一种基于超声波测距的单片机及继电器控制中控锁的下车防摔避险系统及方法
1.本发明涉及一种基于超声波测距的单片机及继电器控制中控锁的下车防摔避险系统的方法,属于车辆安全领域。
背景技术:
2.根据收集总结的车辆出行过程中发生安全隐患的各类新闻,我们了解到因存在路况不明、地面不平、道路坑洼等道路问题,导致人员从车辆下车途中出现摔伤的现象时有发生。且现在于车辆日常使用的测距技术,仅着眼于倒车实时测距等针对车辆行驶或车辆停泊过程中对驾驶员的操作辅助,并未完全考虑到车中人员下车时存在未及时注意地面情况而因深坑或凸坡导致绊倒、扭伤的风险。因此,车辆出行中迫切需要一种针对汽车停泊处地面情况,并可依据情况自动做出应急反应的下车防摔避险系统,进而扩宽车辆出行时对人员的安全保障范围。
3.目前,市面上车辆日常出行的测距技术应用情况仍存在不足,不能切实解决下车的防摔避险问题。例如cn201420763744.4一种车辆开门预警装置,该装置运用超声波测距传感器、蜂鸣器和led灯与单片机相连接,可获知车门与车门外侧障碍物间的距离是否属于安全距离,因而可实现对车内驾驶员和乘坐人员进行开门下车的操作予以安全警示,但这种预警装置仅对周边与车门处某一平面障碍物的情况进行考虑,分析范围片面,不具备测量地面情况与相对水平面高度差的条件,无法保障人员下车过程中的安全;又例如cn202021330204.9一种车辆开门时的安全示警系统,该系统运用位于车辆上的超声波测距测速模块对车辆四周进行监测,在有车辆或行人通过车辆附近时,警示单元能够对驾驶员起到提醒作用,使驾驶员能够观察车辆四周情况再进行开启车辆,但这种示警系统仅针对车辆启动过程中对驾驶员做出提醒,并未考虑到人员下车时对地面状况的安全性判断。
4.本发明设计了一种基于超声波测距的单片机及继电器控制中控锁的下车防摔避险系统的方法,系统运用单片机与继电器的结合控制,车辆车门的中控锁控制电路与继电器协同运行,受单片机的集中控制,确保系统工作时间迅速;系统将超声波传感器搭配半步驱动式的pm型步进电机进行测量范围的转换,按需扩大测量范围及提高数据精度,使单片机进行信号处理及数据分析得出的结果与实际更为贴切,即系统能准确判断车门落脚区域深(高)度相对周围水平高度是否达到造成人员因未注意落脚区域地面情况而造成易绊倒、扭脚的风险,并依此做出相应的规避措施及预警提示,更为全面地保障人们的出行安全。
技术实现要素:
5.本发明提供了一种基于超声波测距的单片机及继电器控制中控锁的下车防摔避险系统的方法,由单片机控制系统和中控锁避险控制系统两部分组成;
6.其中单片机控制系统由超声波发射与回波电路、转向电路、时钟电路、预警电路、自启动电路、自动与手动复位电路组成;超声波传感器21和pm型步进电机30外接,单片机9
的 gnd端口4接地;
7.其中超声波发射与回波电路由超声波传感器21、单片机9、脉冲变压器12、q2三极管 11、d1二极管20、d2二极管19、d3二极管15、d4二极管16、c3电容器22、r2电阻器10、 r3电阻器18、r4电阻器17、r5电阻器13、超声波放大与整形电路23、5v电源28、12v电源14组成;单片机p3.3端口2经过r2电阻器10、q2三极管11和脉冲变压器12连接,q2 三极管11发射极接地,脉冲变压器12右线圈经过r5电阻器13与12v电源14连接,脉冲变压器12左线圈分别通过并联的d3二极管15和d4二极管16、r3电阻器18、r4电阻器17、并联的d2二极管19和d1二极管20、c3电容器22,与超声波放大与整形电路23的in接口 24连接,超声波放大与整形电路23的out接口26与单片机p3.4端口3连接,超声波放大与整形电路23的vcc接口27连接5v电源28,超声波放大与整形电路23的gnd接口25接地;
