一种三维场景灾变监控预警方法与流程
1.本发明涉及图像处理技术领域,尤其涉及一种三维场景灾变监控预警方法。
背景技术:
2.泥石流作为一种大规模地质灾害,极具破坏性,一旦发生,往往会带来巨大的经济损失和人员伤亡。因此,快速准确识别泥石流的发生,对于快速采取有效措施、精准制定应对策略有着重要意义。
3.现有技术中,一般通过人工法来进行泥石流灾害的监控预警。人工法是一种宏观的测量方法,依靠技术人员根据多次的现场观测情况进行比对实现,技术人员必须具有丰富的经验,人工检测方法单一,数据误差大,人力成本高。
技术实现要素:
4.本发明提供一种三维场景灾变监控预警方法,通过结合图像识别和激光点云进行泥石流灾害的监控预警,能够在提高精度的同时降低成本。
5.为实现上述目的,本发明实施例提供了一种三维场景灾变监控预警方法,包括:
6.获取监测区域的原始图像;
7.基于改进的种子区域生长算法,对所述原始图像进行分割处理,得到分割后的原始图像;
8.根据所述分割后的原始图像对预先构建的泥石流图像识别模型进行训练,得到训练好的泥石流图像识别模型;
9.每隔预设时间段对所述监测区域进行一次激光扫描,得到当前时刻的点云数据,并基于gnss导航系统和惯性导航系统,对所述当前时刻的点云数据进行定位,得到当前时刻的标准激光点云数据;
10.基于所述当前时刻的标准激光点云数据得到当前时刻的初始dem;
11.对所述当前时刻的初始dem进行滤波得到当前时刻的最终dem;
12.利用所述训练好的泥石流图像识别模型和所述当前时刻的最终dem对所述监测区域进行地质灾害的监控预警。
13.作为是上述方案的改进,所述基于改进的种子区域生长算法,对所述原始图像进行分割处理,得到分割后的原始图像,包括:
14.将所述原始图像进行区域划分,并从中随机选择一个区域作为种子区域;
15.对所述种子区域周围的每一邻接区域,判断所述邻接区域的平均颜色分量值和所述种子区域的平均颜色分量值的比较结果是否小于预设阈值,若是,将所述邻接区域与所述种子区域合并,得到合并后的区域;
16.选取一个平均颜色分量值和所述种子区域的平均颜色分量值相同的区域,作为所述种子区域,重复步骤对所述种子区域周围的每一邻接区域,判断所述邻接区域的平均颜色分量值和所述种子区域的平均颜色分量值的比较结果是否小于预设阈值,若是,将所述
邻接区域与所述种子区域合并,得到合并后的区域,直到遍历完所述原始图像上所有的区域,得到分割后的原始图像。
17.作为是上述方案的改进,所述泥石流图像识别模型的构建过程至少包括:卷积操作、池化操作、relu变化、dropout、归一化。
18.其中,根据下式进行卷积操作:
[0019][0020]
式中,表示第l层卷积层的第j个特征图,f()表示激活函数,mj表示上一层的输出集合,表示卷积核,表示偏置参数,i表示次数,*表示卷积操作;
[0021]
根据下式进行池化操作:
[0022][0023]
式中,down()表示采样函数,表示每个输出特征图的多倍偏置参数,表示偏置参数;
[0024]
根据下式进行relu变化:
[0025]yijk
=max{0,x
ijk
}
[0026]
式中,x
ijk
表示输入值,y
ijk
表示输出值;
[0027]
在dropout中,将50%的隐藏层的输出设置为0;
[0028]
根据下式进行归一化:
[0029][0030][0031]
式中,p表示相邻信道输入特征群,α表示系列参数,k表示第k个核,x
ijk
表示第k个核在位置(i,j)运用relu变化的非线性化输出,g(k)表示通道数,beta表示预设参数,g(k
′
)表示通道数。
[0032]
作为是上述方案的改进,所述泥石流图像识别模型的训练过程至少包括反向传播。
[0033]
其中,所述反向传播包括卷积层梯度计算和池化层梯度计算:
[0034]
根据下式进行卷积层梯度计算:
[0035][0036]
式中,表示节点j在l层的第一个导函数误差,β表示输入系数,
°
表示每个部分相乘,表示对于节点j的偏导值的激活函数,up()表示采样函数,u表示输入节点,δ表示导函数误差;
[0037][0038]
式中,表示和的转置,conv2表示一个卷积函数,rot180表示卷积核被转置;
[0039]
根据下式进行池化层梯度计算:
[0040][0041]
式中,
[0042]
作为是上述方案的改进,所述基于所述当前时刻的标准激光点云数据得到当前时刻的初始dem,包括:
[0043]
将所述当前时刻的标准激光点云数据进行自适应分块处理,得到每一分块的点云数据;
[0044]
基于主成分分析法,对在x方向和y方向的所述每一分块的点云数据进行局部平面拟合处理,并利用反距离加权法和样条加权法对经过局部平面拟合处理过的点云数据进行插值处理,得到初始拟合曲面,对在z方向的所述每一分块的点云数据和所述初始拟合曲面进行滤波处理,得到最终拟合曲面;
