一种间歇式RTO转阀运行的控制系统的制作方法
一种间歇式rto转阀运行的控制系统
技术领域
1.本实用新型是一种间歇式rto转阀运行的控制系统,属于rto转阀电气控制技术领域。
背景技术:
2.旋转式rto,也称旋转式蓄热式氧化炉,其原理是在高温下将可燃废气氧化成对应的氧化物和水,从而净化废气,并回收废气分解时所释放出来的热量,废气分解效率达到99%以上,热回收效率达到95%以上,旋转rto炉是利用挥发性有机废气在750℃以上时与空气中的氧气产生化学反应,生成co2和h2o的原理,分解vocs的一种设备,旋转式rto设备主要分为三个部分:上部是vocs氧化燃烧区,中部是将热量储存的蓄热区,下部是废气旋转分配区,旋转阀是rto中的重要设备,需要进行电气控制,从而实现相应的工艺要求。
3.现有的rto转阀运行方式是采用连续式,而连续式rto转阀运行方式存在如下的缺点:
4.1、连续式rto转阀运行方式存在电机运转时间长、机械摩擦磨损高、能耗高。
5.2、连续式rto转阀运行方式由于长时间的运转,在很大程度上缩减了rto转阀密封结构的寿命,在设备维护上增加了人工及成本。
6.3、连续式rto转阀运行方式由于废气在炉膛内部停留时间不能控制,从而很大程度上降低了rto的废气处理效率,加大了废气污染程度。
技术实现要素:
7.本实用新型要解决的技术问题是针对以上不足,提供一种间歇式rto转阀运行的控制系统,rto转阀间歇性控制方式运行效果好,能尽量多的时间保持转阀进出气的对应有效避免因旋转跨扇区带来的串气问题,从而提高了废气处理效率,节约能源,减少机械性的磨损,延长密封系统的寿命,低人工及维护成本。
8.为解决以上技术问题,本实用新型采用以下技术方案:
9.一种间歇式rto转阀运行的控制系统,包括控制器、执行器和电机m8,电机m8驱动rto转阀运行,控制器控制执行器动作使得rto转阀间歇性动作。
10.进一步的,所述控制器为plc或单片机,执行器为变频器或伺服驱动。
11.进一步的,所述控制器为plc,plc的i0.0脚连接有按钮sb1一端,按钮sb1另一端接24v,此部分用于急停按钮控制;plc的i0.1脚连接有转换开关sa1常开一端,转换开关sa1常开另一端接24v,此部分用于自动开关控制;plc的i0.2脚连接有转换开关sa1常闭一端,转换开关sa1常闭另一端接24v,此部分用于手动开关控制。
12.进一步的,所述plc的i0.3脚连接有按钮开关sb2一端,按钮开关sb2另一端接24v,此部分用于故障复位控制;plc的i0.4脚连接有按钮开关sb3一端,按钮开关sb3另一端接24v,此部分用于系统消音控制;plc的i0.5脚连接有按钮开关sb4一端,按钮开关sb4另一端接24v,此部分用于系统启动控制;plc的i0.6脚连接有按钮开关sb5一端,按钮开关sb5另一
d01+脚接24v;
22.所述伺服驱动qs的u2脚、v4脚和w1脚连接有电机m8的u1脚、v1脚和w1脚。
23.本实用新型采用以上技术方案,与现有技术相比,具有如下技术效果:
24.1、节能环保,与连续式转阀运行方式相比节约能源,减少机械性的磨损,延长密封部件的寿命,并且可达到预期的密封效果。
25.2、间歇性rto转阀运行方式由于废气在炉膛内部停留时间可以有效的控制,从而提高了rto的废气处理效率,减少了废气污染程度。
26.3、施工方便、成本低,直接通过修改plc程序控制来实现电机的间歇性运转无需添加其他辅助设备。
附图说明
27.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
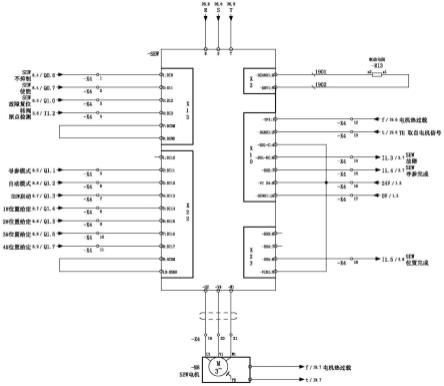
28.图1至图3为本实用新型实施例1中控制系统的电气原理图;
29.图4至图6为本实用新型实施例1中控制系统的电气原理图。
具体实施方式
30.实施例1,如图1至图3所示,一种间歇式rto转阀运行的控制系统,包括plc,plc作为控制器,plc的i0.0脚连接有按钮sb1一端,按钮sb1另一端接24v,此部分用于急停按钮控制;plc的i0.1脚连接有转换开关sa1常开一端,转换开关sa1常开另一端接24v,此部分用于自动开关控制;plc的i0.2脚连接有转换开关sa1常闭一端,转换开关sa1常闭另一端接24v,此部分用于手动开关控制;plc的i0.3脚连接有按钮开关sb2一端,按钮开关sb2另一端接24v,此部分用于故障复位控制;plc的i0.4脚连接有按钮开关sb3一端,按钮开关sb3另一端接24v,此部分用于系统消音控制;plc的i0.5脚连接有按钮开关sb4一端,按钮开关sb4另一端接24v,此部分用于系统启动控制;plc的i0.6脚连接有按钮开关sb5一端,按钮开关sb5另一端接24v,此部分用于系统停止控制;plc的i0.7脚连接有按钮开关sb6一端,按钮开关sb6另一端接24v,此部分用于备用控制。