8.其中转向电路由单片机9、pm型步进电机30组成;单片机p3.3端口2通过脉冲调制29 与pm型步进电机30连接;
9.其中时钟电路由单片机9、y1石英晶体振荡器31、c1微调电容器32、c2微调电容器33 组成;y1石英晶体振荡器31两端与单片机9的xtal2端口7和xtal1端口6跨接,c1微调电容器32、c2微调电容器33分别连接于y1石英晶体振荡器31两端,单片机9的xtal1端口6接地;
10.其中预警电路由单片机9、r1电阻器35、q1三极管36、mk1蜂鸣器38、5v电源37组成;单片机9的p3.7端口5通过r1电阻器35与q1三极管36基极连接,q1三极管36集电极与 mk1蜂鸣器38连接,q1三极管36发射极连接5v电源37,单片机9的p3.7端口5与a1电路接口34连接,mk1蜂鸣器38接地;
11.其中自启动电路由单片机9、spdt1单刀双掷开关39、k1继电器43、d5二极管44、q3 三极管46、r6电阻器47、5v电源45、5v电源49组成;单片机9的vcc端口8与spdt1单刀双掷开关39的动端40连接,spdt1单刀双掷开关39的不动端
②
41与5v电源49连接,spdt1 单刀双掷开关39的不动端
①
42接地,k1继电器43与d5二极管44并联并与q3三极管46集电极连接,d5二极管44负极与5v电源45连接,q3三极管46基极通过r6电阻器47与a2 电路接口48连接,q3三极管46发射极接地;
12.其中自动与手动复位电路由单片机9、c4电容器50、r13电阻器51、r7电阻器70、r8 电阻器67、r14电阻器100、spdt2单刀双掷开关52、spdt3单刀双掷开关56、k2继电器62、 d6二极管63、q4三极管65、q5三极管66、s1复位开关69、5v电源49、5v电源64、5v电源68组成;5v电源49通过c4电容器50与单片机9的rst端口1连接,r13电阻器51下端接地,c4电容器50左端与spdt2单刀双掷开关52的动端53连接,右端与spdt2单刀双掷开关52的不动端
①
55连接,spdt2单刀双掷开关52的不动端
②
54接地,spdt3单刀双掷开关56的动端57与a3电路接口61连接,不动端
②
58与a4电路接口60连接、不动端
①
59接地,spdt2单刀双掷开关52、spdt3单刀双掷开关56和k2继电器62连接,k2继电器62与 d6二极管63并联并与q4三极管65集电极连接,d6二极管63负极与5v电源64连接,q4 三极管65发射极接地,5v电源68通过s1复位开关69、r7电阻器70与q5三极管66基极连接,5v电源68与q5三极管66发射极连接,q5三极管66集电极通过r14电阻器100与 q4三极管65基极连接、通过r8电阻器67接地;
13.其中中控锁避险控制系统由门锁转向电路、避险转向控制电路组成;
14.其中门锁转向电路由直流电源71、spdt5单刀双掷开关76、spdt6单刀双掷开关73、
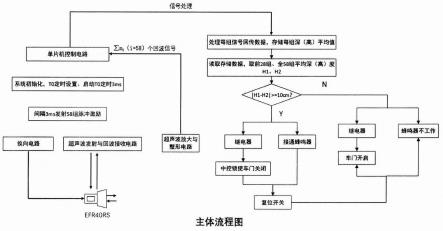
度数据h1、h2,若二者差的绝对值大于等于10cm,落脚区域处于相较于车辆所处水平面深(高) 度差较大,即认定为车门落脚区域地面情况有使人易绊倒的风险,单片机控制电路发出信号,连通声音报警电路及继电器控制的车辆中控锁电路,使蜂鸣器发出警报并锁紧车门;当人员已知晓落脚区域的隐患情况,可通过s1复位开关69控制继电器进而控制蜂鸣器警报关闭,开启车门。
23.运用了at89c2151单片机及继电器的配合控制。
24.当k1继电器43未通电时,spdt1单刀双掷开关39的动端40与不动端
②
42常闭并与不动端
①
41常开;k2继电器62未通电时,spdt2单刀双掷开关52的动端53与不动端
②
54常闭并与不动端
①
55常开,spdt3单刀双掷开关56的动端57与不动端
