一种道路边界分类方法及其装置、计算机设备、移动工具与流程
1.本发明涉及无人驾驶技术领域,特别是涉及一种道路边界分类方法,一种道路边界分装置,一种计算机设备,一种移动工具。
背景技术:
2.无人驾驶技术中地图的采集,常常需要对道路边界类型进行分类,用于决策车辆是否可以通行或穿越。由于地图采集工作量巨大,道路边界信息丰富,因此,如果能够快速、准确地区分道路边界类型,可以大大提高地图采集效率,降低成本。
3.目前,在无人驾驶的地图采集工作中,对道路边界类型的区分,多采用人工分类,即通过肉眼观察图像中道路边界特征,人工对道路类型进行区分并在地图中进行相应标注。
4.这种人工分类的方式,由于通过肉眼观察图像中道路边界特征,人工对地图中边界类型进行区分和标注,效率较低,需要大量的人力成本,且速度较慢。
5.此外,人工肉眼观察道路边界特征,来进行道路类型区分并标注,不可避免地存在分类的错误和误标注的问题,而且道路边界场景特征复杂,各种类型的道路特征存在模糊情况,不同人理解道路类型情况也会存在差别,最终导致人工标注出的道路类型准确度会下降,从而在一定程度上会影响到自动驾驶车辆在路面上的安全可靠运行。
技术实现要素:
6.本发明的目的是针对现有技术存在的技术缺陷,提供一种道路边界分类方法,一种道路边界分装置,一种计算机设备,一种移动工具。
7.为此,本发明第一方面,提供了一种道路边界分类方法,包括以下步骤:
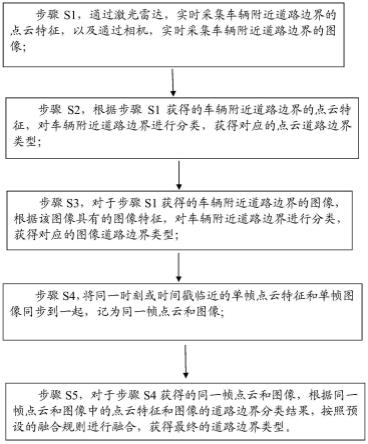
8.步骤s1,通过激光雷达,实时采集车辆附近道路边界的点云特征,以及通过相机,实时采集车辆附近道路边界的图像;
9.步骤s2,根据步骤s1获得的车辆附近道路边界的点云特征,对车辆附近道路边界进行分类,获得对应的点云道路边界类型;
10.步骤s3,对于步骤s1获得的车辆附近道路边界的图像,根据该图像具有的图像特征,对车辆附近道路边界进行分类,获得对应的图像道路边界类型;
11.步骤s4,将同一时刻或时间戳的单帧点云特征和单帧图像同步到一起,记为同一帧点云和图像;
12.步骤s5,对于步骤s4获得的同一帧点云和图像,根据同一帧点云和图像中的点云特征和图像的道路边界分类结果,按照预设的融合规则进行融合,获得最终的道路边界类型。
13.优选地,在步骤s1中,激光雷达朝向车辆的前方,通过激光雷达采集车辆前方道路边界的点云特征,以及相机朝向车辆的前方,通过相机采集车辆前方道路边界的图像。
14.优选地,在步骤s2中,当步骤s1获得的车辆附近道路边界的点云信息具有的点云
特征是预设明显的高路沿点云特征时,将车辆附近道路边界的类型划分为点云b类道路边界;
15.预设明显的高路沿点云特征,即对于激光雷达所采集的车辆附近道路边界的点云特征,其包括一条路沿分界线;
16.对于路沿分界线,路沿分界线两侧点云的高度差在预设差值区间内;
17.点云b类道路边界为高路沿类的点云道路边界。
18.优选地,在步骤s2中,当步骤s1获得的车辆附近道路边界的点云信息具有的点云特征不是预设明显的高路沿点云特征时,将车辆附近道路边界划分为点云ac混合类道路边界;
19.预设明显的高路沿点云特征,即对于激光雷达所采集的车辆附近道路边界的点云特征,其包括一条路沿分界线;
20.对于路沿分界线,路沿分界线两侧点云的高度差在预设差值区间内;
21.点云ac混合类道路边界,是涵盖点云a类道路边界和点云c类道路边界两种类型的点云道路边界。
22.优选地,在步骤s3中,图像道路边界类型,包括图像a类道路边界、图像b类道路边界和图像c类道路边界;
23.其中,图像a类道路边界,是低矮灌木丛类的图像道路边界;
24.图像b类道路边界,是高路沿类的图像道路边界;
25.图像c类道路边界,是平整草坪类的图像道路边界。
26.优选地,在步骤s5中,具体的预设的融合规则如下:
27.对于同一帧点云和图像中的点云特征和图像,当点云特征的道路边界分类结果为点云b类道路边界,并且,图像的道路边界分类结果是图像a类道路边界、图像b类道路边界和图像c类道路边界中的任意一种时,融合后获得的最终的道路边界类型为:b类最终道路边界,即为高路沿类的最终道路边界;
28.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像a类道路边界时,融合后获得的最终的道路边界类型为:a类最终道路边界,即为低矮灌木丛类的最终道路边界;