31.所述plc的i1.0脚连接有压力传感器sp1一端,压力传感器sp1另一端接0v和24v,此部分用于气源压力检测控制;plc的i1.1脚连接有接近开关sq6一端,接近开关sq6另一端接0v和24v,此部分用于转阀高度检测控制;plc的i1.2脚连接有接近开关sq7一端,接近开关sq7另一端接0v和24v,此部分用于转阀原点检测控制。
32.所述plc的q0.0脚连接有继电器ka0一端,继电器ka0另一端接0v,此部分用于转阀运行控制;plc的q0.1脚连接有继电器ka1一端,继电器ka1另一端接0v,此部分用于转阀的故障控制;plc的q0.2脚连接有继电器ka2一端,继电器ka2另一端接0v,此部分用于转阀的故障报警控制;plc的q0.3脚连接有继电器ka3一端,继电器ka3另一端接0v,此部分用于转阀的故障蜂鸣控制;plc的q0.4脚连接有继电器ka4一端,继电器ka4另一端接0v,此部分用于转阀的自动指示控制;plc的q0.5脚连接有继电器ka5一端,继电器ka5另一端接0v,此部
分用于转阀的气囊高压控制。
33.所述控制系统还包括变频器sew,变频器sew为执行器,变频器sew的di0脚连接有plc的q0.6脚,用于变频器不抑制控制,变频器sew的di1脚连接有plc的q0.7脚,用于变频器使能控制,变频器sew的di2脚连接有plc的q1.0脚,用于变频器故障复位控制,变频器sew的di3脚连接有plc的i1.2脚,用于转阀原点检测控制,变频器sew的dcom脚连接变频器sew的dgnd脚。
34.所述变频器sew的di11脚连接有plc的q1.1脚,用于寻参模式控制;变频器sew的di12脚连接有plc的q1.2脚,用于自动模式控制;变频器sew的di13脚连接有plc的q1.3脚,用于变频器启动控制;变频器sew的di14脚连接有plc的q1.4脚,用于1#位置给定控制;变频器sew的di15脚连接有plc的q1.5脚,用于2#位置给定控制;变频器sew的di16脚连接有plc的q1.6脚,用于3#位置给定控制;变频器sew的di17脚连接有plc的q1.7脚,用于4#位置给定控制。
35.所述变频器sew的d01-nc脚连接有plc的i1.3脚,用于变频器故障控制;变频器sew的d02脚连接有plc的i1.4脚,用于变频器寻参完成控制;变频器sew的d05脚连接有plc的i1.5脚,用于变频器外置完成控制;变频器sew的d01-c脚、vi脚和vin1脚接24v,变频器sew的dgnd1脚接0v。
36.所述变频器sew的u2脚、v4脚和w1脚连接有电机m8的u1脚、v脚和w1脚,电机m8还连接有变频器sew的tf1脚和dgnd1脚,分别用于电机热过载控制和th取自电机信号控制。
37.转阀将炉体圆周等分为若干个扇区,每个扇区最终多少度,有划分扇区数量有关,比如若划分为12扇区,每个扇区为30
°
,设置好变频器位置控制参数,plc接到自动运行命令后,控制plc q1.2/q0.6/q0.7/q1.3/q1.4/q1.5/q1.7输出,待i1.6收到位置完成信号后,完成第一步动作停止输出等待响应的设定时间,当设定时间到进行下一步控制q1.3/q1.5/q1.7输出,待i1.6收到位置完成信号后,完成第二步动作停止输出等待响应的设定时间,当设定时间到进行第三步控制q1.3/q1.4/q1.7输出,待i1.6收到位置完成信号后,完成第三步动作停止输出等待响应的设定时间,当设定时间到进行第四步控制q1.3/q1.7输出,待i1.6收到位置完成信号后,完成第四步动作停止输出等待响应的设定时间,当设定时间到进行第五步控制q1.3/q1.4/q1.5 q1.6输出,待i1.6收到位置完成信号后,完成第五步动作停止输出等待响应的设定时间
……
待完成所有扇区数动作后,在进行第一步动作,完成对转阀的圆周间歇运动。
