一种双驱动肘杆机构优化方法
1.本发明涉及一种双驱动肘杆机构优化方法,尤其是指一种伺服机械压力机用双驱动肘杆机构优化方法。
背景技术:
2.机械压力机是一种重要的金属成形装备,也是最重要的机械装备之一,肘杆式机械压力机是其中的一种主要类型。肘杆式机械压力机具有工作行程速度慢、增力比大、滑块在下死点保压时间长等特点,且机身刚性好,适合于金属精密压制成形或挤压成形,广泛应用于机械、汽车、仪器仪表等行业。
3.传统肘杆式机械压力机的工作机构运动简图如图1所示,其工作机构由曲柄11、连杆12、肘杆13和14、滑块15组成。其采用普通电机驱动飞轮运转,工作时飞轮释放积蓄的动能和电机转动一起驱动曲柄1转动,通过连杆12、肘杆13和14带动滑块15作上下往复运动。由于其工作机构运动方式不能控制,因此这种传统肘杆压力机滑块运动方式相对固定不变、压力机功能单一,工艺适应性较差,且电机不停带动飞轮旋转导致总能耗高,不适应现代制造业的发展。
4.随着大功率伺服电机驱动的发展,伺服驱动开始应用了于成形装备中。伺服驱动的机械压力机采用伺服电机直接驱动,其驱动电机的转速和扭矩可以实时控制和调节,因此压力机的自动化、智能化程度提高,工作效率提高;且可以获得任意的滑块特性,设备的工艺适应性扩大;可以根据不同的工艺采用相应的优化曲线,提高工作性能。伺服压力机一般取消了飞轮,简化了传动环节,驱动电机只在工作时启动,因此具有显著的节能效果。同时,伺服压力机还具有精度高、绿色环保和提高模具寿命的特点。因此伺服压力机得到了迅速的发展和应用。对于伺服电机直接驱动的肘杆式压力机,如仍然采用传统肘杆式压力机的工作机构,则选用伺服驱动电机的瞬时功率和扭矩将远大于传统压力机的普通感应电机,导致压力机造价昂贵,成本高,不利于推广应用。因此,必须采用新的工作机构。
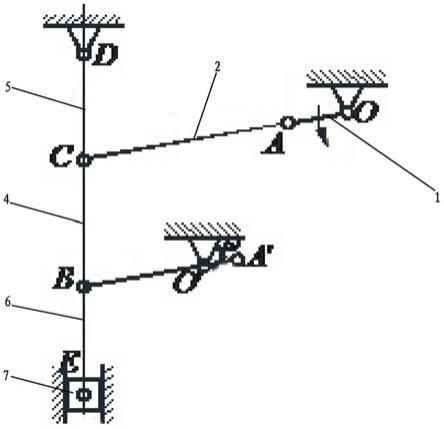
5.专利号“cn201510013662.7”公开了“一种伺服机械压力机用双驱动肘杆机构及其控制方法”。该方法提出一种伺服机械压力机用双驱动肘杆机构,可实现压力机工程压力行程和下死点可调、滑块运动方式可任意设置,大大提升压力机的性能和适用性,且能降低单台驱动电机的扭矩和瞬时功率,工作机构运动简图如图2和3所示。该伺服机械压力机用双驱动肘杆机构,包括有第一曲柄1、第二曲柄1
′
、第一连杆2、第二连杆3、第一肘杆4、第二肘杆5、第三肘杆6,其中第一曲柄1的一端与机身连接构成转动副o,第一曲柄1的另一端与第一连杆2的一端连接构成转动副a,第一连杆2的另一端分别与第一肘杆4的一端及第二肘杆5的一端连接构成转动副c,第一肘杆5的另一端与机身连接构成转动副d,第二曲柄1
′
的一端与机身连接构成转动副o
′
,第二曲柄1
′
的另一端与第二连杆3的一端连接构成转动副a
′
,第二连杆3的另一端分别与第一肘杆4的另一端及第三肘杆6的一端连接构成转动副b,第三肘杆6的另一端与滑块7连接构成转动副e,滑块7置于机身的导轨上构成移动副,滑块7能沿机身导轨作往复直线移动。相对于传统的肘杆机构,该伺服机械压力机用双驱动肘杆工作
机构由1个驱动增加为2个驱动,在保持压力机公称压力机前提下,能显著降低单台伺服驱动电机的扭矩和瞬时功率。可实现压力机工程压力行程和下死点可调、滑块运动方式可任意设置,大大提升压力机的性能和适用性,且能降低单台驱动电机的扭矩和瞬时功率。