[0045]
对所述最终拟合曲面进行滤波处理,得到当前时刻的初始dem。
[0046]
作为是上述方案的改进,所述对所述当前时刻的初始dem进行滤波得到当前时刻的最终dem,包括:
[0047]
采用小波函数来对所述当前时刻的初始dem进行滤波,得到当前时刻的最终dem。
[0048]
与现有技术相比,本发明实施例提供的一种三维场景灾变监控预警方法,通过利用改进的种子区域生长算法识别监测区域发生泥石流的区域、激光点云数据构建表征监测区域的三维场景的数字高程模型(数字高程模型,digital elevation model,dem),能够实现三维场景灾变监控预警。由此可见,本发明实施例通过结合基于训练好的泥石流图像识别模型的图像识别和激光点云对监测区域进行地质灾害的监控预警,能够在提高精度的同时降低成本。
附图说明
[0049]
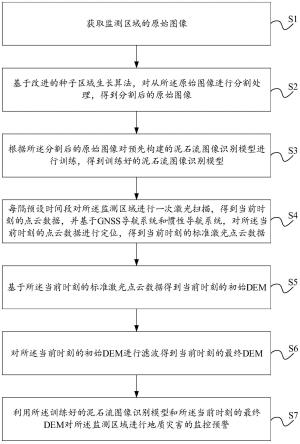
图1是本发明实施例提供的一种三维场景灾变监控预警方法的流程图。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0051]
参见图1,图1是本发明实施例提供的一种三维场景灾变监控预警方法的流程图,所述三维场景灾变监控预警方法,包括:
[0052]
s1、获取监测区域的原始图像;
[0053]
s2、基于改进的种子区域生长算法,对所述原始图像进行分割处理,得到分割后的原始图像;
[0054]
s3、根据所述分割后的原始图像对预先构建的泥石流图像识别模型进行训练,得到训练好的泥石流图像识别模型;
[0055]
s4、每隔预设时间段对所述监测区域进行一次激光扫描,得到当前时刻的点云数据,并基于gnss导航系统和惯性导航系统,对所述当前时刻的点云数据进行定位,得到当前时刻的标准激光点云数据;
[0056]
s5、基于所述当前时刻的标准激光点云数据得到当前时刻的初始dem;
[0057]
s6、对所述当前时刻的初始dem进行滤波得到当前时刻的最终dem;
[0058]
s7、利用所述训练好的泥石流图像识别模型和所述当前时刻的最终dem对所述监测区域进行地质灾害的监控预警。
[0059]
具体地,在步骤s2中,所述基于改进的种子区域生长算法,对所述原始图像进行分割处理,得到分割后的原始图像,包括:
[0060]
s21、将所述原始图像进行区域划分,并从中随机选择一个区域作为种子区域;
[0061]
s22、对所述种子区域周围的每一邻接区域,判断所述邻接区域的平均颜色分量值和所述种子区域的平均颜色分量值的比较结果是否小于预设阈值,若是,将所述邻接区域与所述种子区域合并,得到合并后的区域;
[0062]
可以理解的是,考虑种子区域s0周围的八个邻接区域s,如果s0和s满足生长标准,即满足平均颜色值相同或相近,则将它们合并到同一个区域。
[0063]
s23、选取一个平均颜色分量值和所述种子区域的平均颜色分量值相同的区域,作为所述种子区域,重复步骤s21对所述种子区域周围的每一邻接区域,判断所述邻接区域的平均颜色分量值和所述种子区域的平均颜色分量值的比较结果是否小于预设阈值,若是,将所述邻接区域与所述种子区域合并,得到合并后的区域,直到遍历完所述原始图像上所有的区域,得到分割后的原始图像。
[0064]
本发明实施例并不采用将区域中分割出一个种子点作为生长起点进行区域性增长的传统种子区域生长算法,而是选择一个区域作为生长起点,与邻接区域进行合并的方法,能够更改准确的提取区域和位置信息,同时使用平均颜色作为参考值,能够克服图像不均匀和不稳定的特征。
[0065]
具体地,在步骤s3中,所述泥石流图像识别模型的构建过程至少包括:卷积操作、池化操作、relu变化、dropout、归一化。
[0066]
具体地,根据下式进行卷积操作:
[0067][0068]
其中,表示第l层卷积层的第j个特征图,f()表示激活函数,mj表示上一层的输
出集合,表示卷积核,表示偏置参数,i表示次数,*表示卷积操作;
[0069]
根据下式进行池化操作:
[0070][0071]
其中,down()表示采样函数,表示每个输出特征图的多倍偏置参数,表示偏置参数。
[0072]
通常最大化池化是基于卷积特征的提取,通过卷积隐藏节点,不断降低特征维度,从而降低分类器的负担,通常采用以下方法:
[0073]yijk
=max{x
″
ij
:i≤i
′
《i+p,j≤j
′
≤j+p}
[0074]
其中,p表示窗口大小,y
ijk
表示(i,j)在采样层的最大输出值,x
″
ij
表示输入值,(i,j)表示节点,i
′
,j
′
分别表示在池化过程中的不同节点。
[0075]
根据下式进行relu变化:
[0076]yijk
=max{0,x