38.rto转阀间歇性控制方式运行效果好,能尽量多的时间保持转阀进出气的对应有效避免因旋转跨扇区带来的串气问题,从而提高了废气处理效率。
39.实施例2,如图4至图6所示,一种间歇式rto转阀运行的控制系统,包括plc,plc作为控制器,plc的i0.0脚连接有按钮sb1一端,按钮sb1另一端接24v,此部分用于急停按钮控制;plc的i0.1脚连接有转换开关sa1常开一端,转换开关sa1常开另一端接24v,此部分用于自动开关控制;plc的i0.2脚连接有转换开关sa1常闭一端,转换开关sa1常闭另一端接24v,此部分用于手动开关控制;plc的i0.3脚连接有按钮开关sb2一端,按钮开关sb2另一端接24v,此部分用于故障复位控制;plc的i0.4脚连接有按钮开关sb3一端,按钮开关sb3另一端接24v,此部分用于系统消音控制;plc的i0.5脚连接有按钮开关sb4一端,按钮开关sb4另一端接24v,此部分用于系统启动控制;plc的i0.6脚连接有按钮开关sb5一端,按钮开关sb5另
一端接24v,此部分用于系统停止控制;plc的i0.7脚连接有按钮开关sb6一端,按钮开关sb6另一端接24v,此部分用于备用控制。
40.所述plc的i1.0脚连接有压力传感器sp1一端,压力传感器sp1另一端接0v和24v,此部分用于气源压力检测控制;plc的i1.1脚连接有接近开关sq6一端,接近开关sq6另一端接0v和24v,此部分用于转阀高度检测控制;plc的i1.2脚连接有接近开关sq7一端,接近开关sq7另一端接0v和24v,此部分用于转阀原点检测控制。
41.所述plc的q0.0脚连接有继电器ka0一端,继电器ka0另一端接0v,此部分用于转阀运行控制;plc的q0.1脚连接有继电器ka1一端,继电器ka1另一端接0v,此部分用于转阀的故障控制;plc的q0.2脚连接有继电器ka2一端,继电器ka2另一端接0v,此部分用于转阀的故障报警控制;plc的q0.3脚连接有继电器ka3一端,继电器ka3另一端接0v,此部分用于转阀的故障蜂鸣控制;plc的q0.4脚连接有继电器ka4一端,继电器ka4另一端接0v,此部分用于转阀的自动指示控制;plc的q0.5脚连接有继电器ka5一端,继电器ka5另一端接0v,此部分用于转阀的气囊高压控制。
42.所述控制系统还包括伺服驱动qs,伺服驱动qs为执行器,伺服驱动qs的di1脚连接有plc的q0.5脚,用于伺服驱动使能控制,伺服驱动qs的di2脚连接有plc的q0.6脚,用于伺服驱动紧急停止控制,伺服驱动qs的di5脚连接有plc的q1.7脚,用于伺服驱动故障复位控制,伺服驱动qs的di3脚连接有plc的i1.2脚,用于转阀原点检测控制,伺服驱动qs的pl2脚连接伺服驱动qs的q0.0脚,用于伺服驱动位置脉冲,伺服驱动qs的pl1脚连接伺服驱动qs的q0.2脚,用于伺服驱动方向脉冲。
43.所述伺服驱动qs的alm1-脚连接有plc的i1.3脚,用于伺服驱动故障控制;伺服驱动qs的d01-脚连接有plc的i1.4脚,用于伺服驱动寻参完成控制;伺服驱动qs的-d01-脚连接有plc的i1.5脚,用于伺服驱动位置完成控制;伺服驱动qs的alm1+脚、d01+脚、-d01+脚接24v。
44.所述伺服驱动qs的u2脚、v4脚和w1脚连接有电机m8的u1脚、v1脚和w1脚。
45.转阀将炉体圆周等分为若干个区域,计算每个区域所运行的角度,实现位置精确控制。伺服电机首先设置好控制参数,伺服电机接到自动运行命令后,控制plc q0.5/q0.0/q0.2输出(脉冲数量由等分的若干个区域,计算而得),待i1.5收到位置完成信号后,完成第一步动作停止输出等待响应的设定时间,当设定时间到进行下一步控制plc q0.5/q0.0/q0.2输出,待i1.5收到位置完成信号后,完成第二步动作停止输出等待响应的设定时间,当设定时间到进行第三步控制plc q0.5/q0.0/q0.2输出,待i1.5收到位置完成信号后,完成第三步动作停止输出等待响应的设定时间,
……
这样一步一步进行下去,完成对转阀的圆周间歇运动的精确控制。
46.本实用新型的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好的说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1