②
58常闭并与不动端
①ꢀ
59常开;k3继电器81未通电时,spdt5单刀双掷开关76的动端77与不动端
②
79常闭并与不动端
①
78常开,spdt6单刀双掷开关73的动端72与不动端
②
74常闭并与不动端
①
75常开; k4继电器95未通电时,spdt4单刀双掷开关86的动端89与不动端
②
88常闭并与不动端
①ꢀ
87常开;
25.当s2中控锁开关92闭合,5v电源91通过r9电阻器93、q6三极管90、r10电阻器94 组成的电平转换电路,于q6三极管90的集电极输出低电平,低电平分别输向a2电路接口 48及通过spdt4单刀双掷开关86、r11电阻器85输向q7三极管83基极,r11电阻器85为限流电阻,q7三极管83导通,k3继电器81通电,spdt5单刀双掷开关76的动端77与不动端
②
79立即断开并与不动端
①
78闭合,spdt6单刀双掷开关73的动端72与不动端
②
74立即断开并与不动端
①
75闭合,接于直流电动机80的正负极对调,直流电动机80上端接负极、下端接正极,直流电动机80转向,车门处开启状态;低电平由a2电路接口48通过r6电阻器47输向q3三极管46基极,r6电阻器47为限流电阻,q3三极管46导通,k1继电器43 通电,spdt1单刀双掷开关39的动端40与不动端
①
41立即闭合并与不动端
②
42断开,5v电源49与单片机vcc端口8导通,单片机开始工作;
26.单片机的p3.3端口2输出一串40khz的脉冲电压,输往超声波发射与回波电路及转向电路,同时t0定时器工作;在转向电路中,40khz脉冲电压经过脉冲调制29变成400hz,使 pm型步进电机30以半步驱动工作,p3.3端口每隔3ms发射一次脉冲,pm型步进电机30每 3ms转0.9
°
,即与pm型步进电机外接的超声波传感器21每3ms转换一次测量范围;在超声波发射与回波电路中,40khz脉冲电压经过r2电阻器10加到q2三极管11的基极,经脉冲变压器12升压至100vp-p左右,驱动efr40rs超声波传感器21发射超声波,r3电阻器18为限流电阻,r4电阻器17为下拉电阻;反射回的超声波经原收发一体封闭性超声波传感器21 变成毫伏级的一串脉冲信号,且d3二极管(15)、d4二极管16对其截止,该信号不会通过脉冲变压器12副边线圈形成短路,d1二极管20、d2二极管19也对其截止,r3电阻器18、d1 二极管(20)和d2二极管19组成双向限幅电路,避免发射时的大信号造成超声波电信号放大与整形电路23阻塞甚至损坏,回波脉冲信号经r3电阻器18和c3电容器22传到超声波电信号放大与整形电路23的in端口24,将回波脉冲信号放大整形后,其out端口26输出一个负脉冲电压至单片机9的p3.4端口3;同时单片机9内部程序进行累加脉冲个数mi(i=58) 并计算每个负脉冲电压的回传时间t,通过计算每个脉冲回传位置与相对于水平面的深(高)度,存入单片机9ram存储器内;当单片机9的p3.4端口3没有再收到负脉冲电压,总次数i累
加1,调取ram内本次mi个深(高)度数据s,并通过得到每个测量角度所测位置的平均深(高)度,存入单片机9ram存储器内;当次数i累加至 58后,t0定时器结束工作,调取单片机9内部ram存储器前28组平均深(高)度数据,并依据取前28组测量范围即落脚区域的平均深(高)度,调取单片机9内部ram 存储器58组平均深(高)度数据,并依据取全58组测量范围即超声波传感器 21测量区域的平均深(高)度,若|h1-h2|≥10cm,单片机9的p3.7端口5输出低电平;反之,输出高电平。
