错误监视装置和方法、交通控制服务器及事故分析系统与流程
错误监视装置和方法、交通控制服务器及事故分析系统
[0001]
相关申请的交叉引用
[0002]
本申请要求于2019年9月5日提交的韩国专利申请第10-2019-0110108号的优先权和权益,其全部内容通过引用合并于此。
技术领域
[0003]
本公开涉及一种移动体控制方法和装置。更具体地,本公开涉及一种基于错误监视的移动体控制方法和装置。
背景技术:
[0004]
该部分中的陈述仅提供与本公开有关的背景信息,并且可能不构成现有技术。
[0005]
作为运输工具中的一种,车辆(或移动体)是用于现代世界中生活的非常重要的装置(means)和工具。另外,车辆本身可以被认为是赋予某人意义的特殊事物。
[0006]
随着技术的进步,车辆所提供的功能也逐渐发展。例如,近年来,车辆不仅将乘客运送到目的地,而且满足乘客更快且更安全地到目的地的需求。另外,为了满足乘客的审美品味和舒适性,新的装置正在被添加到车辆系统中。另外,类似方向盘、变速器和加速/减速装置的现有装置也在开发中,使得可以向用户提供更多的功能。
[0007]
同时,脑计算机接口(brain-computer interface)或脑机器接口(brain-machine interface)是通过使用脑电波信号根据人的意图控制计算机或机器的领域。erp(event-related potential,事件相关电位)与认知功能密切相关。
技术实现要素:
[0008]
本公开提供一种交通事故分析系统。
[0009]
本公开还提供了一种交通事故分析系统,该系统基于错误监视来确定对于移动体之间的交通事故的主要责任。
[0010]
然而,本公开提供了一种执行错误监视的错误监视装置和方法。
[0011]
然而,本公开提供了一种交通控制服务器,其基于错误监视来确定对于移动体之间的交通事故的主要责任,及其操作方法。
[0012]
本公开可以提供一种错误监视装置,其包括:检测单元,确定在第一移动体上是否已经发生预定事件,感测单元,在预定时间内收集第一移动体的至少一名乘客的事件相关电位,分析器,其基于确定来分析在预定时间内收集的事件相关电位,以及发送器,其基于分析结果将第一移动体的错误信息发送到交通控制服务器。预定事件包括至少与第一移动体有关的交通事故,并且第一移动体的错误信息包括以下项中的至少一项:与事件相关电位的发生有关的时间信息、事件相关电位的波形、第一移动体的位置信息和第一移动体的操作信息。
[0013]
根据一个实施方式,感测单元还可包括第一移动体所包括的速度测量单元、图像获取单元、声音获取单元、车轮监视单元以及操纵装置单元中的至少一个。
[0014]
根据一个实施方式,速度测量单元可以测量第一移动体的速度和方向中的至少一个,并且当所测量的速度和所测量的方向中的至少一个在预定时间范围内超过预定阈值时,检测单元可以确定在第一移动体上发生预定事件。
[0015]
根据一个实施方式,图像获取单元可以监视第一移动体与不同于第一移动体的对象之间的距离,并且当距离在预定时间范围内低于预定阈值时,检测单元可以确定在第一移动体上发生预定事件。
[0016]
根据一个实施方式,声音获取单元可以获取从第一移动体的内部和外部中的至少一个产生的声音,并且当声音的音量在预定时间范围内超过预定阈值时,检测单元可以确定在第一移动体上发生预定事件。
[0017]
根据一个实施方式,车轮监视单元可以监视第一移动体的车轮内部的温度和压力水平中的至少一个,并且当水平在预定时间范围内超过预定阈值时,检测单元可以确定在第一移动体上发生预定事件。
[0018]
根据一个实施方式,操纵装置单元可以监视第一移动体的方向盘,加速踏板和制动器中的至少一个上的压力,当压力的大小在预定时间范围内超过预定阈值时,检测单元可以确定在第一移动体上发生预定事件。
[0019]
根据一个实施方式,检测单元可以通过将预定阈值应用于速度测量单元、图像获取单元、声音获取单元、车轮监视单元和操纵装置单元中的至少一个,来确定在第一移动体上是否已经发生预定事件。预定阈值是由用户输入设置的值或预定值。预定阈值的幅度分别根据速度测量单元,图像获取单元、声音获取单元、车轮监视单元和操纵装置单元设置。
[0020]
根据一个实施方式,事件相关电位(erp)可以包括错误相关否定(ern)和错误肯定(pe)中的至少一个。
[0021]
根据一个实施方式,事件相关电位(erp)可以进一步包括正确相关否定(crn)和正确肯定(pc)中的至少一种。
[0022]
根据一个实施方式,分析可以将在预定时间内收集的事件相关电位的幅度与预定阈值进行比较。
[0023]
根据一个实施方式,可以根据所述事件相关电位的类型和从其获取了所述事件相关电位的乘客中的至少一者来不同地确定预定阈值。
[0024]
根据一个实施方式,当在预定时间范围内收集的erp的幅度超过预定阈值范围时,发送器可以将第一移动体的错误信息发送到交通控制服务器。
[0025]
