一种确保变电站巡检机器人通过门禁系统的方法与流程
[0001]
本发明属于巡检机器人技术领域,尤其涉及一种确保变电站巡检机器人通过门禁系统的方法。
背景技术:
[0002]
现代化的变电站中存在大量的巡检机器人以代替人工巡检,巡检机器人对变电站的巡检任务包含室内和室外两种场景;当巡检机器人从室外进入室内或者在室内进行穿梭巡检时,需要变电站门禁系统为巡检机器人放行。通常根据巡检机器人的位置来决定是否开门,这需要巡检机器人实时向集控中心传递位置信息,当巡检机器人无线通信模块发生故障无法传递实时位置信息到集控中心时,门禁系统便无法为该巡检机器人放行,导致室内巡检任务无法进行,严重影响了巡检效率。
技术实现要素:
[0003]
本发明要解决的技术问题:提供一种确保变电站巡检机器人通过门禁系统的方法,以解决当巡检机器人无线通信模块发生故障无法传递实时位置信息到集控中心时,门禁系统便无法为该巡检机器人放行,导致巡检任务无法进行,严重影响了巡检效率。
[0004]
本发明技术方案:
[0005]
一种确保变电站巡检机器人通过门禁系统的方法,其特征在于:它包括:
[0006]
步骤1、在巡检机器人上安装rfid电子标签和rfid天线,电子标签中保存了每个巡检机器人的工作编号;
[0007]
步骤2、每个门禁位置均安装rfid一体机;
[0008]
步骤3、巡检机器人通过自带的无线通信模块实时向集控中心发送位置信息,集控中心收到巡检机器人位置信息后对门禁进行开启或关闭控制;
[0009]
步骤4、当巡检机器人自带的无线通信模块损坏时,巡检机器人进入离线工作模式,无法向集控中心发送实时位置信息,无法通过步骤3对门禁系统进行控制,即进入步骤5;
[0010]
步骤5、巡检机器人进入离线工作模式在到达门禁位置时,巡检机器人的rfid电子标签被rfid一体机发出的固定频率的射频信号激活,从而响应rfid一体机的脉冲信号,以脉冲载波通信的方式向rfid一体机发送电子标签内保存的工作编号;
[0011]
步骤6、当rfid一体机收到巡检机器人的电子标签的信号后;rfid一体机对门禁进行开启或关闭控制;
[0012]
步骤7、在巡检机器人通过门禁系统后,会逐渐远离门禁位置,当rfid一体机在一段时间之内无法收到巡检机器人的响应信号,则判定机器人已经通过门禁位置并远离,rfid一体机向门禁发送关闭命令,并归还门禁管理权给集控中心。
[0013]
所述电子标签为高频无源电子标签,可以接收固定频率的射频信号,可被固定频率的射频信号激活,然后通过天线将电子标签中存储的工作编号以载波射频信号的方式向
外发射。
[0014]
所述rfid一体机包括rfid控制模块、rfid读写器、rs232串口通信模块和网络通信模块;rfid读写器、rs232串口通信模块和网络通信模块分别与rfid控制模块连接;所述rfid读写器通过天线发射和接收固定频率的射频信号,发射射频信号激活射频范围内的电子标签,接收射频信号功能用于接收巡检机器人上的电子标签发来的载波射频信号,rfid控制模块用于调制解调射频信号,内部存储器用于保存变电站中所有巡检机器人信息,巡检机器人信息指的是工作编号与门禁权限;rs232串口通信模块与门禁电机驱动模块连接用于控制门禁电机,通过对门禁点电机的控制实现门禁的开启与关闭。
[0015]
集控中心收到巡检机器人位置信息后对门禁进行开启或关闭控制的方法为:集控中心收到巡检机器人位置信息后,将该位置与门禁地图中所有门禁位置进行比较和计算,计算机器人位置与每个门禁位置的距离,如果巡检机器人的位置
r
l
i
(
r
x
i
,
r
y
i
,
r
z
i
)与第k个门禁位置的距离小于3米,则开启第k个门禁位置,为机器人放行,当巡检机器人的距离与k个门禁位置的距离大于3米的时候,集控中心向第k个门禁位置发送关闭命令,对该门禁位置进行关闭。
[0016]
所述rfid一体机对门禁进行开启或关闭控制的方法为:rfid一体机对电子标签的信号进行解码获得巡检机器人的工作编号,根据获得的工作编号,rfid一体机向集控中心请求该工作编号的巡检机器人的最后位置,如果该巡检机器人的最后位置
r
l
i
(
r
x
i
,
r
