一种分选设备下料流量闭环控制方法与流程
1.本发明属于分选设备领域,涉及分选设备下料流量控制技术,具体是一种分选设备下料流量闭环控制方法。
背景技术:
2.随着农业科技的发展和人民生活水平的提高,人们对粮食水果的品质有了更高的要求。为了提高粮食、水果的质量和出品等级,需要对粮食、水果进行严格地质量分级;为了提高分选效率和产量,对下料分选的流量稳定性控制提出更高的要求。
3.为此,提出一种分选设备下料流量闭环控制方法。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种分选设备下料流量闭环控制方法,该一种分选设备下料流量闭环控制方法解决了现有技术中为了提高粮食、水果的质量和出品等级,需要对粮食、水果进行严格地质量分级;为了提高分选效率和产量,对下料分选的流量稳定性控制提出更高的要求的技术问题;本发明能够快速响应,精确控制每个通道的下料量,保证多通道下料的一致性,提高下料产量,以解决上述问题。
5.为实现上述目的,根据本发明的第一方面的实施例提出一种分选设备下料流量闭环控制方法,具体方法包括以下步骤:
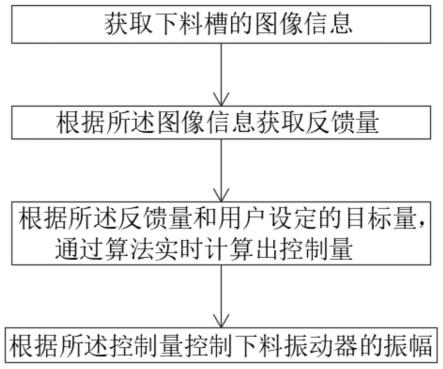
6.步骤一:获取下料槽的图像信息;
7.步骤二:根据所述图像信息获取反馈量;
8.步骤三:根据所述反馈量和用户设定的目标值,通过算法实时计算出控制量;
9.步骤四:根据所述控制量控制下料振动器的振幅。
10.优选的,所述图像信息通过相机获取。
11.优选的,根据所述图像信息获取反馈量,具体过程包括:
12.将物料所占像素点标记为w
t
,相机视域中像素点标记为x,其中,t表示控制周期,t的取值为1,2,3
……
n;
13.物料所占像素点w
t
与相机视域中像素点x的比值作为反馈量,所述反馈量标记为f
t。
14.优选的,根据所述反馈量和用户设定的目标值,通过算法实时计算出控制量,具体过程包括:
15.将用户设定的下料量定义为目标值,所述目标值标记为d
t
;
16.当所述反馈量不等于用户设定的所述目标值时,根据所述反馈量和所述目标值进行差值比较得到误差值,所述误差值标记为e
t
;
17.将误差值e
t
保存;
18.进入下一个控制周期时,得到新的误差值e
t+1
;
19.下一个控制周期得到的新的误差值与上个周期得到的误差值相减得到误差增量,所述误差增量标记为er
t+1
,
20.将所述误差增量er
t+1
和所述误差值e
t+1
代入计算公式得到控制量,所述控制量标记为p
t+1
;
21.优选的,将所述控制周期的默认值设定为1s,根据用户设定的所述目标值的大小进行适当的调整,当所述目标值小于百分之二十时,所述控制周期设定为2s;
22.当所述目标值大于百分之八十时,所述控制周期设定为0.5s。
23.优选的,所述反馈量的计算公式为:f
t
=w
t
/x;
24.所述误差值的计算公式为:e
t
=d
t-f
t
;
25.所述误差增量的计算公式为:er
t+1
=e
t+1-e
t
;
26.所述控制量p
t+1
的计算公式为:p
t+1
=a(b*e
t+1
+c*er
t+1
)。
27.优选的,系数的确定方法:首先将a设置为1,c设置为0,将系数b由小到大的变化,观察系统响应,直到速度快,且有一定范围的超调为止;
28.如果系统静差在规定范围之内,且响应已满足设计要求,那么系数设定完毕;
29.如果系统静差达不到要求,这时将c由小逐渐增加。积分逐渐增强,观察输出会发现,系统静差逐渐减少直至消除,系数设定完成。
30.优选的,所述下料振动器的下料响应时间不得高于0.5s。
31.优选的,本发明包括数据采集模块、控制模块以及执行模块;
32.所述数据采集模块用于根据相机采集到的光信号生成图像信息,并将所述图像信息发送至所述控制模块;
33.所述控制模块用于根据所述图像信息获取下料量,并根据用户设定的目标值通过算法实时计算出控制量;
34.所述执行模块用于接收所述控制量,并根据所述控制量控制下料振动器的振幅,决定下料的多少。
35.与现有技术相比,本发明的有益效果是:
36.本发明根据图像信息获取反馈量,根据反馈量与用户设定的目标值之间的差值得到误差值,并保存误差值,下一个控制周期得到的新的误差值与上个周期得到的误差值相减得到误差增量,根据误差值和误差增量进行计算得到控制量控制下料振动器,从而改变下料量大小,消除误差,该方法能够快速响应,精确控制每个通道的下料量,保证多通道下料的一致性,提高下料产量。
附图说明
37.图1为本发明的流程图。
具体实施方式
38.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.如图1所示,一种分选设备下料流量闭环控制方法,具体方法包括以下步骤:
40.步骤一:获取下料槽的图像信息;
41.步骤二:根据所述图像信息获取反馈量;
42.步骤三:根据所述反馈量和用户设定的目标值,通过算法实时计算出控制量;
