基于快速非支配排序算法的点位价值评估方法与流程
[0001]
本发明属于多目标决策问题建模转换技术领域,特别涉及基于快速非支配排序算法的点位价值评估方法。
背景技术:
[0002]
多目标决策方法通过计算各节点指标给出节点的相对优劣性。在进行多目标决策时,尤其是指标个数大于3个时,各指标的权重占比是多数传统决策方法的重要参数。在已知具体问题中各指标相对重要程度的情况下,可以采用已存的分析方法算得各节点的重要度排序。但在实际应用场景中,并不能给出一个完全客观的指标权重占比,而点位价值评估结果与指标的权重占比是强相关的。也就是说,使用以主成分分析法、层次分析法结合变权理论等方法为代表的传统决策方法时,通常会得到较为主观的排序结果,而这是实际应用中不希望看到的。以信息熵结合变权理论为代表的纯数据驱动点位价值评估方法,从数据指标的分布角度切入,通过计算信息熵来衡量各个指标数据分布的稳定性,并依此对各个指标赋权进行加权计算,得到最终的点位排序结果。虽然未引入主观权重分配,但其排序结果与节点各指标数据分布的稳定性有着强相关性,因此其排序结果可解释性与可靠性较低。
技术实现要素:
[0003]
本发明的目的在于提供基于快速非支配排序算法的点位价值评估方法,以解决上述问题。
[0004]
为实现上述目的,本发明采用以下技术方案:
[0005]
基于快速非支配排序算法的点位价值评估方法,包括以下步骤:
[0006]
步骤1,将点位属性抽象为备选方案作为候选解加入解空间s,将方案中多个指标抽象为多个目标,并令各个目标为minimize f
i
(x)=x
i
,将点位价值评估问题建模转换为多目标优化问题;
[0007]
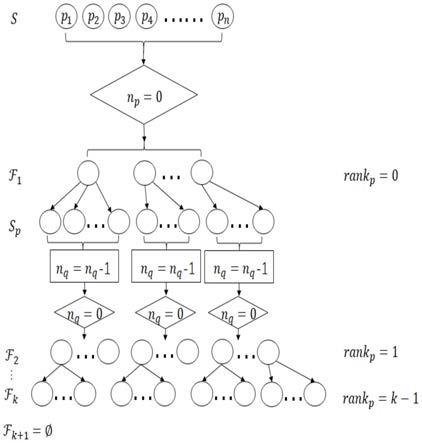
步骤2,使用快速非支配排序算法,求解不同支配等级rank的帕累托解集步骤2,使用快速非支配排序算法,求解不同支配等级rank的帕累托解集帕累托解集即为多目标组合优化问题的非支配解集,其能够反映出多目标组合优化问题中目标之间的取舍关系,为最终的决策者提供有价值的信息;
[0008]
步骤3,根据非支配解集的性质,将所有点位划分为k个等级,即所有点位的优劣性被评估为k个层次,且中必然存在比中点位更加优秀的对应点位(1≤i<j≤k)。
[0009]
进一步的,步骤1中,将点位价值评估中的各节点的指标抽象为备选方案作为候选解加入解空间s,将点位价值评估问题抽象为多目标组合优化问题:
[0010]
maximizef(x)=(f1(x),...,f
m
(x))
[0011]
subjecttox=(x1,x2,...,x
m
)∈s
[0012]
其中x
i
(i=1,2,...,m)为点位各指标,s为候选解空间,各子优化问题为:
[0013]
x
i
=argmax(f
i
(x
i
))i=1,2,...,m。
[0014]
进一步的,步骤2中,利用快速非支配排序算法对多目标优化问题进行非支配解集计算:对计算非支配等级rank
q
,若一个解不被其他任何解所支配,则其rank
q
=0;若一个解被其他两个解所支配,则其rank
q
=2;将所有rank
q
=0的解q加入并对所支配的解集s
q
有:rank
p
=rank
p-1,若rank
p
=0则将解p其加入
[0015]
进一步的,重复上述步骤,直至所有的解rank
p
=0,停止迭代,并返回非支配解集
[0016]
进一步的,步骤3依据步骤2的计算结果,将解空间s划分为即
[0017][0018]
且
[0019][0020]
则对有:
[0021][0022]
其中1≤i<j≤k;即中必然存在比中点位更加优秀的对应点位,因此依据此性质,所有点位可划分为k个等级,即所有点位的优劣性被评估为k个层次,从而达到点位价值评估的目的。
[0023]
与现有技术相比,本发明有以下技术效果:
[0024]
基于非支配排序算法的点位价值评估方法为纯数据驱动方法,无需对各指标引入任何人为主观参数,且计算结果十分直观,能有效反映各方案间的优劣取舍关系,为最终的决策者提供有价值的决策信息。
