艏摇运动方向上神经网络权重矩阵ar的范数,ωu表示前进运动方向上神经网络权重矩阵au的单位矩阵,ωr表示艏摇运动方向上神经网络权重矩阵ar的单位矩阵,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,
[0097]
定义变量和作为和的估计值,根据公式(18)定义变量du和dr,
[0098][0099][0100]
其中,du表示前进运动方向上的符合扰动项的最大值,dr表示艏摇运动方向上的符合扰动项的最大值,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角
速度的未知控制增益函数,表示本次触发开始时刻,表示下次触发开始时刻,表示[-1,1]之间的设计参数,表示[-1,1]之间的设计参数,c
i1
为小量正数;c
i2
为大于零的参数,i=u,r;
[0101]
根据主机转速和舵角,通过公式(19)获得鲁棒自适应神经控制律和通过公式(20)获得增益相关自适应律,根据鲁棒自适应神经控制律、增益相关自适应律控制本船跟踪参考信号航行,
[0102][0103][0104][0105][0106][0107][0108][0109][0110][0111]
其中,n表示本船的主机转速,表示du的估计值,ε
du
表示控制律中的双曲正切函数的相关参数,表示dr的估计值,ε
dr
表示控制律中的双曲正切函数的相关参数,ku表示控制律α
uj
中误差相关正的参数,k
un
表示控制律α
uj
中阻尼项相关正的参数,kr表示控制律α
rj
中误差相关正的参数、k
rn
表示控制律α
rj
中阻尼项相关正的参数、表示控制律中的增益相关自适应律,表示控制律中的增益相关自适应律,表示控制律中的复合扰动相关自适应律,表示控制律中的复合扰动相关自适应律,yu表示自适应律的的设计参数,yr表示自适应律的的设计参数,y
du
表示自适应律的的设计参数,y
dr
表示自适应律的的设计参数,σu表示小量设计参数,σr表示小量设计参数,σ
du
表示小量设计参数,σ
dr
表示小量设计参数,ue表示第2虚拟小船和本船之间的速度误差,re表示第2虚拟小船和
本船之间的艏摇角速度误差。
[0112]
本发明提供一种考虑障碍船危险行为的船舶动态避障制导与控制方法,具有以下两个有益效果:
[0113]
1、能够同时保证船舶的全局路径跟踪和局部避障规划功能,并且对于移动障碍船舶可以有效的产生避障信号,且避障行为符合国际海上避碰规则,与现有技术相比,计算简便,实时性强,同时具有补偿障碍船舶危险行为的功能,避障方法具有较强反应性。
[0114]
2、本发明的鲁棒自适应事件触发控制系统能够分别控制主机和螺旋桨伺服系统,能够将控制输入离散化并收敛到有限的集合内,同时保证了控制效果,可以有效减少船舶通信负载,在一定程度上节约计算机资源。
附图说明
[0115]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0116]
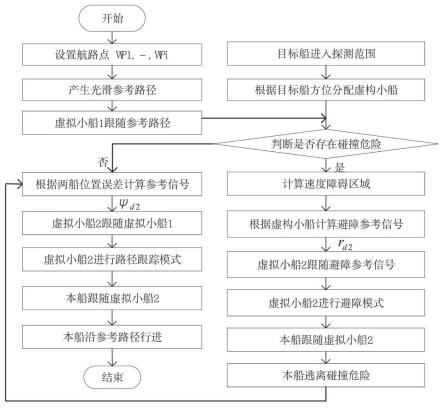
图1是本发明方法流程图;
[0117]
图2是本发明lvs制导算法的结构原理图;
[0118]
图3是本发明lpvs制导方法的结构原理图;
[0119]
图4是本发明局部避障信号原理图;
[0120]
图5是本发明控制系统逻辑结构图;
[0121]
图6是5级海况下风场和波面视图;
[0122]
图7是航海实践条件下船舶路径跟踪轨迹;
[0123]
图8是控制命令和实际输入对比图;
[0124]
图9是本发明自适应参数和变化曲线图;
[0125]
图10是本发明自适应参数du和dr变化曲线图;