43.步骤四:根据所述控制量控制下料振动器的振幅。
44.该方法能够快速响应,精确控制每个通道的下料量,保证多通道下料的一致性,提高下料产量。
45.本实施例中,所述图像信息通过相机获取,所述图像信息的内容清晰,保证物料能够准确识别,确保反馈量实时且准确。
46.根据所述图像信息获取反馈量,具体过程包括:
47.将物料所占像素点标记为w
t
,相机视域中像素点标记为x,其中,t表示控制周期,t的取值为1,2,3
……
n;需要特别注意的是,像素是指由图像的小方格组成的,这些小方块都有一个明确的位置和被分配的色彩数值,小方格颜色和位置就决定该图像所呈现出来的样子,可以将像素视为整个图像中不可分割的单位或者是元素,不可分割的意思是它不能够再切割成更小单位抑或是元素,它是以一个单一颜色的小格存在,每一个点阵图像包含了一定量的像素,这些像素决定图像在屏幕上所呈现的大小。
48.物料所占像素点w
t
与相机视域中像素点x的比值作为反馈量,所述反馈量标记为f
t
;
49.所述反馈量的计算公式为:f
t
=w
t
/x。
50.根据所述反馈量和用户设定的目标值,通过算法实时计算出控制量,具体过程包括:
51.将用户设定的下料量定义为目标值,所述目标值标记为d
t
;
52.当所述反馈量不等于用户设定的所述目标值时,根据所述反馈量和所述目标值进行差值比较得到误差值,所述误差值标记为e
t
;
53.所述误差值的计算公式为:e
t
=d
t-f
t
;
54.将误差值e
t
保存;
55.进入下一个控制周期时,得到新的误差值e
t+1
;需要特别注意的是,将所述控制周期的默认值设定为1s,根据用户设定的所述目标值的大小进行适当的调整,当所述目标值小于百分之二十时,所述控制周期设定为2s;
56.当所述目标值大于百分之八十时,所述控制周期设定为0.5s。
57.举例说明:
58.当用户设定的目标值为70%时,控制周期设定为1s;
59.当用户设定的目标值为10%时,控制周期设定为2s;
60.当用户设定的目标值为90%时,控制周期设定为0.5s。
61.下一个控制周期得到的新的误差值与上个周期得到的误差值相减得到误差增量,所述误差增量标记为er
t+1
,
62.所述误差增量的计算公式为:er
t+1
=e
t+1-e
t
;
63.将所述误差增量er
t+1
和所述误差值e
t+1
代入计算公式得到控制量,所述控制量标记为p
t+1
;
64.计算所述控制量p
t+1
的计算公式为:
65.p
t+1
=a(b*e
t+1
+c*er
t+1
)。
66.根据图像信息获取反馈量,根据反馈量与用户设定的目标值之间的差值得到误差值,并保存误差值,下一个控制周期得到的新的误差值与上个周期得到的误差值相减得到误差增量,根据误差值和误差增量进行计算得到控制量控制下料振动器的振幅,从而改变下料量大小,消除误差。
67.需要特别注意的是,根据所述控制量的计算需要调整系数a、b,得到的结果要做范围限制,避免值过大从而影响振动器的稳定性;
68.一般情况下,增大系数b会加快响应速度,有利于减少静差,但过大的系数b会使系统有较大的超调,并产生振荡使得稳定性变差;
69.减小系数c将减少系统的积分作用,有利于减少超调是系统稳定,但系统消除静差的速断慢;
70.系数a是由误差转换为振动器控制量的转换系数,一般设置为1。
71.本实施例中,系数的确定方法:首先将a设置为1,c设置为0,将系数b由小到大的变化,观察系统响应,直到速度快,且有一定范围的超调为止;
72.如果系统静差在规定范围之内,且响应已满足设计要求,那么系数设定完毕;
73.如果系统静差达不到要求,这时将c由小逐渐增加。积分逐渐增强,观察输出会发现,系统静差逐渐减少直至消除,系数设定完成。
74.本实施例中,所述下料振动器的下料响应时间不得高于0.5s。
75.需要特别注意的是,本发明包括数据采集模块、控制模块以及执行模块;
76.所述数据采集模块用于根据相机采集到的光信号生成图像信息,并将所述图像信息发送至所述控制模块;
77.所述控制模块用于根据所述图像信息获取下料量,并根据用户设定的目标值通过算法实时计算出控制量;
78.所述执行模块用于接收所述控制量,并根据所述控制量控制下料振动器的振幅,决定下料的多少。
79.上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
80.本发明的工作原理:
81.获取下料槽的图像信息,根据图像信息获取反馈量,根据反馈量与用户设定的目标值之间的差值得到误差值,并保存误差值,下一个控制周期得到的新的误差值与上个周期得到的误差值相减得到误差增量,根据误差值和误差增量进行计算得到控制量控制下料振动器的振幅,从而改变下料量大小,消除误差。
82.以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1