29.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像b类道路边界时,融合后获得的最终的道路边界类型为:不确定类道路边界;
30.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像c类道路边界时,融合后获得的最终的道路边界类型为:c类最终道路边界,即为平整草坪类的道路边界。
31.优选地,在步骤s5中,还包括以下步骤:
32.当融合后获得的最终的道路边界类型为不确定类道路边界时,输出对应的同一帧点云和图像,进行人工分类。
33.本发明第二方面,还提供一种道路边界分类装置,包括以下模块:
34.激光雷达,用于实时采集车辆附近道路边界的点云特征,然后发送给第一道路边界分类模块和数据同步模块;
35.相机,用于实时采集车辆附近道路边界的图像,然后发送给第二道路边界分类模块和数据同步模块;
36.第一道路边界分类模块,与激光雷达相连接,用于根据激光雷达发来的车辆附近道路边界的点云特征,对车辆附近道路边界进行分类,获得对应的点云道路边界类型;
37.第二道路边界分类模块,与相机相连接,用于对相机发来的车辆附近道路边界的图像,根据该图像具有的图像特征,对车辆附近道路边界进行分类,获得对应的图像道路边界类型;
38.数据同步模块,分别与激光雷达和相机相连接,用于将激光雷达和相机发来的同一时刻或时间戳的单帧点云信息和单帧图像信息同步到一起,记为同一帧点云和图像,然后将同一帧点云和图像发送给分类结果融合模块;
39.分类结果融合模块,分别与第一道路边界分类模块和第二道路边界分类模块相连接,用于接收所述数据同步模块获得的同一帧点云和图像,根据同一帧点云和图像中的点云特征和图像的道路边界分类结果,按照预设的融合规则进行融合,获得最终的道路边界类型。
40.优选地,分类结果融合模块,还用于当融合后获得的最终的道路边界类型为不确定类道路边界时,输出对应的同一帧点云和图像,以进行人工分类。
41.本发明第三方面,还提供一种计算机设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现第一方面所述的道路边界分类方法。
42.本发明第四方面,还提供一种移动工具,包括第三方面所述的计算机设备。
43.由以上本发明提供的技术方案可见,与现有技术相比较,本发明提供了一种道路边界分类方法,一种道路边界分装置,一种计算机设备,一种移动工具。本发明设计科学,通过激光雷达点云和相机图像分别进行道路边界的分类,然后融合二者分类结果,从而自动得到道路边界的类型,实现自动进行道路边界分类,因此,能够显著降低人力成本,明显提升采集地图的效率,具有重大的实践意义。
44.对于本发明,能够有效避免人工区分和标注地图中的道路边界类型所产生的错误和误差,降低了人工标注中不同人的理解偏差所带来的分类错误,大大提高了对地图中道路边界类型区分理解的准确度。
附图说明
45.图1为本发明提供的一种道路边界分类方法的整体工作流程图;
46.图2a、图2b分别是激光雷达和相机采集到的点云特征图和图像;
47.图3为高路沿类的点云道路边界(即点云b类道路边界)对应的点云特征图;
48.图4a、图4b分别为点云a类道路边界(即低矮灌木丛类的点云道路边界)和点云c类道路边界(即平整草坪类的点云道路边界)分别对应的点云特征图;
49.图5a、图5b和图5c,分别是本发明实例中图像a类道路边界、图像b类道路边界和图像c类道路边界这三种类型边界场景对应的图像。
具体实施方式
50.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和实施方式对本发明作进一步的详细说明。
51.应当理解,给出这些实施方式仅仅是为了使本领域技术人员能够更好地理解进而实现本技术,而并非以任何方式限制本技术的范围。相反,提供这些实施方式是为了使本公开更加透彻和完整,并且能够将本公开的范围完整地传达给本领域的技术人员。
52.本领域技术人员知道,本技术的实施方式可以实现为一种系统、装置、设备、方法或计算机程序产品。因此,本公开可以具体实现为以下形式,即:完全的硬件、完全的软件(包括固件、驻留软件、微代码等),或者硬件和软件结合的形式。