另外,本公开可以提供一种交通控制服务器,其包括:接收器,其从第一移动体接收第一移动体的错误信息,以及控制器,其基于第一移动体的错误信息,确定在第一移动体上发生的第一事件的责任程度。第一事件包括至少与第一移动体有关的交通事故。第一移动体的错误信息包括关于第一移动体中的至少一名乘客的事件相关电位何时发生的时间信息,事件相关电位的波形,第一移动体的位置信息以及第一移动体操作信息中的至少一个。
[0026]
根据一个实施方式,控制器可以通过使用第一移动体的错误信息来识别在第一移动体上发生的第一事件。
[0027]
根据一个实施方式,控制器还可以从安装在第一移动体的位置周围的预定范围内的图像获取单元获取与第一事件有关的信息,并通过使用获取的信息和第一移动体的错误
信息,来识别在第一移动体上发生的第一事件。
[0028]
根据一个实施方式,接收器还可以从与第一移动体不同的第二移动体接收至少一个第二移动体的错误信息,并且控制器还可以包括:通过使用第二移动体的错误信息,识别在第二移动体上发生的第二事件,以及基于识别的第二事件,选择与第一事件有关的第二移动体。
[0029]
根据一个实施方式,当第二事件与第一事件相同时,控制器可以选择发生第二事件的第二移动体。
[0030]
根据一个实施方式,控制器可以进一步包括针对在第一移动体和选择的第二移动体之间发生第一事件确定责任程度。
[0031]
根据一个实施方式,责任程度可以与第一移动体的erp的峰值和第二移动体的erp的峰值成比例。
[0032]
另外,本公开可以提供一种交通事故分析系统,其包括将移动体的错误信息发送到服务器的错误监视装置,以及通过使用移动体的错误信息来确定对于移动体之间的预定事件的责任程度的交通控制服务器。错误监视装置确定预定事件是否已经发生在第一移动体上,在预定时间内收集第一移动体的至少一名乘客的事件相关电位,基于确定的结果,分析在预定时间内收集的事件相关电位,以及基于分析结果,将第一移动体的错误信息发送给交通控制服务器。交通控制服务器从监视装置接收第一移动体的错误信息,并针对在第一移动体上发生的第一事件确定责任程度。预定事件至少包括与第一移动体有关的交通事件。第一移动体的错误信息包括与事件相关电位的发生有关的时间信息,事件相关电位的波形,第一移动体的位置信息和第一移动体的操作信息中的至少一个。
[0033]
根据一个实施方式,交通控制服务器还可包括:从与第一移动体不同的第二移动体接收至少一个第二移动体的错误信息,通过使用第二移动体的错误信息,识别在第二移动体上发生的第二事件,选择具有与第一事件相同的第二事件的第二移动体,以及针对在第一移动体和选择的第二移动体之间的第一事件确定责任程度。
[0034]
根据一个实施方式,责任程度可以与第一移动体的erp的峰值和第二移动体的erp的峰值成比例。
[0035]
另外,本公开可以提供一种错误监视方法,该方法包括确定预定事件是否已经发生在第一移动体上,感测以在预定时间量内收集第一移动体的至少一名乘客的事件相关电位,基于确定结果分析在预定时间内收集的事件相关电位,基于分析结果将第一移动体的错误信息发送给交通控制服务器。预定事件包括至少与第一移动体有关的交通事故,并且第一移动体的错误信息包括以下项中的至少一者:与事件相关电位的发生有关的时间信息、事件相关电位的波形、第一移动体的位置信息和第一移动体的操作信息。
[0036]
根据一个实施方式,感测步骤还可包括第一移动体所包括的速度测量单元,图像获取单元,声音获取单元,车轮监视单元或操纵装置单元中的至少一个。
[0037]
根据一个实施方式,速度测量单元可以测量第一移动体的速度和方向中的至少一个,并且当所测量的速度和所测量的方向中的至少一个在预定时间范围内超过预定阈值时,检测步骤可以包括确定在第一移动体上发生预定事件。
[0038]
根据一个实施方式,图像获取单元可以监视第一移动体与不同于第一移动体的对象之间的距离,并且当距离在预定时间范围内低于预定阈值时,检测步骤可以包括确定在
第一移动体上发生预定事件。
[0039]
根据一个实施方式,声音获取单元可以获取从第一移动体的内部和外部中的至少一个产生的声音,并且当声音的音量在预定时间范围内超过预定阈值时,检测步骤可以包括确定在第一移动体上发生预定事件。
[0040]
根据一个实施方式,车轮监视单元可以监视第一移动体的车轮内部的温度和压力水平中的至少一个,并且当水平在预定时间范围内超过预定阈值时,检测步骤可以包括确定在第一移动体上发生预定事件。
[0041]
根据一个实施方式,操纵装置单元可以监视第一移动体的方向盘,加速踏板和制动器中的至少一个上的压力,当压力的大小在预定时间范围内超过预定阈值时,检测步骤可以包括确定在第一移动体上发生预定事件。
[0042]
根据一个实施方式,错误监视方法还可包括:通过将预定阈值应用于速度测量单元,图像获取单元,声音获取单元,车轮监视单元和操纵装置单元中的至少一个,来确定在第一移动体是否已经发生上预定事件。预定阈值是由用户输入设置的值或预定值。预定阈值的幅度分别根据速度测量单元,图像获取单元,声音获取单元,车轮监视单元和操纵装置单元设置。