[0126]
图11是本发明触发时间间隔分析图。
具体实施方式
[0127]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0128]
图1为本发明方法流程图,如图1所示,本实施例的方法可以包括:
[0129]
一种考虑障碍船危险行为的船舶动态避障制导与控制方法,包括以下步骤:
[0130]
步骤1、建立第一虚拟小船(虚拟小船1)、第二虚拟小船(虚拟小船2)、虚构小船、本船数学模型;根据航路点产生全局参考路径,第一虚拟小船基于全局参考路径航行。
[0131]
本实施例首先给出一种基于逻辑虚拟小船(logical virtual ship,lvs)的船舶控制器设计算法,其欠驱动船舶数学模型如式(1)所示。
[0132][0133][0134]
其中,(x,y,ψ)表示船舶的位置坐标和艏向角,u,v,r分别表示前向速度、横漂速度和艏摇角速度。模型参数mu,mv,mr表示三个自由度的附加质量,d
wi
,i=u,v,r用为外界环境的干扰力和力矩。fu(v),fv(v),fr(v)分别表示模型中的非线性项,tu,tr分别表示纵向推力和转船力矩。
[0135]
lvs制导算法的原理是根据船舶当前位置与虚拟小船之间的位置偏差来解算出船舶参考航向,lvs制导算法的结构原理图如图2所示。通过图2可以解算出船舶的参考航向信号ψr,如式(2)所示。
[0136][0137]
通过设计控制器来镇定tu,tr,如式(3)所示,令本船跟踪上虚拟小船,进行路径跟踪航行任务。
[0138][0139][0140]
本实施例在lvs基础上设计了一种逻辑虚构-虚拟小船(logical phantom virtual ship,lpvs)制导与鲁棒自适应事件触发方法,lpvs制导方法的结构原理图如图3所示,首先根据公式(4)建立第一虚拟小船、第二虚拟小船数学模型,通过公式(5)建立虚构小船数学模型,根据公式(6)建立本船数学模型,
[0141][0142][0143][0144]
其中,(u
dl
,r
dl
)为第i虚拟小船的速度和角速度;r
p
表示船舶领域半径,c
p
表示虚构
小船与第二虚拟小船之间的角度;x
dl
为第l虚拟小船的位置坐标的横坐标,y
dl
为第l虚拟小船的位置坐标的纵坐标,ψ
dl
为第l虚拟小船的艏向角;i=1,2;为第l虚拟小船的位置坐标的横坐标的一阶微分、为第l虚拟小船的位置坐标的纵坐标的一阶微分、为第l虚拟小船的艏向角的一阶微分、θ
p
为虚构小船的位置坐标的艏向角、y
p
为虚构小船的位置坐标的纵坐标、x
p
为虚构小船的位置坐标的横坐标、x
d2
第二虚拟小船的位置坐标的横坐标、y
d2
第二虚拟小船的位置坐标的纵坐标、ψ
d2
为第二虚拟小船的艏向角;u表示本船前进速度,ν表示本船横荡速度,r表示本船艏摇角速度,x表示惯性坐标系下本船的船舶位置的横坐标,y表示惯性坐标系下本船的船舶位置的纵坐标,ψ表示惯性坐标系下本船的船舶位置的艏摇角;表示惯性坐标系下本船的船舶位置的横坐标的一阶微分、表示惯性坐标系下本船的船舶位置的纵坐标的一阶微分、表示惯性坐标系下本船的船舶位置的艏摇角的一阶微分。
[0145]
所述根据航路点产生全局参考路径,第一虚拟小船基于全局参考路径航行包括设置航路点wp1,—,wpi,根据航路点产生光滑参考路径,第一虚拟小船跟随参考路径航行,
[0146]
步骤2、设置虚构小船的探测范围,虚构小船的探测范围是指rv,ro,ri的总和,其中rv表示船舶转向过程的补偿值,ro表示障碍船危险行为的补偿值,ri表示不同规格障碍船的安全范围。
[0147]