附图说明
[0025]
图1为快速非支配排序算法流程图
[0026]
图2为2-目标非支配排序f_i分布图
[0027]
图3为2-目标非支配排序在解空间s中的分布图。
具体实施方式
[0028]
以下结合附图对本发明进一步说明:
[0029]
在优化学科中,有一个专门的领域是研究当优化目标不止一个时如何进行优化,即每个备选解都有若干个不同的目标函数值。点位价值评估与多目标优化的逻辑有共通之处,都是要基于备选方案(解)在多个指标(目标函数)上的值(目标函数值)来做出排序(迭代优化)。这里借用多目标优化中非支配排序的概念来辅助点位价值排序的说明。
[0030]
在大多数情况下,多目标组合优化问题的目标之间存在一定的取舍关系,即不存在能在所有的目标上都达到最优值的可行解。因此对于多目标组合优化问题,人们的目标
往往是找到或逼近该问题的帕累托最优解集(pareto set,ps)。在最小化问题情况下,帕累托最优解集及相关概念定义如下:
[0031]
支配关系:如果向量u=(u1,...,u
m
)和向量v=(v1,...,v
m
)满足u
k
≤v
k
,,则称向量u支配向量v,记为u<v。
[0032]
互不支配解:如果向量u不支配向量v且向量v也不支配向量u,则称u和v互相不支配,记作或
[0033]
帕累托最优解:如果解空间s内的一个可行解x
*
满足:则称x
*
为解空间s内的一个帕累托最优解。
[0034]
帕累托最优解集:对于一个多目标组合优化问题,其解空间s内的所有帕累托最优解所组成的集合称为帕累托最优解集,记作而帕累托最优解集所对应的目标向量则为帕累托前沿(pareto front,pf),记作pf={f(x)|x∈ps}。帕累托最优解集即为多目标组合优化问题的理想解集,其能够反映出多目标组合优化问题中目标之间的取舍关系,为最终的决策者提供有价值的信息。
[0035]
支配解集:对于一个多目标组合优化问题,对其解空间s中任意解p有支配解集,即p所支配的解组成的集合,记作s
p
={q∈s|p<q}。
[0036]
非支配等级:对于解空间s中的任意解p,解空间s中支配p的解的个数,记作n
p
。显然,当n
p
=0时,p是帕累托最优解,将n
p
=0的解存入集合令该集合内的解的等级为0,记p
rank
=0;再计算的帕累托解集,将其存入集合记p
rank
=1;依次类推直至s为空集,可以得到s中所有解的非支配等级p
rank
,显然,一个解的p
rank
越小,其支配的解越多,解越优秀。
[0037]
在有了如上定义基础后,引入如下的非支配排序算法。对于一个多目标组合优化问题:
[0038]
minimize f(x)=(f1(x),...,f
m
(x))
[0039]
subject to x∈s
[0040]
对解空间s,为了得到该问题的帕累托解,先对解空间进行一次遍历,对初始化n
p
=0,计算s
p
,计算n
p
,计算对对令n
q
=n
q-1,若n
q
=0,则q
rank
=1,q=q∪{q},令依此类推,具体算法流程如图1所示。
[0041]
第一步:将备选方案抽象为候选解加入解空间s。
[0042]
第二步:将方案中多个指标抽象为多个目标,并令各个目标为minimize f
i
(x)=x
i
,即可将多目标决策问题建模转换为多目标优化问题。
[0043]
第三步:使用快速非支配排序算法,求解出不同rank的
[0044]
传统方法的局限性:
[0045]
主成分分析法的主成分累计贡献率计算公式如下:
[0046]
[0047]
通常当累计贡献率α
p
达85%-90%时,选取前p个指标作为p个主成分,代替原来的m个指标,从而对p个主成分进行分析,因此α
p
的选取会对原始指标数据产生较大的影响,从而影响最终决策方案的客观性;
[0048]
层次分析法的第一步建立层次结构模型,即将有关的各个因素按照不同属性自上而下地分解成若干层次,相当于人为地将指标进行层次划分,主观成分极大,从而影响最终决策方案的客观性。
