一种基于图像划分的快速均匀的特征点提取方法
1.本发明属于计算机视觉技术领域,具体涉及一种基于图像划分的快速均匀的特征点提取方法。
背景技术:
2.实时定位与建图(slam)是机器人导航和控制研究领域的两个基本问题,机器人研究领域的同步定位与地图构建slam技术是协同解决这两大问题的关键技术之一。目前,slam技术是机器人、自动驾驶、增强现实等领域的关键技术之一,是智能移动平台感知周围环境变化的基础技术。由于图像或视频能够提供丰富的环境信息,所以大部分slam技术研究集中于视觉算法(vsalm)。在vslam中,图像特征点提取是slam的核心之一,关系到后续的定位与建图,同时,在图像拼接、目标跟踪、人脸识别、三维重建等领域有着广泛应用。然而,现有的图像特征点提取方法存在提取结果不均匀,信息冗余,无法提供丰富的空间信息。
技术实现要素:
3.本发明的目的是提供一种基于图像划分的快速均匀的特征点提取方法,解决了现有的图像特征点提取方法存在提取结果不均匀,信息冗余,无法提供丰富的空间信息的问题。
4.本发明所采用的技术方案是,一种基于图像划分的快速均匀的特征点提取方法,具体包括基于图像划分的快速均匀的特征点提取方法和图像特征点均匀分布评价标准。
5.本发明的特点还在于:
6.其中特征点提取方法具体包括以下步骤:
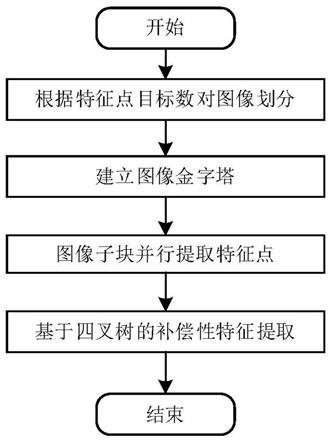
7.步骤1,根据目标提取特征点个数,将图像划分为与目标特征点个数一致的矩形区域;
8.步骤2,构建图像金字塔;
9.步骤3,对图像子块金字塔并行特征点检测;
10.步骤4,将所有提取的特征点映射到原始图像上;
11.步骤5,对于没有提取到特征点的图像块,采用四叉树的方式进行补偿提取;
12.其中步骤1具体为,若目标提取特征点数量为t,则将目标图像划分为t个i
×
j大小的图像块,i和j表示图像块的宽和高,i和j的计算方法如公式(1)所示,式中w、h分别为目标图像的宽和高:
[0013][0014]
其中步骤2具体为:目标图像采用缩放因子为0.8,构建最高层数为3的图像金字塔,得到如图3所示的图像金字塔,第0层表示原始目标图像;
[0015]
其中步骤3对图像子块金字塔并行特征点检测,具体步骤如下:
[0016]
步骤3.1,划分后的图像块在图像金字塔中形成了图像子块金字塔;
[0017]
步骤3.2,对每个图像子块金字塔从底层向上逐一提取fast特征点,当检测到第一个特征点后立即结束此区域的提取任务;
[0018]
步骤3.3,对于步骤3.1中得到的t个图像子块金字塔,采用步骤3.2中的方法同时对多个图像子块金字塔并行提取;
[0019]
其中步骤5中对于没有提取到特征点的图像块,采用四叉树的方式进行补偿提取,具体步骤如下;
[0020]
步骤5.1,原始目标图像上的图像块自左向右,自上向下排序;
[0021]
步骤5.2,根据排序遍历每一个图像块,对于没有检测到特征点的图像块,找到该图像块的下一个提取到特征点的图像块,将该图像块划分为4个均等的新的图像区域,然后使用步骤3中的方法对新划分的4个图像区域提取特征点,最多得到4个均匀的特征点,最后将这些特征点映射到原始图像上;
[0022]
其中图像特征点均匀分布评价标准具体按以下步骤实施:
[0023]
步骤1,设计模板:若分辨率为w
×
h的图像上存在n个特征点,其模板情况为n个点均匀的分布在整张图像上,任意特征点与其最近近邻的特征点之间距离为d,d的计算根据公式(2),式中d=2*r,h表示图像的像素高,w表示图像的像素宽:
[0024][0025]