6.一般的双驱动肘杆工作机构并不能充分发挥该工作机构的优点,对驱动电机的扭矩和瞬时功率的降低以及工作性能的提升只能起到有限的作用,不利于该机构在实际伺服压力机中应用。因此,为充分发挥该工作机构的优点,促进该工作机构的推广应用,应提出合理的机构优化设计方法对该机构进行优化。但由于结构复杂,优化变量多,且为多目标优化,传统的优化方法难以获得最优解,所以需要提出一种伺服机械压力机用双驱动肘杆机构优化方法。
技术实现要素:
7.本发明的目的在于针对上述问题,提供一种伺服机械压力机用双驱动肘杆机构优化方法。
8.本发明的目的可采用以下技术方案来达到:
9.一种双驱动肘杆机构优化方法,包括以下步骤:
10.步骤1、根据压力机设计的整体要求,确定双驱动肘杆工作机构的基本结构参数,将整个机构分为上肘杆和下肘杆两部分;
11.步骤2、据压力机肘杆机构的最大总高度设定下肘杆部分的结构参数,假定下肘杆部分初始结构为等长肘杆结构;
12.步骤3、在设定的下肘杆部分结构参数基础上,上肘杆部分和下肘杆部分机构作为整体,以驱动扭矩为优化目标,以上肘杆机构参数为优化变量,设定上肘杆机构参数的约束条件,进行双驱动肘杆工作机构的结构优化,得到上肘杆部分的优化的结构参数;
13.步骤4、在步骤3得到的上肘杆部分结构参数的基础上,上肘杆部分和下肘杆部分机构作为整体,以驱动扭矩为优化目标,以下肘杆机构参数为优化变量,设定下肘杆机构参数的约束条件下,进行双驱动肘杆工作机构的机构优化,得到下肘杆部分的优化的结构参数;
14.步骤5、改变步骤3中的杆长约束条件,反复进行步骤3和步骤4的迭代结构优化,在驱动扭矩优化目标值趋于稳定不变后,最终得到整个机构的优化结构参数。
15.进一步地,所述步骤1的基本参数包括:公称压力、公称压力行程,总行程,压力机最大总高度,压力机最大总宽度,以及各曲柄、连杆和肘杆的长度。
16.进一步地,步骤2中所述下肘杆部分的两个肘杆的长度相等,设为机构最大总高度的三分之一,且两个肘杆共线,且下肘杆部分的连杆与肘杆长度相等,下肘杆部分的曲柄为连杆的三分之一,曲柄与连杆共线,连杆与肘杆之间的夹角为90度。
17.进一步地,步骤3中所述上肘杆部分的肘杆的最大长度设为机构最大总高度的三分之一,上肘杆部分的连杆的最大长度等于肘杆的最大长度,上肘杆部分的曲柄的最大长度设为肘杆的最大长度的三分之一。
18.进一步地,步骤4中所述约束条件为:下肘杆部分的两个肘杆的最大杆长分别为下肘杆部分连杆的最大杆长为l
2max
=l
4max
,下肘杆部分曲柄
的最大杆长为得到下肘杆部分的优化的机构参数;其中,l
2max
=l
4max,
其中k1、k2的取值范围为1~1.2,h为机构最大总高度。
19.进一步地,步骤5中所述上肘杆部分连杆的最大杆长为l
5max
=h
‑
l4‑
l6,h为机构最大总高度。
20.进一步地,所述步骤5在得到扭矩目标函数值趋于稳定后,判断条件为其中x
i
表示当今步骤得到的扭矩目标函数值,x
i
‑1表示上一步骤得到的扭矩目标函数值,最终得到的所有优化参数。
21.实施本发明,具有如下有益效果:
22.本发明分开地进行上、下部分机构的优化设计。在优化设计时,将两个驱动部分分开进行有先后顺序的优化,即对两个驱动进行独立地以驱动扭矩和滑块运动为多目标优化,能有效地找到全局极值,提高了优化速率。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1是本发明双驱动肘杆机构优化方法的双驱动肘杆工作机构的初始位置结构示意图;