通过gps传感器获取障碍船的位置信息,即目标船进入探测范围,根据目标船方位分配虚构小船,计算障碍船与本船之间的空间距离,根据探测范围与所述空间距离的大小关系判断本船与障碍船是否存在碰撞危险,
[0148]
当空间距离大于探测范围时,表示不存在碰撞危险,则第二虚拟小船跟随第一虚拟小船航行,本船跟随第二虚拟小船航行;
[0149]
所述第二虚拟小船跟随第一虚拟小船航行是指基于第一虚拟小船与第二虚拟小船位置信息,计算跟随参考信号,第二虚拟小船根据跟随参考信号跟随第一虚拟小船,第二虚拟小船进行路径跟踪模式,本船跟随第二虚拟小船,本船沿参考路径行进;
[0150]
当空间距离小于等于探测范围时,表示存在碰撞危险,则基于速度障碍法原理计算速度障碍区域,根据虚构小船位置信息计算避障参考信号,第二虚拟小船跟随避障参考信号基于避障模式进行避障,其局部避障信号原理图如图4所示,本船跟随第二虚拟小船航行,当本船逃离碰撞危险,则根据不存在碰撞危险进行航行,根据公式(7)计算本船船舶位置的艏摇角,以本船船舶位置的艏摇角作为避障参考信号,
[0151][0152]
其中,v
r0
表示期望的本船和障碍船之间相对速度;vo表示障碍船船速;ψo表示障碍船的航向;v表示本船船速;ψ表示本船船舶位置的艏摇角。
[0153]
所述本船跟随第二虚拟小船航行是指基于本船与第二虚拟小船的位置关系,计算本船参考航向信息,本船控制系统根据本船参考航向信息、本船当前船舶姿态信息控制本船航行,控制系统的逻辑结构图如图5所示。
[0154]
本船控制系统根据本船参考航向信息、本船当前船舶姿态信息控制本船航行包括,
[0155]
步骤2a、建立本船的欠驱动船舶运动学数学模型,根据第二虚拟小船计算本船的
参考轨迹,具体包括,
[0156]
建立本船的欠驱动船舶运动学数学模型是指根据公式(8)建立本船的数学模型,
[0157][0158]
其中,n表示本船的主机转速,δ表示本船的舵角,fu(v)表示本船前进速度的非线性函数,fr(v)表示本船横荡速度的非线性函数,fr(v)表示本船艏摇角速度的非线性函数,fu(v),fv(v),fr(v)用于描述高阶流体动力影响,d
wu
表示本船前进速度的外界海洋环境干扰,d
wv
表示本船横荡速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,mu表示本船前进速度的位置模型参数,mv表示本船横荡速度的位置模型参数,mr表示本船艏摇角速度的位置模型参数,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,u表示本船前进速度,v表示本船横荡速度,表示本船前进速度的一阶微分、表示本船横荡速度的一阶微分、表示本船艏摇角速度的一阶微分,tu(
·
),fr(
·
)根据公式(9)表示未知控制增益函数,
[0159][0160]
其中,ρw表示海水密度;d
p
表示螺旋桨的直径;j
p
表示螺旋桨的进速系数;k
t
表示螺旋桨推力系数;t
p
表示作用在船体水动力干涉程度;αh表示作用在舵上的力矩之间的干涉程度;xr表示舵叶的x坐标轴上的坐标;xh表示船舶重心的x坐标轴上的坐标;ar表示舵的面积;λr表示舵的纵横比;表示船舶前进速度,n表示本船的主机转速,δ表示本船的舵角;
[0161]
所述根据第二虚拟小船计算本船的参考轨迹是根据公式(10)计算本船的参考轨迹,
[0162][0163]
其中,表示第2虚拟小船的位置坐标的横坐标的一阶微分、表示第2虚拟小船的位置坐标的纵坐标的一阶微分、表示第2虚拟小船的艏向角的一阶微分、u
d2
表示第2虚拟小船的前进速度、r
d2
表示第2虚拟小船的艏摇角速度、ψ
d2
表示第2虚拟小船的艏向角。
[0164]