步骤2,遍历实际提取得到的每一个特征点,并寻找每一个特征点与其最近邻的特征点,计算他们之间的像素距离,再使用公式(3)计算得到特征点均匀分布系数c,xi表示第i个特征点与其最近邻特征点之间的像素距离,c的值越小均匀性越好,越接近1均匀性越差:
[0026][0027]
本发明的有益效果是:
[0028]
本发明提取出的基于图像划分的快速均匀的特征点提取方法,首先根据目标提取特征点个数将图像划分,再同时对多个图像块并行提取fast角点特征。最终,在保证耗费较低计算时间的同时得到了均匀分布于图像上的特征点,这些特征点无冗余,且充分保留了图像特征信息。本发明提出的图像特征点均匀分布评价标准,通过设计最优分布模型,再将实际分布情况与模型进行对比计算得到均匀性分布系数,这种方法即考虑了特征点在整个图像上是否均匀分布,同时也考虑了特征点之间是否均匀分布。这是一种同时考虑全局均匀与局部均匀的特征点均匀性评价标准。
附图说明
[0029]
图1为本发明的一种基于图像划分的快速均匀的特征点提取方法中实施例提供的特征点提取流程图;
[0030]
图2为本发明的一种基于图像划分的快速均匀的特征点提取方法中实施例提供的均匀特征点提取示意图;
[0031]
图3为本发明的一种基于图像划分的快速均匀的特征点提取方法中实施例提供的图像金字塔示意图;
[0032]
图4为本发明的一种基于图像划分的快速均匀的特征点提取方法中实施例提供的特征点均匀分布模板示意图;
[0033]
图5为本发明的一种基于图像划分的快速均匀的特征点提取方法中使用本技术方法、orb特征提取方法和四叉树均匀提取方法得到的特征点提取结果。
具体实施方式
[0034]
下面结合附图和具体实施方式对本发明进行详细说明。
[0035]
本发明提供了一种基于图像划分的快速均匀的特征点提取方法主要分为两大部分,第1部分为基于图像划分的快速均匀的特征点提取方法,第2部分为图像特征点均匀分布评价标准。
[0036]
其中基于图像划分的快速均匀的特征点提取方法具体按以下步骤实施:
[0037]
本技术提出的基于目标特征数量的网格均匀化特征检测方法,使用目标特征数量对图像进行网格划分,同时结合四叉树均匀化的思想,并在特征提取时采用多线程进行提速,算法的主要流程如图1所示;
[0038]
步骤1,根据目标提取特征点个数,将图像划分为与目标特征点个数一致的矩形区域;
[0039]
步骤2,构建图像金字塔,目标图像采用缩放因子为0.8,构建最高层数为3的图像金字塔,得到如图3所示的图像金字塔,第0层表示原始目标图像;
[0040]
步骤3,将图像划分后的各个图像块映射到图像金字塔中,每个图像块得到独立的块图像金字塔,如图2所示,采用并行的检测手段同时对多个区域的块图像金字塔从底向上提取fast特征点,当某个区域检测到第一个特征点后立即结束此区域的提取任务;
[0041]
步骤4:将所有提取的特征点映射到原始图像上;
[0042]
步骤5:原始图像块自左向右,自上向下排序,对于没有检测到特征点的图像块,找到该图像块的下一个提取到特征点的图像块,将该图像块划分为4个均等的图像区域,然后使用步骤3中的方法对新划分的4个图像区域提取特征点,最多得到4个均匀的特征点,最后将这些特征点映射到原始图像上,最终结果如图2所示;
[0043]
上述方法中,步骤3对每个划分的图像区域提取一个目标特征点,但是也会存在该区域不存在特征点的情况;步骤5针对步骤3中存在的不足,使用四叉树均匀化的思想,做一个补偿性的特征点提取,保证实际得到的特征点数尽可能接近目标点数量。
[0044]
其中图像特征点均匀分布评价标准具体按以下步骤实施:
[0045]