53.为了便于理解,以下对本技术涉及的技术术语进行解释:
54.本技术所称的移动工具可以包括但不限于国际自动机工程师学会(society of automotive engineers international,sae international)或中国国家标准《汽车驾驶自动化分级》制定的l0-l5共六个自动驾驶技术等级的车辆。
55.在一些可以实现的方式中,移动工具可以是具有如下各种功能的车辆设备或机器人设备:
56.(1)载人功能,如家用轿车、公共汽车等;
57.(2)载货功能,如普通货车、厢式货车、甩挂车、封闭货车、罐式货车、平板货车、集装厢车、自卸货车、特殊结构货车等;
58.(3)工具功能,如物流配送车、自动导引运输车agv、巡逻车、起重机、吊车、挖掘机、推土机、铲车、压路机、装载机、越野工程车、装甲工程车、污水处理车、环卫车、吸尘车、洗地车、洒水车、扫地机器人、送餐机器人、导购机器人、割草机、高尔夫球车等;
59.(4)娱乐功能,如娱乐车、游乐场自动驾驶装置、平衡车等;
60.(5)特殊救援功能,如消防车、救护车、电力抢修车、工程抢险车等。
61.参见图1至图5c,本发明提供了一种道路边界分类方法,包括以下步骤:
62.步骤s1,通过激光雷达,实时采集车辆附近道路边界的点云特征,以及通过相机,实时采集车辆附近道路边界的图像;
63.在步骤s1中,需要说明的是,激光雷达的点云特征,每一个点都包含了三维坐标信息,也就是常说的x、y、z三个坐标元素,有时还包含颜色信息、反射强度信息、回波次数信息等。
64.在步骤s1中,具体实现上,激光雷达优选为采用16线激光雷达,并且本发明包括且不仅限于16线激光雷达。
65.在步骤s1中,具体实现上,相机优选为采用广角高清相机,并且本发明包括且不仅限于广角高清相机。
66.在步骤s1中,具体实现上,激光雷达朝向车辆的前方,通过激光雷达,优选为采集车辆前方道路边界的点云特征,以及相机朝向车辆的前方,通过相机,优选为采集车辆前方道路边界的图像。参见图2a、图2b所示,图2a、图2b分别是激光雷达和相机采集到的点云特征和图像。
67.在步骤s1中,具体实现上,相机的安装方式,以相机朝向前方为例,并且本发明包括且不仅限于相机安装朝向前方的方式。
68.步骤s2,根据步骤s1获得的车辆附近道路边界的点云特征,对车辆附近道路边界进行分类,获得对应的点云道路边界类型;
69.在步骤s2中,具体实现上,道路边界分类范围,以车辆右前方道路边界为例,本发明包括且不仅限于对车辆右前方道路边界进行分类。
70.在步骤s2中,具体实现上,当步骤s1获得的车辆附近道路边界的点云特征是预设明显的高路沿点云特征时,将车辆附近道路边界的类型划分为点云b类道路边界;
71.参见图3,预设明显的高路沿点云特征,即对于激光雷达所采集的车辆附近道路边界的点云特征,其包括一条路沿分界线(如图3所示的a线,即是点云分界线);
72.对于激光雷达采集车辆附近道路边界的点云特征,其中的路沿分界线a,路沿分界线a的两侧点云的高度差在预设差值区间内;路沿分界线a的两侧点云的高度差优选在10cm~40cm之间。
73.例如,该线条一侧的点云的高度都在预设第一高度区间内,另一侧的点云的高度都在预设第二高度区间内;预设第一高度区间的最大值,小于预设第二高度区间的最小值;也就是说,点云分界线一侧的点云都在一个几乎相同的高度上,另一侧的点云几乎都在另一个相同的高度上。具体实现上,第二高度区间最大值,与预设第一高度区间最小值的差值(即高度差)在预设差值区间内(例如10cm~40cm,这是通常路沿的垂直方向高度)。
74.点云b类道路边界为高路沿类的点云道路边界,是不可逾越且激光雷达可识别的边界,例如具有明显的高路沿的边界。
75.需要说明的是,点云属性中包括类点云每个点的位置(x,y,z)、反射强度等特征信息,在道路边界分类任务中所获取的点云特征,即为点云分布特征(即点云高度特征),本发明通过点云分布特征(即高度特征)来对路沿进行分类。
76.参见图3所示,对于点云b类道路边界,点云特征较为明显,可以稳定准确地输出b类结果。点云b类道路边界对应的点云特征如图3所示,图3中以高路沿为例,道路边界的点云特征明显,从而能够稳定准确地分类输出对应的道路边界类型,即分类输出点云b类道路边界。