25.图2为本发明双驱动肘杆机构优化方法在曲柄和连杆不共线时的结构示意图;
26.图3为本发明双驱动肘杆机构优化方法的肘杆与轴线de的夹角大于零时的结构示意图;
27.图4为本发明双驱动肘杆机构优化方法的上肘杆部分的优化设计的结构示意图;
28.图5为本发明双驱动肘杆机构优化方法的下肘杆部分的优化设计的结构示意图;
29.图6为本发明双驱动肘杆机构优化方法的流程框图;
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例:
32.参见图1至图6,本实施例涉及双驱动肘杆机构优化方法,包括以下步骤:
33.步骤1、根据压力机设计的整体要求,确定双驱动肘杆工作机构的基本结构参数,将整个机构分为上肘杆和下肘杆两部分;所述基本结构参数包括:公称压力、公称压力行
程,总行程,压力机最大总高度,压力机最大总宽度,以及各曲柄、连杆和肘杆的长度。
34.步骤2、据压力机肘杆机构的最大总高度设定下肘杆部分的结构参数,假定下肘杆部分初始结构为等长肘杆结构;所述下肘杆部分的两个肘杆的长度相等,设为机构最大总高度的三分之一,且两个肘杆共线,且下肘杆部分的连杆与肘杆长度相等,下肘杆部分的曲柄为连杆的三分之一,曲柄与连杆共线,连杆与肘杆之间的夹角为90度。
35.步骤3、在设定的下肘杆部分结构参数基础上,上肘杆部分和下肘杆部分机构作为整体,以驱动扭矩为优化目标,以上肘杆机构参数为优化变量,设定上肘杆机构参数的约束条件,进行双驱动肘杆工作机构的结构优化,得到上肘杆部分的优化的结构参数;所述上肘杆部分的肘杆的最大长度设为机构最大总高度的三分之一,上肘杆部分的连杆的最大长度等于肘杆的最大长度,上肘杆部分的曲柄的最大长度设为肘杆的最大长度的三分之一。
36.步骤4、在步骤3得到的上肘杆部分结构参数的基础上,上肘杆部分和下肘杆部分机构作为整体,以驱动扭矩为优化目标,以下肘杆机构参数为优化变量,设定下肘杆机构参数的约束条件下,进行双驱动肘杆工作机构的机构优化,得到下肘杆部分的优化的结构参数;所述约束条件为:下肘杆部分的两个肘杆的最大杆长分别为下肘杆部分连杆的最大杆长为为l
2max
=l
4max
,下肘杆部分曲柄的最大杆长为得到下肘杆部分的优化的机构参数;其中l
2max
=l
4max
,其中k1、k2的取值范围为1~1.2,h为机构最大总高度。
37.步骤5、改变步骤3中的杆长约束条件,反复进行步骤3和步骤4的迭代结构优化,在驱动扭矩优化目标值趋于稳定不变后,最终得到整个机构的优化结构参数。所述上肘杆部分连杆的最大杆长为l
5max
=h
‑
l4‑
l6,h为机构最大总高度。
38.所述步骤5在得到扭矩目标函数值趋于稳定后,判断条件为其中x
i
表示当今步骤得到的扭矩目标函数值,x
i
‑1表示上一步骤得到的扭矩目标函数值,最终得到的所有优化参数。
39.具体的,双驱动肘杆工作机构的初始位置,如图1所示,工作机构运动时,曲柄1和曲柄1
′
都作逆时针旋转。滑块7位于初始位置的下死点时,肘杆4、肘杆5和肘杆6共线,即d、c、b和e4个点共线,滑块7可沿de直线方向作往复运动。滑块7位于下死点的初始位置时,曲柄1和连杆2共线,即o、a和c3个点共线,曲柄1与x轴的夹角为曲柄1
′
和连杆3共线,即o
′
、a
′
和b3个点共线,曲柄1
′