27.若p3.7端口5输出高电平,高电平分别输向a1电路接口34及通过r1电阻器35输向 q1三极管36基极,q1三极管36不导通,mk1蜂鸣器38不工作;高电平由a1电路接口34 通过r12电阻器99输向q8三极管98基极,q8三极管98不导通,k4继电器95处于不通电状态,spdt4单刀双掷开关86的动端89与不动端
②
88仍处于闭合状态,k3继电器81仍处于通电状态,即直流电动机80上端接负极、下端接正极,直流电动机80转向,车门仍处开启状态;
28.若p3.7端口5输出低电平,低电平分别输向a1电路接口34及通过r1电阻器35输向 q1三极管36基极,r1电阻器35为限流电阻,q1三极管36导通,蜂鸣器接通电源,开始工作,产生蜂鸣;低电平由a1电路接口34通过r12电阻器99输向q8三极管98基极,r12电阻器99为限流电阻,q8三极管98导通,k4继电器95通电,spdt4单刀双掷开关86的动端 89与不动端
①
87立即闭合并与不动端
②
88断开,此时k3继电器81由通电变为不通电状态, spdt5单刀双掷开关76的动端77与不动端
②
79复位闭合并与不动端
①
78复位断开,spdt6 单刀双掷开关73的动端72与不动端
②
74复位闭合并与不动端
①
75复位断开,接于直流电动机80的正负极对调,直流电动机80上端接正极、下端接负极,直流电动机80进行转向,车门处紧锁状态;
29.当s1复位开关69闭合时,5v电源68通过r7电阻器70、q5三极管66、r8电阻器67 组成的电平转换电路,于q5三极管66的集电极输出低电平,低电平通过r14电阻器100输向q4三极管65基极,r14电阻器100为限流电阻,q4三极管65导通,k2继电器62通电, spdt2单刀双掷开关52的动端53与不动端
②
54立即断开并与不动端
①
55闭合,spdt3单刀双掷开关56的动端57与不动端
②
58立即断开并与不动端
①
59闭合,5v电源49与单片机9 的pst端口(1)连通,系统复位,单片机9的p3.7端口5重新输出高电平,mk1蜂鸣器38 不工作;a3电路接口61与a4电路接口60断开,q8三极管98不导通,k4继电器95由通电转变为不通电状态,spdt4单刀双掷开关86的动端89与不动端
②
88复位闭合并与不动端
①ꢀ
87复位断开,5v电源91经电平转换电路发出的低电平重新输向q7三极管83基极,即k3继电器81由不通电变为通电状态,spdt5单刀双掷开关76的动端77与不动端
②
79立即断开并与不动端
①
78闭合,spdt6单刀双掷开关73的动端72与不动端
②
74立即断开并与不动端
①ꢀ
75闭合,接于直流电动机80的正负极对调,直流电动机80上端接负极、下端接正极,直流电动机80转向,车门处开启状态;
30.人员按下汽车s2中控锁开关92,系统在ms的时间单位内连通中控锁预险系统电源,使其工作,并经过信号处理及数据分析判定车门落脚区域所处深(高)度情况;若所处情况认定为有易绊倒的风险,系统发出警报且车门随即紧锁;当人员通过系统已了解落脚区域存在风险,按下s1复位开关69,警报停止,车门打开;
31.人员可通过该系统的辅助,提高下车时落脚区域的情况,可及时规避因未注意深坑及凸坡导致人员摔倒、扭脚的风险,保障了出行安全。
附图说明
32.图1为本发明的系统主流程图。
33.图2为本发明的系统数据处理环节流程图。
34.图3为本发明的单片机控制系统电路原理图。