y
i
,
r
z
i
)与门禁位置
d
l
k
(
d
x
k
,
d
y
k
,
d
z
k
)的距离大于距离阈值,则rfid一体机判断巡检机器人进入离线工作模式,rfid一体机将代替集控中心接管本次门禁管理,通过与rfid一体机内部存储器中存储的巡检机器人信息中的工作编号进行比较,然后查看该巡检机器人是否拥有门禁权限,如果拥有权限,则为该机器人放行。
[0017]
所述rfid一体机内部存储器中存储的巡检机器人通过集控中心获得,rfid一体机通过网络通信模块周期性的向集控中心读取所有巡检机器人信息,巡检机器人信息包括巡检机器人的工作编号和门禁权限,rfid一体机通过与集控中心的信息同步,以获得巡检机器人上线或下线、门禁权限策略发生变化情况。
[0018]
所述巡检机器人的无线通信与rfid通信同时启用,根据巡检机器人最后向集控中心发送的位置决定是否让rfid一体机接替本次门禁控制。
[0019]
所述电子标签接收固定915mhz的射频信号,同时被该频率的信号激活,通过天线将带有工作编号的信息以915mhz的载波信号向外发射。
[0020]
本发明的有益效果:
[0021]
本发明通过rfid技术对变电站门禁系统进行改进,形成了巡检机器人、门禁系统与集控中心的联动方法,在传统的基于巡检机器人位置的门禁控制系统策略基础上,使用rfid一体机识别当前门禁位置处的巡检机器人的工作编号,并主动向集控中心请求该巡检机器人的位置信息,智能判断机器人是否进入离线工作状态,并在巡检机器人进入离线工作状态之后,接替集控中心的门禁控制任务,为拥有权限的机器人放行;通过rfid一体机内部保存的巡检机器人信息,使得一体机可以自主的完成门禁系统的控制,从而减少对门禁系统对网络的依赖;rfid一体机还会定期向集控中心请求所有巡检机器人的工作编号和门禁权限,更新内部保存的巡检机器人信息,使得门禁系统具有操作上的灵活性。
[0022]
本发明提高了变电站门禁系统控制策略的可靠性,能够在巡检机器人处于离线工
作状态完成室内巡检任务中的门禁控制。信息同步功能保证了门禁系统的可裁剪性,有利于实现快速的巡检机器人上线与下线、门禁权限策略更新等操作。
[0023]
解决了当巡检机器人无线通信模块发生故障无法传递实时位置信息到集控中心时,门禁系统便无法为该巡检机器人放行,导致巡检任务无法进行,严重影响了巡检效率。
附图说明:
[0024]
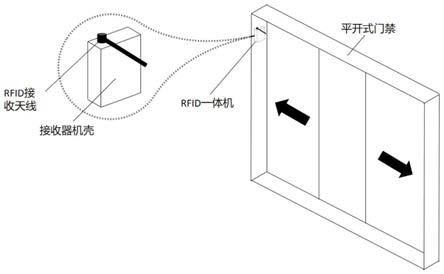
图1为本发明rfid一体机安装示意图。
具体实施方式
[0025]
一种确保变电站巡检机器人通过门禁系统的方法,它具体包括:
[0026]
步骤1、每个巡检机器人均带有rfid(射频通信)电子标签,通过rfid读写器为每一个巡检机器人的电子标签写入其对应的工作编号;电子标签采用超高频无源电子标签,接收固定915mhz的射频信号,同时被该频率的信号激活,可通过天线将带有工作编号信息的以915mhz的载波信号向外发射。
[0027]
步骤2、每个门禁位置均需安装嵌入式rfid一体机,如图1所示。rfid一体机包括rfid控制模块、rfid读写器、rs232串口通信模块和网络通信模块;rfid读写器、rs232串口通信模块和网络通信模块分别与rfid控制模块连接;所述rfid读写器通过天线发射和接收固定频率的射频信号,发射射频信号激活射频范围内的电子标签,接收射频信号功能用于接收巡检机器人上的电子标签发来的载波射频信号,rfid控制模块用于调制解调射频信号,内部存储器用于保存变电站中所有巡检机器人信息,巡检机器人信息指的是工作编号与门禁权限;rs232串口通信模块与门禁电机驱动模块连接用于控制门禁电机,通过对门禁点电机的控制实现门禁的开启与关闭。
[0028]
rfid读写器通过天线发射和接收915mhz的射频信号,可稳定激活3米内的电子标签并稳定接收3米内的射频载波信号,发射射频信号功能用于激活其射频范围内的电子标签,接收射频信号功能用于对接收巡检机器人发来的载波射频信号。rfid一体机内部带有存储器,用于保存变电站中所有巡检机器人的工作编号和门禁权限。rs232串口通信模块用于和门禁电机驱动模块通信,控制门禁的开启与关闭;网络通信模块负责与集控中心进行通信,通过网络通信模块,一体机可以向集控中心请求巡检机器人的工作编号。