[0043]
根据一个实施方式,事件相关电位(erp)可以包括错误相关否定(ern)和错误肯定(pe)中的至少一个。
[0044]
根据一个实施方式,事件相关电位(erp)可以进一步包括正确相关否定(crn)和正确肯定(pc)中的至少一种。
[0045]
根据一个实施方式,分析可以将在预定时间内收集的事件相关电位的幅度与预定阈值进行比较。
[0046]
根据一个实施方式,可以根据所述事件相关电位的类型和从其获取了所述事件相关电位的乘客中的至少一者来不同地确定预定阈值。
[0047]
根据一个实施方式,当在预定时间范围内收集的erp的幅度超过预定阈值范围时,发射步骤可以包括将第一移动体的错误信息发送到交通控制服务器。
[0048]
另外,本公开可以提供一种用于交通控制服务器的操作方法,该方法包括:从第一移动体接收第一移动体的错误信息,以及基于第一移动体的错误信息,针对在第一移动体上发生的第一事件确定责任程度来进行控制。第一事件包括至少与第一移动体有关的交通事故。第一移动体的错误信息包括关于第一移动体中的至少一名乘客的事件相关电位何时发生的时间信息,事件相关电位的波形,第一移动体的位置信息以及第一移动体操作信息中的至少一个。
[0049]
根据一个实施方式,控制步骤可以包括通过使用第一移动体的错误信息来识别在第一移动体上发生的第一事件。
[0050]
根据一个实施方式,控制步骤可以包括:从安装在第一移动体的位置周围的预定范围内的图像获取单元获取与第一事件有关的信息,并通过使用获取的信息和第一移动体的错误信息,识别在第一移动体上发生的第一事件。
[0051]
根据一个实施方式,接收步骤还可以包括:从与第一移动体不同的第二移动体接收至少一个第二移动体的错误信息,并且控制步骤还可以包括:通过使用第二移动体的错误信息,识别发生在第二移动体上的第二事件,以及基于识别的第二事件,选择与第一事件
有关的第二移动体。
[0052]
根据一个实施方式,用于与第一事件有关的第二移动体的选择步骤可以包括:当第二事件与第一事件相同时,控制器可以选择发生第二事件的第二移动体。
[0053]
根据一个实施方式,控制步骤可以进一步包括:确定在第一移动体和选择的第二移动体之间发生第一事件的责任程度。
[0054]
根据一个实施方式,责任程度可以与第一移动体的erp的峰值和第二移动体的erp的峰值成比例。
[0055]
根据本文提供的描述,其他应用领域将变得显而易见。应该理解的是,描述和具体示例仅旨在用于说明的目的,并不旨在限制本公开的范围。
附图说明
[0056]
为了使本公开易于理解,现在将通过示例的方式描述本公开的各种形式,并参考附图,其中:
[0057]
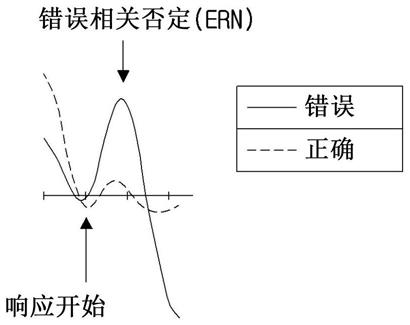
图1是示出本公开的一种形式的ern的一般波形的视图;
[0058]
图2是示出根据本公开的一种形式的ern和pe的一般波形的视图;
[0059]
图3是示出根据本公开的另一形式的pe的偏转特性的视图;
[0060]
图4a和图4b是分别示出本公开的一种形式的erp和pe的测量区域的视图;
[0061]
图5是示出根据本公开的一种形式的ern和crn的一般波形的视图;
[0062]
图6是示出本公开的一种形式中对应于大脑皮层区域的eeg测量通道的视图;
[0063]
图7是示出根据本公开的一种形式的使用错误监视的交通事故分析系统的配置的框图;
[0064]
图8是示出根据本公开的一种形式的错误监视装置的配置的框图;
[0065]
图9是示出根据本公开的一种形式的当目标erp为ern和pe时的测量时间范围的图;
[0066]
图10是示出根据本公开的一种形式的当目标erp分别是ern和pe时比较目标erp和预定阈值的过程的图;
[0067]
图11是示出本公开的一种形式的交通控制服务器的配置的框图;
[0068]
图12是示出根据本公开的一种形式的使用错误监视的交通事故分析系统的操作方法的流程图;以及
[0069]
图13是示出根据本公开的一种形式的,当第一移动体与先前的第二移动体碰撞时交通事故分析系统的操作的视图。
[0070]
本文描述的附图仅出于说明目的,并且无意以任何方式限制本公开的范围。
具体实施方式
[0071]
以下描述本质上仅是示例性的,并不旨在限制本公开、应用或用途。应当理解,在整个附图中,对应的参考数字表示相似或对应的部件和特征。
[0072]
将结合附图详细描述本公开的示例性形式,使得本领域普通技术人员将容易理解和实现由本公开提供的设备和方法。然而,本公开可以以各种形式实现,并且本公开的范围不应被解释为限于示例性形式。
[0073]
在描述本公开的形式时,当公知的功能或配置可能模糊本公开的精神时,将不对其进行详细描述。
[0074]
在本公开中,将理解,当元件被称为“连接到”、“耦接到”另一元件或与另一元件“组合”时,其可以直接连接到或耦接到另一元件或与另一元件组合,或者在它们之间可以存在中间元件。将进一步理解,当在本公开中使用时,术语“包括(comprises)”、“包括(includes)”、“具有”等指定所述特征、整数、步骤、操作、元件、组件和/或其组合的存在,但是不排除一个或多个其他特征、整数、步骤、操作、元件、组件和/或其组合的存在或添加。