ijk
}
[0077]
其中,x
ijk
表示relu变化的输入值,y
ijk
表示relu变化的输出值。
[0078]
本发明采用relu作为激活函数,主要原因是因为sigmoid函数计算误差反向传播梯度需要大量计算,而relu更易实现;sigmoid函数在深度网络的反向推导中,容易出现误差梯度消失的问题;relu生成的是稀疏网络,减少了参数之间的相互依赖关系从而缓解了网络深度训练的过拟合问题。
[0079]
dropout具体包括:
[0080]
对于50%隐藏层的输出设置为0,并且不对前面和后续有任何影响,采用这种方法得到的参数能够适应不同情况下的网络结构,提高了系统的泛化能力。
[0081]
根据下式进行归一化:
[0082][0083][0084]
其中,p表示相邻信道输入特征群,α表示系列参数,k表示第k个核,x
ijk
表示第k个核在位置(i,j)运用relu变化的非线性化输出,g(k)表示通道数,beta为预设参数,g(k
′
)表示通道数。
[0085]
在局部响应归一化层进行归一化处理即执行“近抑制”操作,用以对局部输入区域规范化,在相邻信道范围内,归一化算子的形式如上式所示。
[0086]
具体地,在步骤s3中,所述泥石流图像识别模型的训练过程至少包括反向传播。
[0087]
具体地,所述反向传播包括卷积层梯度计算和池化层梯度计算。
[0088]
卷积层梯度计算:
[0089]
在假设l是通过卷积层l+1进行采样,对于所有的输入节点u,δ代表导函数误差,具体公式如下:
[0090]
[0091]
其中,表示节点j在l层的第一个导函数误差,β为输入系数,
°
表示每个部分相乘,表示对于节点j的偏导值的激活函数,up()代表采样函数。
[0092]
卷积梯度和连接点的梯度相关,计算公式如下:
[0093][0094]
其中,表示和的转置,conv2表示一个卷积函数,rot表示卷积核被转置。
[0095]
池化层梯度计算:
[0096]
和计算卷积层梯度类似,池化层的梯度计算为:
[0097][0098]
其中,
[0099]
具体地,在步骤s4中,每次激光扫描的时候要保证每次飞行的标准一致,作业流程、航带路线保持不变,从而确保每一时刻的点云数据之间坐标基准的统一性。
[0100]
具体地,在步骤s5中,所述基于所述当前时刻的标准激光点云数据得到当前时刻的初始dem,包括:
[0101]
s51、将所述当前时刻的标准激光点云数据进行自适应分块处理,得到每一分块的点云数据;
[0102]
具体地,在cyclone6.0中按照intensity字段来识别不同监测区域的激光点云,使用点云自适应分块算法将标准激光点云数据划分为若干点数近似的子块;
[0103]
s52、基于主成分分析法,对在x方向和y方向的所述每一分块的点云数据进行局部平面拟合处理,并利用反距离加权法和样条加权法对经过局部平面拟合处理过的点云数据进行插值处理,得到初始拟合曲面,对在z方向的所述每一分块的点云数据和所述初始拟合曲面进行滤波处理,得到最终拟合曲面;
[0104]
可以理解的是,这一过程是为了对点云数据进行去噪,提高点云数据的精细度。首先是利用主成分分析法来找到两个主成分,在两个主成分(x,y)方向上进行局部平面拟合处理,能够去除较大的噪声,然后利用反距离加权法和样条加权法对初步去噪后的点云数据(即经过局部平面拟合处理过的点云数据)进行插值处理,得到初始拟合曲面,最后基于第三个主成分z方向和初始拟合曲面进行滤波去噪,得到最终拟合曲面。
[0105]
s53、对所述最终拟合曲面进行滤波处理,得到当前时刻的初始dem。
[0106]
具体地,通过滤波算法对所述最终拟合曲面进行滤波,得到当前时刻的初始dem。
[0107]
具体地,在步骤s6中,所述对所述当前时刻的初始dem进行滤波得到当前时刻的最终dem,包括:
[0108]
采用小波函数来对所述当前时刻的初始dem进行滤波,得到当前时刻的最终dem。
[0109]
具体地,在步骤s7中,将监测区域的实时图像输入至训练好的卷积神经网络,能够实时识别监测区域是否发生泥石流及发生泥石流的实时位置;将当前时刻的最终dem和上一时刻的最终dem进行比较,能够实时识别监测区域是否发生泥石流及发生泥石流的实时位置。
[0110]
本发明实施例所提供的一种三维场景灾变监控预警方法,通过利用改进的种子区域生长算法识别监测区域发生泥石流的区域、激光点云数据构建表征监测区域的三维场景的数字高程模型,能够实现三维场景灾变监控预警。由此可见,本发明实施例通过结合基于训练好的泥石流图像识别模型的图像识别和激光点云对监测区域进行地质灾害的监控预警,能够在提高精度的同时降低成本。
[0111]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1