35.图3中的标号名称:1.单片机rst端口、2.单片机p3.3端口、3.单片机p3.4端口、4.单片机gnd端口、5.单片机p3.7端口、6.单片机xtal1端口、7.单片机xtal2端口、8.单片机vcc端口、9.单片机、10.电阻器r10、11.三极管q2、12.脉冲变压器、13.r5电阻器、14.+12v 电源、15.d3二极管、16.d4二极管、17.r4电阻器、18.r3电阻器、19.d2二极管、20.d1二极管、21、超声波传感器、22.c3电容器、23.超声波放大与整形电路、24.超声波放大与整形电路in接口、25.超声波放大与整形电路gnd接口、26.超声波放大与整形电路out接口、 27.超声波放大与整形电路vcc接口、28.+5v电源、29.脉冲调制、30.pm型步进电机、31. 石英晶体振荡器y1、32.c1电容器、33.c2电容器、34、a1电路接口、35.电阻器r1、36.三极管q1、37.+5v电源、38.蜂鸣器mk1、39.单刀双掷开关spdt1、40.单刀双掷开关spdt1 的动端、41.单刀双掷开关spdt1的不动端
①
、42.单刀双掷开关spdt1的不动端
②
、43.继电器k1、44.二极管d5、45.+5v电源、46.三极管q3、47.电阻器r6、48.a2电路接口、49.+5v 电源、50.c4电容器、51.电阻器r13、52.单刀双掷开关spdt2、53.单刀双掷开关spdt2的动端、54.单刀双掷开关spdt2的不动端
②
、55.单刀双掷开关spdt2的不动端
①
、56.单刀双掷开关spdt3、57.单刀双掷开关spdt3的动端、58.单刀双掷开关spdt3的不动端
②
、59. 单刀双掷开关spdt3的不动端
①
、60.a4电路接口、61.a3电路接口、62.继电器k2、63.二极管d6、64.+5v电源、65.三极管q4、66.三极管q5、67.电阻器r8、68.+5v电源、69.复位开关s1、70.电阻器r7、100.电阻器r14。
36.图4为本发明的中控锁避险控制系统电路原理图。
37.图4中的标号名称:34.a1电路接口、60.a4电路接口、61.a3电路接口、71.直流电源、 72.单刀双掷开关spdt6的动端、73.单刀双掷开关spdt6、74.单刀双掷开关spdt6的不动端
②
、75.单刀双掷开关spdt6的不动端
①
、76.单刀双掷开关spdt5、77.单刀双掷开关spdt5 的动端、78.单刀双掷开关spdt5的不动端
①
、79.单刀双掷开关spdt5的不动端
②
、80.直流电动机、81.继电器k3、82.二极管d7、83.三极管q7、84.+5v电源、85.电阻器r11、86.单刀双掷开关spdt4、87.单刀双掷开关spdt4的不动端
①
、88.单刀双掷开关spdt4的不动端
②
、89.单刀双掷开关spdt4的动端、90.三极管q6、91.+5v电源、92.中控锁开关s2、93. 电阻器r9、94.电阻器r10、95.继电器k4、96.+5v电源、97.二极管d8、98.三极管q8、99. 电阻器r12。
具体实施方式
38.如图3、图4所示,一种基于超声波测距的单片机及继电器控制中控锁的下车防摔避险系统的方法,主要是由单片机控制系统和中控锁避险控制系统两部分组成,下文以人员无风险情况下车及人员遇安全风险后经系统应急措施后下车的实例说明本发明的方法。
39.当人员按下汽车车门s2中控锁开关92,5v电源91通过电平转换电路,于q6三极管90 的集电极输出低电平,低电平分别输向a2电路接口48及通过spdt4单刀双掷开关86、r11 电阻器85输向q7三极管83基极,q7三极管83导通,k3继电器81通电,通过spdt5单刀双掷开关76、spdt6单刀双掷开关73,使接于直流电动机80的正负极对调,直流电动机80 上端接负极、下端接正极,直流电动机80转向,车门处开启状态;低电平由a2电路接口48 通过r6电阻器47输向q3三极管46基极,q3三极管46导通,k1继电器43通电,通过spdt1 单刀双掷开关39使5v电源49与单片机vcc端口8导通,单片机开始工作;