[0075]
将理解,尽管术语“第一”、“第二”等可以在本文中用于描述各种元件,但是这些元件不应受这些术语的限制。这些术语仅用于区分一个元件与另一元件,而不用于显示元件之间的顺序或优先级。例如,在不脱离本公开的教导的情况下,以下讨论的第一元件可以被称为第二元件。类似地,第二元件也可以被称为第一元件。
[0076]
在本公开中,区分的元件被称为清楚地描述各种元件的特征,并且不是指元件在物理上彼此分离。即,多个区分的元件可以组合为单个硬件单元或单个软件单元,并且相反地,一个元件可以由多个硬件单元或软件单元来实现。因此,尽管没有具体说明,但是各种元件的集成形式或一个元件的分离形式可以落入本公开的范围内。另外,诸如“单元”或“模块”等的术语应被理解为处理至少一个功能或操作的单元,并且可以以硬件方式(例如处理器)、软件方式或硬件方式和软件方式的组合来实现。
[0077]
在本公开中,以各种形式描述的所有构成元件不应被解释为基本元件,而是一些构成元件可以是任选元件。因此,由构成元件的相应子集以某种形式配置的形式也可以落入本公开的范围内。另外,通过将一个或多个元件添加到各种元件而配置的形式也可以落入本公开的范围内。
[0078]
作为构成脑的神经元的电活动,脑电波信号(或脑信号、脑电波)是指直接和间接反映人的有意识或无意识状态的生物信号。可以在人头皮的每个区域测量脑电波信号,并且其波长频率主要为30hz或以下,并且电位差为几十微伏。根据脑活动和状态,可能会出现各种波形。根据人的意图使用脑电波信号进行界面控制的研究正在进行中。可以通过使用eeg(electro encephalo graphy,脑电图)(使用由脑活动引起的电信号)、meg(magneto encephalo graphy,脑磁图)(使用与电信号一起出现的磁信号)以及fmri(functional magnetic resonance imaging,功能性磁共振成像)或fnirs(near-infrared spectroscopy,近红外光谱)(使用血液中氧饱和度的变化)来获取脑电波信号。尽管fmri和fnirs是用于测量脑活动的有用技术,但是fmri通常具有低时间分辨率,并且fnirs具有低空间分辨率。由于这些限制,eeg信号凭借优异的便携性和时间分辨率而被广泛使用。
[0079]
脑电波信号根据脑活动在空间和时间上变化。由于脑电波信号通常难以分析,并且其波形不易于在视觉上分析,因此提出了各种处理方法。
[0080]
例如,根据振荡的次数(频率),可以基于频带对脑电波信号进行分类(功率谱分类)。该分类将所测量的脑电波信号视为每个特定频率下的简单信号的线性和,将信号分解为每个频率分量并且指示对应的幅度。可以通过使用通常用于噪声消除的预处理、到频域的傅里叶变换和带通滤波器(bpf)来获取每个频率的脑电波信号。
[0081]
更具体地,根据频带,脑电波可以被分类为δ波、θ波、α波、β波和γ波。δ波是频率为3.5hz或以下且幅度为20μv至200μv的脑电波,主要出现在正常深度睡眠或新生儿中。另外,
随着我们对物理世界的意识降低,δ波可能会增加。通常,θ波是频率为3.5hz至7hz的脑电波,主要出现在情绪稳定状态或睡眠中。
[0082]
另外,θ波主要在顶叶皮层(parietal cortex)和枕叶皮层(occipitalcortex)生成,并且可以出现在平静集中期间,用于回忆记忆或冥想。通常,α波是频率为8hz至12hz的脑电波,主要出现在放松和舒适状态中。另外,α波通常在休息期间在枕叶皮层生成,并且可能在睡眠中减弱。通常,β波是频率为13hz至30hz的脑电波,主要出现在足够可承受的紧张状态中,或者出现在引起一定程度的注意时。另外,β波主要在额叶皮层(frontal cortex)生成,并且与唤醒状态或集中的脑活动、病理现象和药效相关。β波可能出现在整个大脑的广阔区域中。另外,具体地,β波可以被分为频率为13hz至15hz的smr波、频率为15hz至18hz的中β波和频率为20hz及以上的高β波。由于β波在类似焦虑和紧张的压力下表现得更强,因此它们被称为压力波。γ波是通常频率为30hz至50hz的脑电波,主要出现在强兴奋状态或高级认知信息处理期间。另外,γ波可能出现在意识的唤醒状态和rem睡眠期间,并且也可能与β波重叠。
[0083]
根据频带的每个脑电波信号与特定的认知功能相关联。例如,δ波与睡眠相关联,θ波与工作记忆相关联,并且α波与注意或抑制相关联。因此,每个频带处的脑电波信号的属性选择性地显示特定的认知功能。另外,每个频带处的脑电波信号在头部表面上的每个测量区间中可能示出稍微不同的方面。大脑皮层可以被分为额叶皮层、顶叶皮层、颞叶皮层和枕叶皮层。这些部分可能有几个不同的作用。例如,对应于头部后部的枕叶皮层具有初级视觉皮层,并且因此可以初级处理视觉信息。位于头部顶部附近的顶叶皮层具有体感皮层,并且因此可以处理运动/感觉信息。另外,额叶皮层可以处理与记忆和思维相关的信息,并且颞叶皮层可以处理与听觉和嗅觉相关的信息。