77.在步骤s2中,具体实现上,当步骤s1获得的车辆附近道路边界的点云特征不是预设明显的高路沿点云特征时,将车辆附近道路边界划分为点云ac混合类道路边界;
78.需要说明的是,不具有明显的高路沿点云特征,即点云分布较为错落杂乱,不具有上述b类道路边界点云特征的情况。
79.点云ac混合类道路边界,是涵盖点云a类道路边界和点云c类道路边界两种类型的点云道路边界,无法具体区分道路边界是点云a类道路边界还是点云b类道路边界;
80.其中,点云a类道路边界为低矮灌木丛类的点云道路边界,是不可逾越且激光雷达不可识别的边界(例如矮路沿或灌木丛等的边界);
81.点云c类道路边界为平整草坪类的点云道路边界,是可逾越的边界(逾越无严重风险)。
82.需要说明的是,对于点云a类道路边界和点云c类道路边界,这两类道路边界的点云特征较为复杂,通过点云特征来区分较为困难,因此,对于本发明,将点云a类道路边界和点云c类道路边界暂时划为一类(点云a-c类),即点云ac混合类道路边界。
83.对于本发明,点云a类道路边界和点云c类道路边界分别对应的点云信息,如图4a、
图4b所示,图4a是点云a类道路边界对应的点云特征图,此具体实例中以低矮灌木丛为例,图4b是点云c类道路边界对应的点云特征图,此具体实例中以平整草坪为例。由图4a、图4b可知,点云a类道路边界和点云c类道路边界的点云特征较为类似,因此,通过车辆附近道路边界的点云信息具有的点云特征,无法区分点云a类和点云c类道路边界。
84.需要说明的是,对于本发明,通过激光雷达的点云特征,可以对车辆前方一定范围内的道路边界进行分类。
85.对于本发明,在步骤s2中,具体实现上,根据道路边界的点云特征,可以将道路边界分为三类,点云a类为高路沿类的点云道路边界,是不可逾越且激光雷达不可识别的边界(例如矮路沿或灌木丛等),b类为低矮灌木丛类的点云道路边界,是不可逾越且激光雷达可识别的边界(例如明显的高路沿),c类为平整草坪类的点云道路边界,是可逾越边界(逾越无严重风险)。通过激光雷达点云特征,对车辆前方一定范围内道路边界进行理解(即分类)。
86.需要说明的是,具体实现上,在步骤s2中,将道路边界分为三类仅为示例,本发明应包括且不仅限于将道路边界分为三类。
87.步骤s3,对于步骤s1获得的车辆附近道路边界的图像,根据该图像具有的图像特征,对车辆附近道路边界进行分类,获得对应的图像道路边界类型;
88.在步骤s3中,具体实现上,通过采用深度学习方法(具体为现有的深度学习分类算法),基于图像具有的图像特征,对图像中的道路边界进行特征提取并识别分类。
89.需要说明的是,图像特征是从图像中体现出来的像素特征,就本发明道路边界分类来说,图像特征具体是指:道路边界特征,如高路沿、矮路沿、灌木丛等道路边界的图像特征。
90.在本发明中,设计深度学习分类算法,对道路边界进行分类。具体包括以下操作:
91.首先,预先采集多批包含各类道路边界的图像,并对图像中的各类道路边界进行人工分类标注;
92.然后,用这些具有分类标注的图像数据,对深度学习算法模型(具体采用现有的深度学习算法模型)进行训练;经过训练后的深度学习算法模型,便具有对路沿图像进行分类的能力;
93.然后,对于任意一张输入的图像信息(例如步骤s1获得的车辆附近道路边界的图像信息),经过所述训练后的深度学习算法模型计算,即可得到该图像对应的图像道路边界类型(即路沿的分类类别)。
94.需要说明的是,对于本发明,相机图像边界类型的分类方法,以深度学习分类算法为例,本发明包括且不仅限于深度学习分类方法。
95.在步骤s3中,具体实现上,图像道路边界类型,包括图像a类道路边界、图像b类道路边界和图像c类道路边界;
96.其中,图像a类道路边界,是低矮灌木丛类的图像道路边界;
97.图像b类道路边界,是高路沿类的图像道路边界;
98.图像c类道路边界,是平整草坪类的图像道路边界;
99.如图5a、图5b和图5c所示,三个图分别是本发明实例中的三种类型边界场景的图像,根据这三个图的图像特征进行道路边界分类的结果,分别是低矮灌木丛类(a类)、高路
沿类(b类)和平整草坪类(c类)。基于现有的深度学习分类算法,根据图像信息具有的图像特征,可以较为稳定准确地输出图像道路边界的类别信息。