若要使n个特征点均匀的分布在一张图像上,最佳的方案是n个半径为r的圆形布满整个图像,特征点分布在每个圆形的圆点位置,将这种特征点分布情况称为模板分布,模板示意图见图5;本技术的图像特征点均匀分布评价标准,具体步骤如下:
[0046]
步骤1,设计模板:若分辨率为w
×
h的图像上存在n个特征点,其模板情况为n个点均匀的分布在整张图像上,任意特征点与其最近近邻的特征点之间距离为d,d的计算根据公式(2),模板分布如图4所示,其中d=2*r,h表示图像的像素高,w表示图像的像素宽;
[0047][0048]
步骤2,遍历实际提取得到的每一个特征点,并寻找每一个特征点与其最近邻的特征点,计算他们之间的像素距离,再使用公式(3)计算得到特征点均匀分布系数c,xi表示第i个特征点与其最近邻特征点之间的像素距离,c的值越小均匀性越好,越接近1均匀性越差。
[0049][0050]
本技术采用实际特征点分布情况与最佳分布情况(模板情况)之间的差别计算得到特征点均匀分布系数,这种评价方式同时兼顾特征点在整个图像上的均匀分布和特征点之间的均匀分布情况。
[0051]
实验均采用nvidia jetson tx2嵌入式计算机模块作为计算平台,分别使用orb特征提取方法、四叉树均匀化方法和本发明方法提取图像特征点,首先对时间效率进行对比分析,再使用本发明的均匀特征点评价标准对三种方法提取的特征点进行比较分析;实验采用tum的单目视觉里程计数据集中的序列14、序列21、序列30和序列47,共4个视频序列进行实验验证。首先使用数据集提供的参数对数据集进行畸变矫正,得到图像分辨率为640*480的去畸变图像,然后再进行特征提取与匹配的相关实验;序列14为室内场景,有较强的曝光影响,会直接影响特征点分布均匀性;序列21为户外森林场景,序列30为户外校园场景,序列47为街区场景,这3个序列较序列14而言特征分布较为均匀;
[0052]
图5是目标提取特征点个数为300时,3种方法分别在室内场景、街区场景和森林场景下提取特征点的结果;orb特征点提取方法均匀性最差,特征点冗余,无法准确的描述图像空间信息;四叉树均匀化方法得到的特征点在整个图像上呈现均匀分布,但是存在局部密集的现象;本发明方法提取结果最优,特征点分布均匀,充分突出了图像特征信息。
[0053]
表1是采用本发明的基于特征点间距离的均匀性评测方法对3种特征提取方法进行评估,首先分别在4类场景的数据集中提取50、100和300个特征点,再计算平均每帧的均匀性系数;其中本发明方法表现最优,四叉树均匀化方法次之,不做任何均匀性处理的orb特征提取方法效果最差,与图5中的结果保持一致;3种方法在序列14上提取特征点的均匀性系数要比在其它序列场景中得到的均匀性系数略高,是由于序列14中有较多图像中存在过度曝光或曝光不足的问题,会导致受曝光影响的图像区域丢失信息,无法提取到特征点,出现特征点非均匀分布的现象。
[0054]
表1 均匀性系数
[0055]
[0056][0057]
表2是目标提取特征点个数为分别为50、100和300时,分别使用3种方法在4种场景的视频序列进行测试,得到的平均每一帧的处理耗时;本发明方法平均耗时最短,orb特征提取平均耗时最长。orb特征提取首先提取fast特征点,然后使用harries对特征点进行选择,耗时最长;四叉树均匀化方法需要根据对图像区域进行动态划分,并选择图像区域内的最优点,也需要花费大量时间;fufp根据目标特征点数划分图像,再采用并行提取的方法,耗费时间最短。
[0058]
表2 特征提取平均每帧耗时(ms)
[0059]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1