基于变参时频流形信号重构的旋转机械微弱故障检测方法
1.本发明涉及故障检测领域,具体涉及一种基于变参时频流形信号重构的旋转机械微弱故障检测方法。
背景技术:
2.振动监测技术常用于旋转机械故障诊断中,通过对振动信号的分析可以监测旋转机械的运行状态并及时发现故障,有利于减少停机时间、确保高效生产。当旋转机械在定转速下发生局部故障时,振动信号中会出现周期性瞬态脉冲成分,但由于复杂的机械结构和工作环境,瞬态脉冲往往淹没在大量噪声中,使故障信息在振动信号中显得十分微弱,给机械故障检测带来了挑战。因此,从振动信号中提取故障瞬态脉冲成分是实现旋转机械微弱故障检测的关键。
3.时频变换方法,如短时傅里叶变换(stft),可以将一维的时域振动信号转换成时频域中的时频分布(tfd),常用于提取故障瞬态脉冲的时频模式,即特定频带内周期性出现的脉冲区域。然而,噪声也会分布在振动信号的tfd中,干扰了故障瞬态脉冲的识别。传统的去噪方法仅起到带通滤波的效果,即只能去除故障所在频带以外的噪声,对故障频带内的噪声(即带内噪声)则无法去除。
4.时频流形(tfm)是一种旨在去除时频域中故障带内噪声的方法,通过流形学习非线性提取嵌入在高维tfd中的内在流形结构,在保留故障瞬态脉冲的同时减弱故障带内噪声。tfm的具体步骤为:1)采用相空间重构(psr)把一维振动信号转换到高维空间;2)利用时频变换对高维空间中的每一维信号进行处理,获得高维tfd;3)对高维tfd进行流形学习,获得低维的tfm特征。
5.传统技术存在以下技术问题:
6.tfm在一定程度上减弱了信号时频分布中的故障带内噪声,但是还存在以下缺点:1)时频变换的参数由人为选定,不具有对不同信号的普适性;2)高维tfd数据量较大,对其进行流形学习的计算负担重;3)流形学习的近邻点参数需要优化,增加了计算负担;4)tfm特征中仍然残留了少部分故障带内噪声;5)tfm特征仅反映了故障瞬态脉冲的内在时频流形结构,其幅值与信号的tfd相差甚远,不能用于机械故障严重程度的定量分析。
技术实现要素:
7.本发明要解决的技术问题是提供一种基于变参时频流形信号重构的旋转机械微弱故障检测方法,该方法针对tfm存在的问题,提出具有对信号普适性的变参时频变换方法构造高维tfd,并把获得的两维tfm特征进行自适应阈值去噪,最后把去噪后的tfm特征作为时频特征基重构时域信号。本发明方法能够极大地去除振动信号中的噪声,在提取故障瞬态脉冲流形结构的同时,也能恢复其幅值,从而实现旋转机械微弱故障的精确检测。
8.为了解决上述技术问题,本发明提供了一种基于变参时频流形信号重构的旋转机械微弱故障检测方法,包括:
9.步骤(1)、故障带内成分提取:采用传统信号处理方法从信号中提取故障所在频带内的成分;
10.步骤(2)、高维tfd矩阵构造:对故障带内成分进行变参时频变换,对获得的每个tfd进行降采样并转换为列向量,用于构造高维tfd矩阵;
11.步骤(3)、tfm特征提取:对高维tfd矩阵进行流形学习,获得两维tfm特征;
12.步骤(4)、tfm特征去噪:根据两维tfm特征的联合幅值分布确定阈值,将两维tfm特征中低于阈值的幅值置零,获得去噪后的两维tfm特征;
13.步骤(5)、故障成分tfd重构:把去噪后的两维tfm特征按照给定的权重进行加权求和,对得到的一维向量反变换为二维矩阵,得到重构的故障成分tfd;
14.步骤(6)、故障成分时域信号重构:把重构的故障成分tfd上采样到原始尺寸,借用故障带内成分tfd对应的相位信息,通过逆时频变换重构故障成分时域信号;
15.其中,步骤(1)中,所述传统信号处理方法能够确定故障信息所在的频带位置并提取出其中的信号成分,滤除故障频带以外的噪声。
16.在其中一个实施例中,所述步骤(1)中,所述传统信号处理方法包括峭度谱、稀疏谱、信息谱、经验模态分解、变分模态分解、经验小波变换、小波变换和小波包变换。