100.步骤s4,将同一时刻或同一时间戳的单帧点云信息和单帧图像信息同步到一起,记为同一帧点云和图像;因此,可以确保同一帧点云和图像是同一时刻或时间戳采集到的信息,用于道路边界分类的融合;
101.步骤s5,对于步骤s4获得的同一帧点云和图像,根据同一帧点云和图像中的点云特征和图像的道路边界分类结果(即对通过执行步骤s2得到的同一帧点云和图像中的点云特征所对应的点云道路边界类型,以及通过执行步骤s3得到的同一帧点云和图像中的图像所对应的图像道路边界类型),按照预设的融合规则进行融合,获得最终的道路边界类型。
102.需要说明的是,对于本发明,同步为同一帧的点云和图像,代表同一时刻采集到的道路信息,融合二者的分类结果,可以输出最终的边界分类结果。
103.在步骤s5中,具体实现上,具体的预设的融合规则如下:
104.对于同一帧点云和图像中的点云特征和图像,当点云特征的道路边界分类结果为点云b类道路边界,并且,图像的道路边界分类结果是图像a类道路边界、图像b类道路边界和图像c类道路边界中的任意一种时,融合后获得的最终的道路边界类型为:b类最终道路边界,即为高路沿类的最终道路边界;
105.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像a类道路边界时,融合后获得的最终的道路边界类型为:a类最终道路边界,即为低矮灌木丛类的最终道路边界;
106.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像b类道路边界时,融合后获得的最终的道路边界类型为:不确定类道路边界;
107.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像c类道路边界时,融合后获得的最终的道路边界类型为:c类最终道路边界,即为平整草坪类的道路边界。
108.需要说明的是,对于本发明,以上描述的点云特征和图像分类结果的融合方法仅为示例,本发明应包括且不仅限于所描述的点云和图像分类结果的融合方法。
109.在本发明中,具体实现上,在步骤s5中,还可以包括以下步骤:
110.当融合后获得的最终的道路边界类型为不确定类道路边界时,输出对应的同一帧点云和图像,进行人工分类,即对于步骤s4获得的同一帧点云和图像,及时输出,安排人员进行人工分类,从而获得最终的道路边界类型。
111.需要说明的是,当同一帧点云和图像中的点云特征的道路边界分类结果为点云ac混合类道路边界,并且,同一帧点云和图像中的图像的道路边界分类结果是图像b类道路边界时,融合后获得的最终的道路边界类型为:不确定类道路边界;这时候,需要人工进行分类,得到边界类别。
112.在本发明中,具体实现上,在步骤s5之后,还可以包括以下步骤:
113.步骤s6,最终输出道路的分类结果:对不确定类道路边界进行人工分类后,综合融合分类结果,得到最终的道路边界分类结果。
114.基于以上技术方案可知,对于本发明,本发明的道路边界分类方法,通过激光雷达
的点云特征对道路边界进行分类,然后通过相机所采集的图像中的图像特征对道路边界进行分类,二者分类的边界类型进行融合,最终得到道路边界的最终分类结果。
115.在本发明中,总的来说,处理环节包括七部分:激光雷达的点云特征和相机图像的采集,通过激光雷达的点云特征对道路边界进行分类,通过相机图像中的图像特征对道路边界进行分类,激光雷达和相机进行数据同步,将同步到同一帧的二者的分类结果进行融合并输出边界分类融合结果,对融合结果为不确定分类的进行人工分类,最终输出道路的分类结果。
116.对于本发明,利用激光雷达采集的点云特征和相机采集的图像特征分别对道路边界进行分类,融合二者分类结果得到最终的道路边界类型。本发明能够大大降低采集地图中的人力成本,缩短建图时间,提高建图效率。并且避免了人工分类和标注产生的错误和误差,也不存在人工标注中不同人的理解偏差问题,边界理解和标注的准确度显著提高。
117.此外,基于以上本发明提供的一种道路边界分类方法,为了执行上述道路边界分类方法,本发明还提供了一种道路边界分类装置,该装置包括以下模块:
118.激光雷达,用于实时采集车辆附近(例如右前方)道路边界的点云特征,然后发送给第一道路边界分类模块和数据同步模块;