步骤2b、根据本船的当前姿态以及第二虚拟小船的当前姿态,计算本船的制导信号,所述制导信号为参考航向角信号,具体是根据公式(11)、(12)计算,
[0165][0166][0167]
ψr表示制导信号,ψ
d2
表示第2虚拟小船的艏向角,xe表示第2虚拟小船和本船之间的横坐标误差,ye表示第2虚拟小船和本船之间的纵坐标误差,ze表示第2虚拟小船和本船之间的位置误差,ψe表示本船和制导信号的艏向角误差。
[0168]
步骤2c、根据制导原理图,通过几何关系得到横纵坐标误差、位置和艏向角误差项;计算位置和艏向角误差项的导数;
[0169]
xe=zecosψr,ye=zesinψrꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0170]
其中,ye表示纵坐标误差,ze表示位置误差,
[0171]
步骤2d、通过前进速度虚拟控制律、艏摇角速度虚拟控制律镇定位置和艏向角误差项,基于动态面控制技术对前进速度虚拟控制律、艏摇角速度虚拟控制律进行求导,具体包括根据公式(14)设计虚拟控制律αu,αr,用于镇定定误差项ze,ψe,
[0172][0173]
其中,αu表示前进速度虚拟控制律、αr表示艏摇角速度虚拟控制律、表示虚拟控制律αu的大于零的虚拟控制律参数;表示虚拟控制律αr的大于零的虚拟控制律参数;δ
δ
表示正的小量参数,用来保证本船始终跟随在第二虚拟小船之后,αu表示前进速度虚拟控制律、αr表示艏摇角速度虚拟控制律、ze表示位置误差,表示第2虚拟小船的位置坐标的横坐标的一阶微分、表示第2虚拟小船的位置坐标的纵坐标的一阶微分、v表示本船横荡速度、ψe表示艏向角误差。
[0174]
由于backstepping法本身的限制,在下一步的推导需要对虚拟控制律和进行求导,由于虚拟空置率本身已经形式复杂,若进行求导会极大增加计算量和控制律复杂程度,会引起“计算爆炸”问题,这也会使得控制律难以在实际工程中应用。因此引入动态面控制技术(dsc)以为了避免这个问题的发生。根据动态面控制技术将公式(14)更新为公式(15),
[0175][0176][0177]
其中,
òu为大于零的前进速度动态面控制dsc时间常数,
òr为大于零的艏摇角速度
动态面控制dsc时间常数,表示针对虚拟控制律αu设计的前进速度动态面控制dsc一阶滤波器,表示针对虚拟控制律αr设计的艏摇角速度动态面控制dsc一阶滤波器、αu表示前进速度虚拟控制律、αr表示艏摇角速度虚拟控制律。
[0178]
为了将控制输入离散化并限制到有限集中,减小通信负载,受到基于输入端事件触发的启发,本发明针对输入误差进行事件触发设计,具体为步骤2e、根据事件触发机制将输入至控制器的参数离散化并限制在有限集合中,包括,
[0179]
令控制输入t
uj
=|n|n,t
rj
=δ,根据公式(16)设计事件触发机制,
[0180][0181]
其中,表示本次触发开始时刻,表示下次触发开始时刻,表示中间连续控制律,t
ij
(t)表示在t时刻的控制律,t表示时刻,i=u,r,
[0182]
根据公式(17)设计事件触发条件:
[0183][0184]
其中,表示中间连续控制律,表示事件触发机制的计算误差,c
i1
表示小量正数,c
i1
与阈值相关;c
i2
表示大于零参数,当输入误差e
ij
(t)被触发,则输入至控制器的参数在出发间隔内保持不变,根据公式(18)计算事件触发控制输入t
ij
(t):
[0185][0186]
其中,表示[-1,1]之间的设计参数,表示[-1,1]之间的设计参数,t
ij
(t)表示在t时刻的事件触发控制律。
[0187]