17.在其中一个实施例中,所述步骤(2)中,所述变参时频变换采用不同的参数对信号进行时频变换,所述变参时频变换方法包括短时傅里叶变换、小波变换和维格纳-威利分布;所述降采样是能够减少数据量的方法,包括下采样、二维离散小波变化、二维离散余弦变换、二维经验模态分解和二维变分模态分解。
18.在其中一个实施例中,所述步骤(3)中,所述流形学习是具有维数约简功能的方法,所述流形学习包括局部切空间排列算法、等距映射算法、局部线性嵌入算法、拉普拉斯特征映射算法和局部保留投影算法。
19.在其中一个实施例中,所述步骤(4)中,所述两维tfm特征的联合幅值分布是指把各数据点对应的第一维tfm特征作为横坐标、第二维tfm特征作为纵坐标,该图呈对勾状,对勾的左下部分中的点为噪声点,右上部分中的点为故障脉冲点;所述阈值是区分噪声点和故障脉冲点的临界点。
20.在其中一个实施例中,所述步骤(5)中,所述给定的权重能够把重构的故障成分tfd的幅值达到所述步骤(2)中故障带内成分tfd的幅值水平,权重获取方法包括采用高维tfd矩阵中所有维数据的均值或者其中一维数据,分别与去噪后的两维tfm特征进行数学运算得到,所述数学运算方法包括计算欧式距离、内积和余弦相似度;所述重构的故障成分tfd的尺寸与故障带内成分tfd经过降采样后的尺寸相同。
21.在其中一个实施例中,所述步骤(6)中,所述上采样是所述步骤(2)中所述降采样的逆变换;所述原始尺寸是所述步骤(2)中故障带内成分tfd的尺寸;所述故障带内成分tfd对应的相位信息是所述步骤(2)中故障带内成分在其中一个参数下经过时频变换得到的所有时频点的相位;所述逆时频变换是所述步骤(2)中时频变换的逆变换;其中,对重构信号做包络谱分析,通过是否识别旋转机械故障特征频率来检测是否存在故障。
22.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现任一项所述方法的步骤。
23.一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现
任一项所述方法的步骤。
24.一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行任一项所述的方法。
25.本发明的有益效果:
26.与现有技术相比,本发明公开了一种基于变参时频流形信号重构的旋转机械微弱故障检测方法;本发明采用不同参数下的时频变换方法构造高维tfd,可以提高对不同信号的普适性;对高维tfd降采样后再进行流形学习,可以减小流形学习的计算负担;自适应选择阈值对tfm特征进行去噪,可以较为彻底地去除残留噪声,且对流形学习的近邻点参数具有鲁棒性,无需优化近邻点参数,进一步提高了方法的计算效率;重构信号恢复了故障瞬态脉冲成分的幅值,可以用于对故障严重程度进行定量分析。该技术方法至少具有以下优点:对不同机械振动信号的普适性好、计算效率高、信噪比高、能够定量分析故障严重程度等。
附图说明
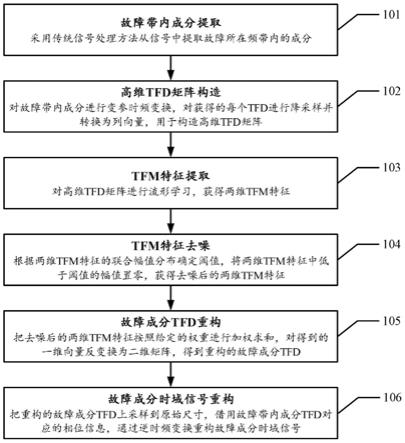
27.图1为本发明实施例公开的一种基于变参时频流形信号重构的旋转机械微弱故障检测方法流程图。
28.图2为本发明实施例提供的磨损故障齿轮箱振动信号的(a)时域波形图、(b)功率谱图和(c)基于stft的tfd。
29.图3为采用vmd从图2所述信号中提取的故障带内成分的三个变参tfd。
30.图4为通过下采样方法对图3所述tfd的纵向数据进行降采样之后的三个变参tfd。
31.图5为对图4所述的高维tfd进行流形学习后得到的两维tfd特征。
32.图6为图5所述两维tfd特征的联合幅值分布图。
33.图7为对图5所述两维tfd特征进行阈值去噪后的两维tfd特征。
34.图8为利用图7所述去噪后的两维tfd特征重构的(a)故障成分tfd和(b)时域信号及其(c)包络谱图。