[0049]
基于粗糙集的计算方法定义了一个四元组s=(u,a,v,f),其中a=c∪d(c∩d=是非空的节点属性有限集,其中条件属性c是节点重要度属性的集合,而c的设定会对决策结果产生决定性的影响。
[0050]
本发明提出的点位价值评估方法的适用条件是点位个数大于等于2,点位属性个数大于等于2。在满足上述条件时,基于非支配排序算法的点位价值评估方法均能给出一个完全客观的排序方案。
[0051]
具体解释如下:
[0052]
节点价值的评估难度随节点属性个数增加呈递增状态,若每次增删节点属性都需要重新调整指标权重占比,计算起来较为麻烦且结果客观性难以保证。因此,引入基于非支配排序的点位价值评估方法可以有效降低节点属性个数过多时的评估难度与评估时间,且其结果完全客观。
[0053]
以深圳市龙华区所有十字路口为原型的非支配排序为例:
[0054]
下面对获取的龙华区642个十字路口进行非支配排序,为便于观察算法特性,考虑2-目标优化问题如下:
[0055]
maximize f(x)=(f1(x),f2(x))
[0056]
subjecttox∈s
[0057]
其中f1,f2分别表示某个路口的方圆500米的人口密度与车站个数这两个指标数值,数据形式如表1所示。
[0058]
表1龙华区十字路口指标集
[0059] 节点坐标station车站数量人口密度1point(114.05934772065222.722245086924)321699.5712point(113.99718024440422.693006985606)371194.821
…………
642point(114.01918777021622.6335622636424)553168.705
[0060]
而解空间s={x
i
,i=1,2,...,642}。也就是说,将原问题转换为依据人口密度与车站数量取极大值的2-目标问题寻优排序。
[0061]
快速非支配排序算法流程如图1所示。
[0062]
对上述2-目标优化问题使用快速非支配排序算法后可得分布如图2所示。
[0063]
由图2易知,解空间s中的642个point在非支配排序后被划分为72个rank,即具体的point分布情况如下图3所示。
[0064]
图3中point颜色由深到浅表示节点所属rank从高到低;通过图3可以发现,同一rank的point互不支配,即在不进行进一步选取策略时,同一内的point是无序的,也就是
说同一内的节点是不分优劣的,他们在当前所有的节点中占据同等地位,因此在决策者在进行最优方案选取时,只需直接在内选择,且同一内的节点虽然各不相同,但每个节点都会在至少某个指标上优于内的其他节点。
[0065]
本发明提出的基于非支配排序算法的点位价值评估方法也并非全无缺点:
[0066]
在上述例子中选取了2个指标作为目标来对642个节点进行非支配排序,将其划分为了72个等级。通过实验发现,当选取5个指标作为目标时,非支配等级数目被划分为了23个等级。随着目标数目不断增多,非支配等级会不断减少,即所有等级的节点数目不断增多,而在采取进一步的比对策略前,每一个等级内的节点的重要度是等价的,因此,当目标数目非常大时,每一个等级内的节点数目会非常多,这会令决策者在内选取最优解决方案时较为不便。
[0067]
但毋庸置疑,基于非支配排序的点位价值评估方法完全客观地反映了节点的重要性,并将所有节点依节点属性进行了相应的分层并呈现在了决策者面前,显而易见的是,决策者在中选取一个节点记为a,则必然能在中找到比a更优秀的节点b。
[0068]
因此该方法大大减少了决策者所需考虑的决策区间,若需要添加任何主观的决策因素,完全可以在本发明涉及的评估方法完成后再进行,如对某一内的多个节点进行主成分分析从而进一步划分出价值高低等等。以上就是本发明的原理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1