[0084]
同时,对于另一示例,可以通过使用erp(事件相关电位)来分析脑电波信号。erp是与来自外部的刺激或内部的心理过程相关联的脑中的电变化。erp是指包括脑的电活动的信号,该信号由包括特定信息(例如,图像、语音、声音、执行命令等)的刺激在自呈现刺激起的一定时间之后引起。
[0085]
为了分析erp,期望将信号与噪声分离的处理。可以主要使用平均方法。特别地,通过对基于刺激开始时间测量的脑电波进行平均,可以去除与刺激无关的脑电波,并且仅挑选出相关的电位,即通常与刺激处理相关联的脑活动。
[0086]
由于erp具有高时间分辨率,因此它与认知功能的研究密切相关。erp是由外部刺激诱发或与内部状态相关的电现象。根据刺激的类型,erp可以被分类为听觉相关电位、视觉相关电位、体感相关电位和嗅觉相关电位。根据刺激的性质,erp可以被分类为外源性erp和内源性erp。外源性erp具有由外部刺激确定的波形,与自动处理相关,并且主要出现在被给予刺激的初始阶段。例如,外源性erp是脑干电位。另一方面,内源性erp由内部认知过程或心理过程或状态确定,与刺激无关,并且与“受控处理”相关。例如,内源性erp为p300、n400、p600、cnv(关联负变化)等。
[0087]
给予erp峰的名称通常包括极性和潜伏期,并且每个信号的峰具有单独的定义和含义。例如,正电位为p,负电位为n,并且p300是指刺激开始之后约300ms测量的正峰。另外,根据出现的顺序应用1、2、3或a、b、c等。例如,p3是指刺激开始之后波形中的第三正电位。
[0088]
在下文中,将描述各种erp。
[0089]
例如,n100与对不可预测的刺激的响应相关。
[0090]
mmn(失匹配负波)不仅可以由聚焦刺激生成,而且可以由非聚焦刺激生成。mmn可以用作感测存储器(回声存储器)在初始注意之前是否操作的指示符。以下将描述的p300出现在注意和做出判断的过程中,而mmn被分析为注意之前在脑中发生的过程。
[0091]
对于又一示例,n200(或n2)主要根据视觉和听觉刺激生成,并且与作为注意之后的记忆类型的短期记忆或长期记忆以及以下描述的p300相关。
[0092]
对于另一示例,p300(或p3)主要反映对刺激的注意、刺激认知、记忆搜索和不确定感觉的缓解,并且与区分来自外部的刺激的知觉决策相关。由于p300的生成与认知功能相关,因此无论所呈现的刺激的类型如何都会生成p300。例如,p300可以在听觉刺激、视觉刺激和躯体刺激中生成。p300被广泛应用于脑机接口的研究。
[0093]
对于又一示例,n400与语言处理相关,并且当呈现具有语义错误的句子或听觉刺激时引起。另外,n400与记忆过程相关,并且可以反映从长期记忆中检索或搜索信息的过程。
[0094]
对于又一示例,作为示出重建或回忆过程的指示符,p600与基于存储在长期记忆中的信息更准确地处理刺激的过程相关。
[0095]
对于又一示例,cnv是指在后阶段出现200ms至300ms并且甚至几秒钟的电位。它也被称为慢电位(sp),并且与预期、准备、精神启动、联想、注意和运动活动相关。
[0096]
对于又一示例,ern(error-related negativity,错误相关否定)或ne(error negativity,错误否定)是由差错或错误生成的事件相关电位(erp)。当受试者在感觉运动任务或类似任务中发生差错时可能会发生。更具体地,当受试者认识到差错或错误时,生成ern,并且其负峰主要出现在额叶区域和中心区域约50ms至150ms。特别是,它可能出现在很可能发生与运动响应相关的错误的情况下,并且还可能用于指示负面自我判断。
[0097]
在下文中,将更详细地描述ern的主要特征。
[0098]
图1是示出根据本公开的一种形式的ern的一般波形的视图。
[0099]
参考图1,在水平轴上方描绘负电位值,并且在水平轴下方描绘正电位值。另外,可以确认在针对任意运动的响应开始之后的预定时间范围内生成具有负峰值的erp。在本文中,响应可以是指发生差错或错误的情况(错误响应)。另外,预定时间范围可以为约50ms至150ms。可选地,预定时间范围可以为约0ms至100ms。同时,在正确响应的情况下,生成具有比ern相对小的负峰的erp。
[0100]
作为初始否定的erp,ern是时间锁定的,直到发生响应错误为止。另外,已知ern反映了与行为监测相关的多巴胺能系统的强化活动。ern包括额叶纹状体环,其包括嘴侧扣带区。同时,多巴胺与通常形成特定行为并激励人的脑的奖励系统相关联,从而提供愉悦和强化的感觉。当重复获取适当奖励的行为时,它被学习为习惯。另外,通过情绪学习释放更多的多巴胺,并且由于多巴胺的释放而尝试新的行为。因此,奖励驱动的学习被称为强化学习。
[0101]