[0029]
步骤3、巡检机器人通过无线通信模块实时向集控中心发送位置信息
r
l
i
(
r
x
i
,
r
y
i
,
r
z
i
),集控中心收到巡检机器人位置信息后,将该位置与门禁地图进行计算,计算机器人位置与每个门禁位置的距离,如果巡检机器人的位置
r
l
i
(
r
x
i
,
r
y
i
,
r
z
i
)与第k个门禁位置的距离小于3米,则开启第k个门禁位置,为机器人放行。当巡检机器人的距离与k个门禁位置的距离大于3米的时候,集控中心向第k个门禁位置发送关闭命令,对该门禁位置进行关闭。
[0030]
步骤4、当巡检机器人无线模块损坏,巡检机器人进入离线工作模式,无法向集控中心发送其具体位置,无法通过步骤3所述方法对门禁系统进行控制,即进入步骤5。
[0031]
本发明无线通信模块与rfid通信为同时启用,其根据巡检机器人最后向集控中心发送的位置决定是否让一体机接替本次门禁控制。
[0032]
步骤5、巡检机器人进入离线工作模式,在达到门禁位置的附近后,电子标签会因
为嵌入式一体机发出的915mhz的射频信号而被激活,从而响应一体机的脉冲信号,以脉冲载波通信的方式向一体机发送电子芯片内的工作编号。
[0033]
步骤6、一体机收到巡检机器人的电子标签的信号后,通过内部rfid模块对载波信号进行解码,解码获得巡检机器人的工作编号。根据解析获得的工作编号,一体机向集控中心请求该工作编号的巡检机器人的最后位置。
[0034]
由于本发明采用超高频rfid作为巡检机器人与rfid一体机的通信频率,其稳定通信距离为3米,因此本发明将巡检机器人的最后位置
r
l
i
(
r
x
i
,
r
y
i
,
r
z
i
)与门禁位置
d
l
k
(
d
x
k
,
d
y
k
,
d
z
k
)的距离阈值设置为3米。当巡检机器人进入一体机射频覆盖区域,rfid一体机收到巡检机器人响应信号后,会向集控中心请求巡检机器人位置,如果巡检机器人与rfid一体机的距离大于3米,则可以判定该巡检机器人在到达rfid一体机射频覆盖范围之前就已经无法与集控中心通信,一体机将代替集控中心接管本次门禁管理为该机器人放行,从而不中断当前的巡检任务。rfid一体机对门禁控制权的接管可通过软件标志位的方式进行标识,当一体机收到巡检机器人相应的rfid信息后,向集控中心请求机器人的最后位置,如果机器人的最后位置与rfid一体机的距离小于3米,则rfid一体机内部嵌入式cpu将标志位设置为0,表示不托管本次门禁控制,否则设置为1,并激活相应的门禁控制策略。
[0035]
通过与内部存储器中存储的巡检机器人工作编号进行比较,即查看当前巡检机器人的工作编号是否存在于嵌入式rfid一体机存储器中存储的机器人工作编号结构体列表中,该列表中包含两个结构元素,一是机器人工作编号,二是当前机器人门禁权限,门禁权限使用二进制有序序列进行标识,0表示没有权限,1表示拥有权限。有n个门禁位置则二进制有序序列的长度为n,在n个门禁权限中,巡检机器人的第k个门禁位权限则可以使用二进制序列的第k位进行标识。
[0036]
步骤7、嵌入式rfid一体机存储器中保存的巡检机器人的工作编号通过与集控中心通信获得。嵌入式一体机通过网络通信模块,周期性的向集控中心拉取所有巡检机器人信息。本专利采用每天零点进行通信同步校验,不同变电站可根据工作要求自行调整同步时间,本专利中所述的时间并非强制要求。
[0037]
步骤8、在巡检机器人通过门禁系统后,会逐渐远离门禁位置,当rfid一体机在5秒时间之内没有收到巡检机器人传来的响应信息,则判定机器人已经通过门禁位置并远离,嵌入式rfid一体机通过rs232向门禁电机发送关闭命令,同时归还门禁管理权给集控中心。
[0038]
步骤8中,当巡检机器人通过门禁后,对门禁管理的归还与步骤6相同,rfid一体机内部嵌入式cpu将标志位设置为0,表示放弃门禁控制权。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1