所述步骤2f、定义误差动态并构建鲁棒神经阻尼项,对误差动态求导;定义变量du和dr,du表示前进运动方向上的符合扰动项的最大值,dr表示艏摇运动方向上的符合扰动项的最大值;设计鲁棒自适应神经控制律和增益相关自适应律,根据鲁棒自适应神经控制律、增益相关自适应律控制本船跟踪参考信号航行,具体包括,
[0188]
定义误差动态和re=β
r-r,根据公式(19)对其求导:
[0189][0190][0191]
其中,fu(v)和fr(v)通过神经网络做逼近处理,表示本船前进速度的一阶导数,表示本船艏摇角速度的一阶导数,mu表示本船前进速度的位置模型参数,mr表示本船艏摇角速度的位置模型参数,表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器的一阶
导数,表示针对虚拟控制律αr设计的艏摇角速度dsc一阶滤波器的一阶导数、mv表示本船横荡速度的位置模型参数,fu(v)表示本船前进速度的非线性函数,u表示本船前进速度,v表示本船横荡速度,r表示本船艏摇角速度,fr(v)表示本船艏摇角速度的非线性函数,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,t
uj
表示控制输入|n|n,t
rj
表示控制输入δ,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰;
[0192]
为了处理外界扰动及参数不确定,根据公式(20)构建了鲁棒神经阻尼项,
[0193][0194][0195]
其中,
[0196][0197][0198]
ζu(v)=v2/4+r2,
[0199]
ζr(v)=v2/4+u2,
[0200]
ξu表示前进运动方向上中间变量,s(v)表示高斯函数,au表示前进运动方向上神经网络权重矩阵,βv表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器,mv表示本船横荡速度的位置模型参数,vr表示艏摇运动方向上类干扰误差,εu表示前进运动方向上神经网络逼近误差,du表示前进运动方向上类干扰误差的最大,表示前进运动方向上神经网络逼近误差的上界,θu表示前进运动方向上正的鲁棒上界参数,表示前进运动方向上鲁棒神经阻尼项,θr表示艏摇运动方向上正的鲁棒上界参数,表示艏摇运动方向上鲁棒神经阻尼项,ξr表示艏摇运动方向上中间变量,
[0201]
基于鲁棒神经阻尼项将误差动态更新为公式(21),
[0202][0203][0204]
其中,mu示本船前进速度的位置模型参数,me表示本船艏摇角速度的位置模型参数,表示针对虚拟控制律αu设计的前进速度dsc一阶滤波器,表示针对虚拟控制律αr设计的艏摇角速度dsc一阶滤波器,bu表示前进运动方向上神经网络权重矩阵au的范数,br表示艏摇运动方向上神经网络权重矩阵ar的范数,ωu表示前进运动方向上神经网络权重矩
阵au的单位矩阵,ωr表示艏摇运动方向上神经网络权重矩阵ar的单位矩阵,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,
[0205]
为了处理闭环系统的增益不确定问题,定义变量和作为和的估计值,根据公式(22)定义变量du和dr,
[0206][0207][0208]
其中,du表示前进运动方向上的符合扰动项的最大值,dr表示艏摇运动方向上的符合扰动项的最大值,d
wu
表示本船前进速度的外界海洋环境干扰,d
wr
表示本船艏摇角速度的外界海洋环境干扰,tu(
·
)表示本船前进速度的未知控制增益函数,fr(
·
)表示本船艏摇角速度的未知控制增益函数,
[0209]
根据主机转速和舵角,通过公式(23)获得鲁棒自适应神经控制律和通过公式(24)获得增益相关自适应律,根据鲁棒自适应神经控制律、增益相关自适应律控制本船跟踪参考信号航行,