另外,可以在通过额叶皮层引线的干扰任务(例如,go-nogo任务、stroop任务、flanker任务和simon任务)期间引起的错误响应开始之后的0ms至100ms内生成ern。
[0102]
另外,已知ern与以下描述的crn一起反映可以区分正确行为和错误行为的一般行为监测系统。
[0103]
另外,已知ern在额叶皮层电极处达到最大幅度的事实反映脑内发生器位于嘴侧扣带区或前扣带回皮层(dorsal anterior cingulate cortex,dacc)区中。
[0104]
另外,ern可能根据负面情绪状态示出幅度的变化。
[0105]
另外,即使在基于不同于内部运动表达的外部评估反馈处理执行行为监测的情况下,也可以报告ern,并且可以将ern分类为以下描述的frn。
[0106]
另外,ern不仅可以在已经认识到差错或错误时生成,而且可以在认识到差错或错误之前生成。
[0107]
另外,ern不仅可以被生成为对他/她自己的差错或错误的响应,而且可以被生成为对其他人的差错或错误的响应。
[0108]
另外,ern不仅可以被生成为对差错或错误的响应,而且可以被生成为对预定性能任务或对象的焦虑或压力的响应。
[0109]
另外,由于获取较大的ern峰值,因此可以认为它反映了更严重的过失或错误。
[0110]
同时,对于又一示例,作为在ern之后生成的事件相关电位(erp),pe(error positivity,错误肯定)是具有正值的erp,其在差错或错误之后的约150ms至300ms内主要在额叶皮层电极处生成。pe被称为认识到差错或错误并引起更多注意的反应。换句话说,pe与错误检测之后有意识的错误信息处理过程的指示符相关。ern和pe被称为与错误监测相关的erp。
[0111]
在下文中,将更详细地描述pe的主要特征。
[0112]
图2是示出根据本公开的另一形式的ern和pe的一般波形的视图。
[0113]
参考图2,在正电位值之上描绘负电位值。另外,可以确认在针对任意运动的响应开始之后的第一预定时间范围内生成具有负峰值的erp,即ern。在本文中,响应可以是指发生差错或错误的情况(错误响应)。另外,第一预定时间范围可以为约50ms至150ms。可选地,第一预定时间范围可以为约0ms至200ms。
[0114]
另外,可以确认在ern开始之后的第二预定时间范围内生成具有正峰值的erp,即pe。另外,第二预定时间范围可以为错误开始之后约150ms至300ms。可选地,第二预定时间范围可以是指约200ms至400ms。
[0115]
图3是示出本公开的一种形式的pe的偏转特性的视图。
[0116]
参考图3,与p3相似,pe具有宽偏转特性,并且丛发生器不仅包括后扣带回皮层和岛叶皮层的区域,而且包括更多的前扣带回皮层的区域。
[0117]
另外,pe可能反映错误的情绪评估和对类似p300的刺激的注意。另外,ern指示正确反应与错误反应之间的冲突,并且pe被认为是认识到错误并引起更加注意的反应。换句话说,可以在检测刺激的过程中生成ern,并且可以在处理刺激的过程中根据注意生成pe。当ern和/或pe分别具有相对较大的值时,已知该值与旨在在错误之后更缓慢且更准确地响应的自适应行为相关。
[0118]
图4a和图4b是示出根据本公开的一种形式的erp和pe的测量区域的视图。
[0119]
ern和pe被称为与错误监控相关的erp。关于ern和pe的测量区域,通常可以在中心区域中测量最大负值和最大正值。然而,根据测量条件可能存在一些差异。例如,图4a是测量ern的主要区域,并且通常可以在中线额叶区域或中心区域(即fcz)测量ern的最大负值。另外,图4b是测量pe的主要区域,并且与ern相比,通常可以在后中线区域测量pe的较大的
正值。
[0120]
同时,对于又一示例,frn(反馈相关否定)是与基于外部评估反馈获取的错误检测相关的事件相关电位(erp)。ern和/或pe基于内部监测过程检测错误。然而,在frn的情况下,当基于外部评估反馈获取时,它可能类似于ern的过程进行操作。
[0121]
另外,frn和ern可以共享许多电生理特性。例如,frn在负反馈开始之后约250ms至300ms在额叶皮层电极处具有负峰值,并且可以与ern一样在前扣带回皮层(dacc)区域中生成。
[0122]
另外,与ern一样,frn可以反映多巴胺能系统的强化学习活动。另外,frn通常具有比正反馈更大的负值,并且对于不可预见的情况可能具有比可预测的结果更大的值。
[0123]
对于又一示例,crn(correct-related negativity,正确相关否定)是由正确试验生成的erp,并且是小于ern的负值。与ern一样,crn可以在初始潜伏期(例如,0ms至100ms)中生成。图5是示出本公开的一种形式的ern和crn的一般波形的视图。
[0124]
对于又一示例,pc(correct positivity,正确肯定)是在crn之后生成的事件相关电位。它是在正确响应开始之后约150ms至300ms内生成的事件相关电位。crn与pc的关系可类似于ern与pe的关系。