与x轴的夹角为这样可以使在曲柄1和曲柄1
′
同步旋转运动时,滑块在一个运动周期内只经过一次下死点,保证压力机加载运动的单调性。
40.但在一定条件下,如图2所示,当曲柄1和连杆2不共线、曲柄1
′
和连杆3不共线时,这样也可以保证在曲柄1和曲柄1
′
同步旋转运动时,滑块在一个运动周期内只经过一次下死点,保证压力机加载运动的单调性。该发明讨论在此情况下的双驱动肘杆工作机构。
41.如机构的总行程为s0,公称压力行程为s,在滑块向下滑动处于公称压力行程时,
机构中肘杆5与轴线de的夹角为α,肘杆6与轴线de的夹角为β,如图6所示,则机构能承受的公称压力为n。压力机最大总高度可由机构初始状态时de两点的距离h限定,设定最大总高度为h0。
42.如图3所示,机构取d点为坐标原点,上肘杆部分机构设曲柄1长度为l1,连杆2长度为l2,肘杆5长度为l5,曲柄1与x轴的夹角为连杆2与x轴的夹角为o点坐标为(x1,y1),则上肘杆部分机构由l1、l2、l5、和完全确定。x1和y1与l1、l2、l5、和相关。而下肘杆部分结构设曲柄1
′
长度为l1′
,连杆3长度为l3,肘杆4长度为l4,肘杆6长度为l6,曲柄1
′
与x轴的夹角为连杆3与x轴的夹角为为确保上部分结构的不受过多来自下部分机构的约束,故假定下肘杆部分初始结构为等长肘杆结构。其中肘杆4和肘杆6的长度应设为机构总高度的三分之一,即而连杆的长度应等于肘杆的长度,曲柄1
′
的长度等于连杆长度的三分之一,曲柄、连杆与x轴的角度为0度。
43.由于先对上部分肘杆进行优化,则第一步先假定下肘杆部分结构参数的为给定值。根据力和运动解耦优化设计方法,当滑块向下滑动处于滑块工作行程,滑块7承受公称压力时,此时曲柄1的驱动扭矩为曲柄1
′
的驱动扭矩为则优化目标为n+n
′
取极小值,即
44.根据机构初始条件有:
45.对于压力机最大总高度h,应有h≤设定参数;
46.对于压力机的总行程s
总
,应有s
总
≥设定参数;
47.对于总有
48.当时,
49.当时,
50.因为上部分肘杆机构为曲柄摇杆机构,则有曲柄存在条件:
51.l1+l2≤l5+l
od
52.l1+l5≤l2+l
od
53.l1+l
od
≤l5+l254.其中,l
0d
代表机架,表示点o到点d的直线距离。
55.根据曲柄连杆构件制造及机身结构要求有:
56.l
1min
≤l1≤l
1max
57.l
2min
≤l2≤l
2max
58.l
5min
≤l5≤l
5max
59.x
1min
≤x1≤x
1max
60.其中对各杆长的范围进行限制,其杆长最小值由于受到制造工艺等要求,因为确定值,但各杆长的最大值可以随着优化计算过程进行动态调整。其中设定
61.根据图6初始模型结构,机构由l1、l2、l5、和完全确定,则优化的参数也为l1、l2、l5、和
62.在获得上部分肘杆机构参数的优化值后,建立如图4所示的基本模型,取d点为坐标原点,曲柄1的长度与角度、连杆2的长度与角度、上肘杆5的长度是上一步得到的优化值。设曲柄1
′
长度为l1,连杆3长度为l3,肘杆4长度为l4,肘杆6长度为l6,曲柄1
′
与x轴的夹角为连杆3与x轴的夹角为o
′
点坐标为(x
′1,y
′1),则机构由l1′
、l3、l4、l6、和完全确定。x
′1和y
′1与l1′
、l3、l4、l6、和相关。