119.相机,用于实时采集车辆附近(例如右前方)道路边界的图像,然后发送给第二道路边界分类模块和数据同步模块;
120.第一道路边界分类模块,与激光雷达相连接,用于根据激光雷达发来的车辆附近道路边界的点云特征,对车辆附近道路边界进行分类,获得对应的点云道路边界类型;
121.第二道路边界分类模块,与相机相连接,用于对相机发来的车辆附近(例如右前方)道路边界的图像,根据该图像具有的图像特征,对车辆附近道路边界进行分类,获得对应的图像道路边界类型;
122.数据同步模块,分别与激光雷达和相机相连接,用于将激光雷达和相机发来的同一时刻或同一时间戳的单帧点云信息和单帧图像信息同步到一起,记为同一帧点云和图像,然后将同一帧点云和图像发送给分类结果融合模块;因此,可以确保同一帧点云和图像是同一时刻或时间戳采集到的信息,用于道路边界分类的融合;
123.分类结果融合模块,分别与第一道路边界分类模块和第二道路边界分类模块相连接,用于接收所述数据同步模块获得的同一帧点云和图像,根据同一帧点云和图像中的点云特征和图像的道路边界分类结果(即根据通过运行第一道路边界分类模块得到的同一帧点云和图像中的点云特征所对应的点云道路边界类型,以及通过运行第二道路边界分类模块得到的同一帧点云和图像中的图像所对应的图像道路边界类型),按照预设的融合规则进行融合,获得最终的道路边界类型。
124.在本发明中,具体实现上,对于分类结果融合模块,具体的预设的融合规则如下:
125.对于同一帧点云和图像中的点云特征和图像,当点云特征的道路边界分类结果为点云b类道路边界,并且,图像的道路边界分类结果是图像a类道路边界、图像b类道路边界和图像c类道路边界中的任意一种时,融合后获得的最终的道路边界类型为:b类最终道路边界,即为高路沿类的最终道路边界;
126.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像a类道路边界时,融合后获得的最终的道路边界类型为:a类最终道路边
界,即为低矮灌木丛类的最终道路边界;
127.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像b类道路边界时,融合后获得的最终的道路边界类型为:不确定类道路边界;
128.当点云特征的道路边界分类结果为点云ac混合类道路边界,并且,图像的道路边界分类结果是图像c类道路边界时,融合后获得的最终的道路边界类型为:c类最终道路边界,即为平整草坪类的道路边界。
129.在本发明中,具体实现上,分类结果融合模块,还用于当融合后获得的最终的道路边界类型为不确定类道路边界时,输出对应的同一帧点云和图像,以进行人工分类,即对于所述数据同步模块获得的同一帧点云和图像,及时输出,以便安排人员进行人工分类,从而获得最终的道路边界类型。
130.需要说明的是,当点云信息的道路边界分类结果为点云ac混合类道路边界,并且,图像信息的道路边界分类结果是图像b类道路边界时,融合后获得的最终的道路边界类型为:不确定类道路边界;这时候,需要人工进行分类,得到边界类别。
131.需要说明的是,对于本发明,对不确定类道路边界进行人工分类后,综合融合分类结果,得到最终的道路边界分类结果。
132.此外,本发明还提供了一种计算机设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现所述道路边界分类方法的步骤。
133.另外,本发明还提供了一种移动工具,包括所述计算机设备。
134.综上所述,与现有技术相比较,本发明提供的一种道路边界分类方法,一种道路边界分装置,一种计算机设备,一种移动工具。本发明设计科学,通过激光雷达点云和相机图像分别进行道路边界的分类,然后融合二者分类结果,从而自动得到道路边界的类型,实现自动进行道路边界分类,因此,能够显著降低人力成本,明显提升采集地图的效率,具有重大的实践意义。
135.对于本发明,能够有效避免人工区分和标注地图中的道路边界类型所产生的错误和误差,降低了人工标注中不同人的理解偏差所带来的分类错误,大大提高了对地图中道路边界类型区分理解的准确度。
136.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1