[0125]
同时,erp可以被分类为刺激锁定的erp和响应锁定的erp。刺激锁定的erp和响应锁定的erp可以根据类似erp的诱发原因和响应时间的准则来划分。例如,从单词或图片从外部呈现给用户的时刻诱发的erp可以被称为刺激锁定的erp。另外,例如,从用户说话或按下按钮的时刻诱发的erp可以被称为响应锁定的erp。因此,基于上述准则,通常,刺激锁定的erp为n100、n200、p2、p3等,并且响应锁定的erp为ern、pe、crn、pc、frn等。
[0126]
同时,脑电波可以根据表现动机分类。脑电波可以被分类为由用户的意愿表现的自发脑电波(自发电位)和根据外部刺激而不考虑用户的意愿自然表现的诱发脑电波(诱发电位)。自发脑电波可以在用户自己移动或想象运动时表现,而诱发脑电波可以例如通过视觉刺激、听觉刺激、嗅觉刺激和触觉刺激表现。
[0127]
同时,可以根据国际10至20系统来测量脑电波信号。国际10至20系统基于电极的位置与大脑皮层区域之间的关系来确定脑电波信号的测量点。
[0128]
图6是示出根据本公开的一种形式的对应于大脑皮层区域的eeg测量通道的视图。
[0129]
参考图6,脑区域(前额叶皮层fp1、fp2;额叶皮层f3、f4、f7、f8、fz、fc3、fc4、ft7、ft8、fcz;顶叶皮层c3、c4、cz、cp3、cp4、cpz、p3、p4、pz;颞叶皮层t7、t8、tp7、tp8、p7、p8;枕叶皮层o1、o2、oz)对应于32个脑电波测量通道。对于每个通道,可以获取数据,并且可以通过使用该数据对每个大脑皮层区域执行分析。
[0130]
图7是示出根据本公开的实施方式的使用错误监视的交通事故分析系统的配置的框图。
[0131]
交通事故通常由人为因素、车辆因素和道路环境因素引起。大多数交通事故是由人为因素引起的。特别是,人为因素包括驾驶员的过失、粗心、驾驶不良、困倦、醉酒和不遵守交通规则,而车辆因素包括设计和功能上的缺陷以及维护疏忽。此外,道路环境因素包括道路设计、维护疏忽、施工、天气、能见度和照明。
[0132]
当感知到过失或错误时,发生响应锁定的erp。另外,响应锁定的erp不仅可以作为对他/她自己的过失或错误的响应而生成,而且可以作为对其他人的过失或错误的响应而
生成。此外,响应锁定的erp可以作为对预定性能任务或对象的焦虑或压力的响应而生成。在此,响应锁定的erp可以包括ern、pe、crn、pc和frn。
[0133]
同时,可以在交通事故发生之前和之后的预定时间范围内观察到乘客或观察者的脑波信号的急剧变化。换句话说,由于脑波信号是一种生物信号,其可以直接和间接地反映人的有意识或无意识状态,因此,交通事故对移动体冲击造成的感觉,或交通事故前后的乘客或观察者的焦虑、压力,或驾驶过失或错误的感觉可导致乘客或观察者的脑波信号发生急剧变化。在此,驾驶员违反交通法规或造成交通事故的行为可被视为一种过失或错误。
[0134]
因此,当在交通事故之前和之后的预定时间范围内分析与交通事故有关的观察者的脑波信号时,可以获取针对焦虑,压力,过失和错误而生成的响应锁定的erp。
[0135]
这里,与交通事故有关的观察者可以是作为交通事故的直接对象的移动体的乘客。另外,可以包括目击相应交通事故或间接影响交通事故或受到交通事故影响的移动体的乘客和/或观察者。
[0136]
另外,移动体可以涵盖车辆、移动/运输装置等的含义。
[0137]
同时,一旦发生交通事故,相应的移动体通常会受到预定的冲击。因此,当检测到预定冲击的发生时,可以确定对应的移动体是否已经发生交通事故。另外,可以通过使用包括在对应的移动体中的各种感测装置来检测预定冲击的发生。
[0138]
另外,当通常获取的erp的峰值较大时,响应锁定的erp可以被认为反映了更严重的过失或错误。因此,可以通过比较与交通事故有关的多个观察者之间的erp的幅度来选择对交通事故负有更大责任或对交通事故具有更大动机的观察者。
[0139]
例如,当超速行驶的车辆与另一辆车相撞时,与被撞的另一辆车的驾驶员相比,超速行驶的驾驶员可能已经意识到发生交通事故的可能性更大。
[0140]
对于另一个示例,当超速行驶的车辆与另一车辆碰撞时,与被撞的另一车辆的驾驶员相比,超速行驶的驾驶员可能已经在更早的时间感知到交通事故的发生。
[0141]
又例如,与没有受到这种影响的另一个驾驶员的脑波信号相比,在酒精或嗜睡的影响下驾驶员的脑波信号可以更好地反映驾驶员的精神状态,例如焦虑和压力。此外,当考虑响应锁定erp的功能时,驾驶员的脑波信号不仅可以在驾驶员意识到的情况下而且可以在驾驶员未意识到的其他情况下反映他/她的精神状态,例如焦虑和压力。
[0142]
本公开的交通事故分析系统可通过使用从见证发生交通事故的移动体的观察者处获取的响应锁定erp来确定移动体之间交通事故的主要责任。另外,交通分析系统可以将移动体之间交通事故的主要责任表示为一个具体的数字。
[0143]