63.将第一步得到的上肘杆部分机构的优化参数作为固定值,根据力和运动解耦优化设计方法,当滑块向下滑动处于滑块工作行程,滑块7承受公称压力时,此时曲柄1的驱动扭矩为曲柄1
′
的驱动扭矩为则优化目标为n+n
′
取极小值,即
64.约束条件
65.根据机构初始条件有:
66.对于压力机最大总高度h,应有h≤设定参数;
67.对于压力机的总行程s
总
,应有s总≥设定参数;
68.当时,
69.当时,
70.因为下部分肘杆机构为曲柄摇杆机构,则有曲柄存在条件:
71.l1′
+l3≤l4+l
o
′
c
72.l1′
+l3≤l4+l
o
′
c
73.l1′
+l
o
′
c
≤l4+l374.其中,l
o
′
c
代表机架,表示点o
′
到点c的直线距离;
75.根据曲柄连杆构件制造及机身结构要求有:
76.l1′
min
≤l1′
≤l1′
max
77.l
3min
≤l3≤l
3max
78.l
4min
≤l4≤l
4max
79.l
6min
≤l6≤l
6max
80.x
′
1min
≤x
′1≤
x
′
1max
81.其中l
2max
=l
4max
,其中k1、k2的取值范围为1~1.2,根据具体优化过程而定。
82.根据图5初始模型结构,机构由l1′
、l3、l4、l6、和完全确定,则优化的参数也为l1′
、l3、l4、l6、和
83.根据双驱动肘杆工作机构的特点及以部分机构为主体的优化原理,提出双驱动肘杆工作机构的驱动扭矩迭代优化算法,具体计算流程为:
84.1)根据压力机设计的整体要求,确定双驱动肘杆工作机构的基本技术参数,包括
公称压力、公称压力行程,总行程,压力机最大总高度,压力机最大总宽度,以及各曲柄、连杆和肘杆的长度要求。
85.2)根据压力机的最大总高度设定下部分的机构参数,假定下肘杆部分初始结构为等长肘杆结构。其中肘杆4和肘杆6的长度应设为机构总高度的三分之一,即而连杆3的长度应等于肘杆的长度,曲柄1
′
的长度等于连杆长度的三分之一,曲柄、连杆与x轴的角度为0
°
。
86.3)在设定的下肘杆部分机构参数基础上,上肘杆部分和下肘杆部分机构的作为整体,以上肘杆机构参数为优化变量及约束条件下,进行上肘杆部分的结构优化,得到优化的机构参数l1、l2、l5、和其中设定l
2max
=l
5max
,
87.4)进行下肘杆部分的机构优化,以步骤3)得到的上部分机构参数的基础上,上肘杆部分和下肘杆部分机构的作为整体,以下肘杆机构参数为优化变量及约束条件下,进行下肘杆部分的机构优化(其中约束条件l4和l6的最大杆长条件应设置为)得到优化的机构参数l1′
、l3、l4、l6、和其中l
2max
=l
4max
,其中k1、k2的取值范围为1~1.2,根据具体优化过程而定。
88.5)以步骤4)得到的下部分机构参数与上肘杆机构设计变量一起进行优化,其中l5的最大杆长条件应设置为l
5max
=h
‑
l4‑
l6,得到优化的机构参数l1、l2、l5、和
89.6)改变第3)步的杆长约束条件l
5max
=h
‑
l4‑
l6,反复进行步骤3)和步骤4)的迭代机构优化,在得到扭矩目标函数值趋于稳定后,判断条件为其中x
i
表示当今步骤得到的扭矩目标函数值,x
i
‑1表示上一步骤得到的扭矩目标函数值,最终得到的优化参数l1、l2、l5、l1,、l3、l4、l6、、和
90.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1