[0210][0211][0212][0213][0214][0215][0216][0217][0218]
[0219]
其中,n表示本船的主机转速,表示du的估计值,ε
du
表示控制律中的双曲正切函数的相关参数,表示dr的估计值,ε
dr
表示控制律中的双曲正切函数的相关参数,ku表示控制律α
uj
中误差相关正的参数,k
un
表示控制律α
uj
中阻尼项相关正的参数,kr表示控制律α
rj
中误差相关正的参数、k
rn
表示控制律α
rj
中阻尼项相关正的参数、表示控制律中的增益相关自适应律,表示控制律中的增益相关自适应律,表示控制律中的复合扰动相关自适应律,表示控制律中的复合扰动相关自适应律,yu表示自适应律的的设计参数,yr表示自适应律的的设计参数,y
du
表示自适应律的的设计参数,y
dr
表示自适应律的的设计参数,σu表示小量设计参数,σr表示小量设计参数,σ
du
表示小量设计参数,σ
dr
表示小量设计参数,ue表示第2虚拟小船和本船之间的速度误差,re表示第2虚拟小船和本船之间的艏摇角速度误差。
[0220]
为了验证本发明所提出控制方法在计算负载和鲁棒性方面的优势,以文献[6]中使用的欠驱动船舶(船长38米,质量11810kg)为被控对象,将本发明所提出的控制方法在matlab仿真平台上进行数值试验。本部分选取四个航路点w1(0m,0m),w2(0m,2080m),w3(9603965m),w4(3340m,3965m)构成航路点路径,路径由三段路径组成,在这三段路径中本船分别遭遇右交叉、前对遇以及前追越三种会遇局面,通过仿真试验验证本发明方法的有效性。
[0221]
被控对象的初始状态为:
[0222]
[x(0),y(0),ψ(0),u(0),v(0),r(0),n(0),δ(0)]=[0m,-l0m,0deg,2m/s,0m/s,0m/s,0m/s,300rpm,0deg]。
[0223]
为了使外界扰动更加符合实际海洋环境,本发明引入了机理扰动模型,使用norsok风谱和jonswap波浪谱模拟海洋环境。图6表示5级海况下海面风速、风向曲线以及风浪三维视图。图7-图10表示在模拟海洋环境下试验的仿真结果。图7描述了在本发明制导与控制方法的作用下,本船行驶的路径效果图,包括障碍船舶行驶路径和本船行驶路径。从图7可以看出,即便在两船会遇过程中,动态障碍船舶采取了危险操作,本船仍能够进行有效的避障,并且在完成避障后,返回参考路径。图8表示在本发明所提控制方法的作用下产生的控制命令和受伺服系统作用的实际控制输入,从图8可以看出,本发明产生的控制命令呈现阶梯状,被离散化为一段段常值,这样避免了控制命令的抖震现象,保护力通信信道资源,并且减少了执行器的过度磨损。图9-10是本发明所提控制方法自适应参数变化曲线。图11为在本发明所提控制方法中螺旋桨和舵的触发点以及触发时间间隔。
[0224]
整体的有益效果:1)本发明的制导方法能够同时保证船舶的全局路径跟踪和局部避障规划功能,并且对于移动障碍船舶可以有效的产生避障信号,且避障行为符合国际海上避碰规则,与现有技术相比,计算简便,实时性强,同时具有补偿障碍船舶危险行为的功能,避障方法具有较强反应性。
[0225]
2)本发明的鲁棒自适应事件触发控制方法能够分别控制主机和螺旋桨伺服系统。与现有控制算法相比,本发明所提控制方法能够将控制输入离散化并收敛到有限的集合
内,同时保证了控制效果,这可以有效减少船舶通信负载,在一定程度上节约计算机资源。
[0226]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1