具体实施方式
35.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
36.参阅图1,一种基于变参时频流形信号重构的旋转机械微弱故障检测方法,该技术具体包括:
37.步骤101:故障带内成分提取:采用传统信号处理方法从信号中提取故障所在频带内的成分。
38.传统信号处理方法是常用的信号去噪方法,可以确定故障信息所在的频带位置并提取出其中的信号成分,滤除故障频带以外的噪声,这些方法包括但不限于峭度谱(kurtogram)、稀疏谱(sparsogram)、信息谱(infogram)、经验模态分解(emd)、变分模态分解(vmd)、经验小波变换(ewt)、小波变换(wt)、小波包变换(wpt)等。
39.步骤102:高维tfd矩阵构造:对故障带内成分进行变参时频变换,对获得的每个tfd进行降采样并转换为列向量,用于构造高维tfd矩阵。
40.变参时频变换采用不同的参数对信号进行时频变换,所述变参时频变换方法包括
但不限于短时傅里叶变换(stft)、小波变换(wt)、维格纳-威利分布(wvd)等。降采样是能够减少数据量的方法,包括但不限于下采样、二维离散小波变化(2d-dwt)、二维离散余弦变换(2d-dct)、二维经验模态分解(bemd)、二维变分模态分解(bvmd)等。
41.步骤103:tfm特征提取:对高维tfd矩阵进行流形学习,获得两维tfm特征。
42.流形学习是具有维数约简功能的方法,包括但不限于局部切空间排列算法(lsta)、等距映射算法(isomap)、局部线性嵌入算法(lle)、拉普拉斯特征映射算法(le)、局部保留投影算法(lpp)等。
43.步骤104:tfm特征去噪:根据两维tfm特征的联合幅值分布确定阈值,将两维tfm特征中低于阈值的幅值置零,获得去噪后的两维tfm特征。
44.两维tfm特征的联合幅值分布是指把各数据点对应的第一维tfm特征作为横坐标、第二维tfm特征作为纵坐标,该图呈对勾(√)状,对勾的左下部分中的点为噪声点,右上部分中的点为故障脉冲点。阈值是区分噪声点和故障脉冲点的临界点。
45.步骤105:故障成分tfd重构:把去噪后的两维tfm特征按照给定的权重进行加权求和,对得到的一维向量反变换为二维矩阵,得到重构的故障成分tfd。
46.给定的权重可以把重构的故障成分tfd的幅值达到步骤102中故障带内成分tfd的幅值水平,权重获取方法包括但不限于采用高维tfd矩阵中所有维数据的均值或者其中一维数据,分别与去噪后的两维tfm特征进行数学运算得到,数学运算方法包括但不限于计算欧式距离、内积、余弦相似度等。重构的故障成分tfd的尺寸与故障带内成分tfd经过降采样后的尺寸相同。
47.步骤106:故障成分时域信号重构:把重构的故障成分tfd上采样到原始尺寸,借用故障带内成分tfd对应的相位信息,通过逆时频变换重构故障成分时域信号。
48.上采样是步骤102中降采样的逆变换。原始尺寸是步骤102中故障带内成分tfd的尺寸。故障带内成分tfd对应的相位信息是步骤102中故障带内成分在其中一个参数下经过时频变换得到的所有时频点的相位。逆时频变换是步骤102中时频变换的逆变换。对重构信号做包络谱分析,通过是否识别旋转机械故障特征频率来检测是否存在故障。
49.下面给出本发明的一个具体应用场景:
50.为了更加清楚地了解本发明的技术方案及其效果,下面结合一个具体的实施例进行详细说明。
51.以齿轮箱磨损故障检测为例。该齿轮箱是具有5个前进挡和1个后退挡的汽车传动齿轮箱。把齿轮箱挂到第三前进挡,其啮合频率为500hz,被测试的主动齿轮和从动齿轮的旋转频率分别为20hz和18.5hz。加速计安装在齿轮箱的外壳上,用3khz的采样频率收集振动信号。磨损故障出现在主动齿轮上,故齿轮的故障特征频率为fd=20hz.