40.单片机9的p3.3端口2输出一串40khz的脉冲电压,输往超声波发射与回波电路及转向电路,驱动efr40rs超声波传感器21发射超声波,超声波接触测量地面后形成回波脉冲信号经超声波电信号放大与整形电路23的放大整形后传至单片机9的p3.4端口3,同时单片机9 内部程序进行对每一测量范围回传的各个回波脉冲进行信号处理及数据分析;当于测量范围内分析完毕后,调取单片机9内部ram存储器前28组平均深(高)度数据得出落脚区域的平均深(高)度h1,调取单片机9内部ram存储器全58组平均深(高)度数据得出超声波传感器21测量区域的平均深(高)度h2,若|h1-h2|≥10cm,单片机9的p3.7端口5输出低电平;反之,输出高电平。
41.若p3.7端口5输出高电平,表明落脚区域处于相较于车辆所处水平面深(高)度差不大,车门落脚区域地面情况处于不易使人绊倒的安全范围内,系统无需做出应急措施。高电平分别输向a1电路接口34及通过r1电阻器35输向q1三极管36基极,q1三极管36不导通, mk1蜂鸣器38不工作;高电平由a1电路接口34通过r12电阻器99输向q8三极管98基极, q8三极管98不导通,k4继电器95处于不通电状态,spdt4单刀双掷开关86的动端89与不动端
②
88仍处于闭合状态,k3继电器81仍处于通电状态,即直流电动机80上端接负极、下端接正极,直流电动机80转向,车门仍处开启状态,人员可正常上下车;
42.若p3.7端口5输出低电平,表明落脚区域处于相较于车辆所处水平面深(高)度差较大,车门落脚区域地面情况有使人易绊倒的风险,系统需做出应急措施。低电平分别输向a1电路接口34及通过r1电阻器35输向q1三极管36基极,r1电阻器35为限流电阻,q1三极管 36导通,蜂鸣器接通电源,开始工作,产生蜂鸣;低电平由a1电路接口34通过r12电阻器 99输向q8三极管98基极,r12电阻器99为限流电阻,q8三极管98导通,k4继电器95通电,spdt4单刀双掷开关86的动端89与不动端
①
87立即闭合并与不动端
②
88断开,此时k3 继电器81由通电变为不通电状态,spdt5单刀双掷开关76的动端77与不动端
②
79复位闭合并与不动端
①
78复位断开,spdt6单刀双掷开关73的动端72与不动端
②
74复位闭合并与不动端
①
75复位断开,接于直流电动机80的正负极对调,直流电动机80上端接正极、下端接负极,直流电动机80进行转向,车门处紧锁状态;当人员通过系统做出的预警以及迫使车门紧缩的措施中知晓落脚区域所存的安全风险并因此提高身体警觉后,可打开s1复位开关69,使5v电源68通过电平转换电路,于q5三极管66的集电极输出低电平,低电平通过r14电阻器100输向q4三极管65基极,q4三极管65导通,k2继电器62通电,spdt2单刀双掷开关52的动端53与不动端
②
54立即断开并与不动端
①
55闭合,spdt3单刀双掷开关56的动端57与不动端
②
58立即断开并与不动端
①
59闭合,5v电源49与单片机9的pst端口1连通,系统复位,单片机9的p3.7端口5重新输出高电平,mk1蜂鸣器38不工作;a3电路接口61与a4电路接口60断开,q8三极管98不导通,k4继电器95由通电转变为不通电状态, spdt4单刀双掷开关86的动端89与
不动端
②
88复位闭合并与不动端
①
87复位断开,5v电源 91经电平转换电路发出的低电平重新输向q7三极管83基极,即k3继电器81由不通电变为通电状态,spdt5单刀双掷开关76的动端77与不动端
②
79立即断开并与不动端
①
78闭合, spdt6单刀双掷开关73的动端72与不动端
②
74立即断开并与不动端
①
75闭合,接于直流电动机80的正负极对调,直流电动机80上端接负极、下端接正极,直流电动机80转向,车门重新处开启状态,人员可正常下车。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1