52.参考附图2,图2是本发明实施例提供的磨损故障齿轮箱的时域波形图、功率谱图和基于stft的tfd。stft的参数为窗长=65,窗移动步长=5,计算傅里叶变换的数据点数=128。波形图中齿轮故障瞬态脉冲淹没在噪声中。功率谱图中500hz处频率幅值最高,但尚未被调制,在200hz~360hz范围内有调制现象,是故障频带,但带内存在噪声。tfd中在200hz~360hz范围内观察到周期性的故障瞬态脉冲区域,但噪声也较大,有些噪声会被误识别成故障脉冲。
53.采用本发明公开的技术对图2所述信号进行处理。故障特征成分提取方法为vmd,
变参时频变换方法为stft,其窗长的选取范围为[50,80],从中均匀选择11个值对故障特征成分进行处理,得到11个tfd,其中窗长为50、65和80的tfd如图3所示。可以看出,vmd虽然可以去除大部分故障频带以外的噪声,但无法去除带内噪声。此外,不同窗长下的tfd的幅值有差异,时频分辨率也有差异(体现在故障脉冲区域的形状差异上)。采用下采样方法对11个tfd的纵向数据进行比例为1:4的降采样,图3所示的tfd经过降采样后的tfd如图4所示,其中的故障脉冲和噪声已经难以区分。
[0054]
11个降采样的tfd分别转化为列向量后,可以构造11维tfd矩阵。采用ltsa对其进行流形学习,近邻点数为15,得到维数为2的tfm特征,每维tfm特征转化为时频图后如图5所示。tfm特征保留了故障脉冲,但带内还残存有噪声,第二维tfm特征中还增加了带外噪声,两维tfm特征的幅值相比于tfd的幅值减小了两个数量级。
[0055]
两维tfm特征的联合幅值分布图如图6所示。以最左端数据点的纵坐标为第二维tfm特征的阈值,用该阈值在图中画横线,其与对勾的第二个交点的横坐标是第一维tfm特征的阈值。通过阈值去噪后的两维tfm特征如图7所示,其中的噪声全部被去除,故障脉冲得到保留。
[0056]
为恢复其幅值,对去噪后的两维tfm特征进行加权求和,加权系数分别为11维tfd的均值与两个tfm特征的欧氏距离,对所得时频图的纵向数据进行比例为4:1的上采样,得到故障成分tfd,如图8(a)所示,其幅值已恢复到图3所示tfd的同一数量级,且保留了故障脉冲,去除了所有的噪声。
[0057]
利用图3所示中间的tfd的相位信息,对故障成分tfd进行短时傅里叶逆变换,得到重构的故障成分时域信号,如图8(b)所示,其幅值与图2所示的时域波形图相当,说明本发明方法可以准确恢复故障成分的幅值。图8(c)是重构的故障信号的包络谱,可以识别故障特征频率fd及其二次和三次谐波,从而准确检测出齿轮箱第三档主动齿轮的微弱故障。
[0058]
综上所述,通过对齿轮箱振动信号进行变参时频变换可以提高对不同信号的普适性,对高维tfd进行降采样可以减小计算负担,根据两维tfm特征的联合幅值分布确定阈值可以提高阈值选择的自适应性和对不同流形学习近邻点数的鲁棒性,对两维tfm特征进行加权求和并进行时频逆变换可以分别重构故障成分的tfd和时域信号,恢复提取的故障成分的幅值,从而有效检测出齿轮箱微弱故障。本发明方法克服了现有tfm技术需要人工选择时频变换参数和优化流形学习近邻点参数、流形学习计算效率低、tfm特征残存有噪声和幅值失真的问题,具有对不同机械振动信号的普适性好、计算效率高、信噪比高、能够定量分析故障严重程度等优点,对旋转机械微弱故障的有效检测具有重要意义。
[0059]
以上所述实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1