参照图7,交通事故分析系统700可以包括错误监视装置710或交通控制服务器720或两者。然而,应当注意,仅示出了用于解释本实施方式所必需的一些组件,并且交通事故分析系统700中包括的组件不限于该实施方式。例如,可以在一个组成单元中实现两个或更多个组成单元,并且可以在两个或更多个组成单元中划分和执行在一个组成单元中执行的操作。另外,可以省略一些组成单元,或者可以添加其他组成单元。
[0144]
本公开的错误监视装置710可以将移动体的错误信息发送到服务器。
[0145]
例如,错误监视装置710可以确定第一移动体是否已经发生预定事件。另外,错误监视装置710可以在预定时间内收集第一移动体中的至少一名乘客的erp。另外,错误监视装置710可以分析在预定时间内收集的erp。另外,基于分析的结果,错误监视装置710可以
将第一移动体的错误信息发送到交通控制服务器720。
[0146]
这里,预定事件可以表示与第一移动体有关的交通事故。第一移动体可以是作为交通事故的主要原因的移动体。可替代地,第一移动体可以包括不是交通事故的主要原因的移动体或与交通事故有关但不是交通事故的对象的移动体。
[0147]
在这种情况下,第一移动体的错误信息可以包括关于第一移动体中的至少一名乘客何时发生erp的时间信息,erp的波形,以及第一移动体的位置信息和/或操作信息。
[0148]
在下面的图9和图10中描述了错误监视装置710的进一步的详细操作。
[0149]
本公开的交通控制服务器可以通过使用从错误监视装置710接收的移动体的错误信息来确定对相应交通事故负主要责任的移动体。
[0150]
例如,交通控制服务器720可以通过使用从错误监视装置710接收的移动体的错误信息来识别移动体发生的预定事件。另外,交通控制服务器720可以在接收到错误信息的多个移动体中选择与由此识别的预定事件相关的移动体。例如,在多个移动体中,可以选择通常识别预定事件的移动体。另外,在多个移动体中,可以选择通常具有所识别的交通事故事件的移动体。因此,可以选择与同一交通事故有关的移动体。另外,交通控制服务器720可以通过数值来表达对于所选移动体之间的相应交通事故的责任程度。另外,交通控制服务器720可以基于数值来确定对相应交通事故负主要责任的移动体。
[0151]
这里,交通控制服务器720可以是指能够通过收集和分析由移动体给出的数据来识别和分析移动体之间交通事故之前和之后的过程的服务器。例如,交通控制服务器720可以指地区警察局的交通控制中心服务器。
[0152]
交通控制服务器720的进一步详细操作在下面的图11中描述。
[0153]
图8是示出根据本公开的实施方式的错误监视装置的配置的框图。
[0154]
参照图8,错误监视装置800可以包括检测单元810、感测单元820、分析单元830和/或传输单元840。然而,应当注意,仅示出了用于解释本实施方式所需的一些组件,并且错误监视装置800中包括的组件不限于该实施方式。例如,可以在一个组成单元中实现两个或更多个组成单元,并且可以在两个或更多个组成单元中划分和执行在一个组成单元中执行的操作。另外,可以省略一些组成单元,或者可以添加其他组成单元。
[0155]
同时,图8的错误监视装置800可以是图7的错误监视装置710的实施方式。
[0156]
本公开的错误监视装置800可以确定第一移动体上是否已经发生预定事件。另外,检测单元810可以执行该操作。
[0157]
这里,预定事件可以表示与第一移动体有关的交通事故。第一移动体可以是作为交通事故的主要原因的移动体。可替代地,第一移动体可以包括不是交通事故的主要原因的移动体或与交通事故有关但不是交通事故的对象的移动体。
[0158]
本公开的错误监视装置800可以通过使用第一移动体的至少一个感测装置确定第一移动体上是否已经发生预定事件。另外,感测单元820可以包括感测装置。
[0159]
一旦发生交通事故,相应的移动体通常会受到预定的影响。因此,当检测到预定冲击的发生时,可以确定对应的移动体上是否已经发生交通事故。另外,可以通过使用包括在对应的移动体中的各种感测装置来检测预定冲击的发生。
[0160]
这里,感测装置可以包括速度测量装置、图像获取装置、车轮监视装置和操纵装置。操纵装置可以监视方向盘/油门踏板/制动器的操作。
[0161]
例如,当第一移动体的速度或方向在预定时间范围内超过预定阈值时,错误监视装置800可以确定第一移动体已经发生预定事件。
[0162]
对于另一示例,当在第一移动体内部或外部产生的声音的量在预定时间范围内超过预定阈值时,错误监视装置800可以确定第一移动体上已经发生预定事件。
[0163]
对于又一示例,当第一移动体与另一移动体之间的距离在预定时间范围内低于预定阈值时,错误监视装置800可以确定第一移动体已经发生预定事件。
[0164]
对于又一示例,当第一移动体的车轮的内部温度和/或车轮的内部压力在预定时间范围内超过预定阈值时,错误监视装置800可以确定第一移动体上已经发生预定事件。
[0165]
对于又一示例,当第一移动体的方向盘、加速器踏板和制动器上的力或压力的大小在预定时间范围内超过预定阈值时,错误监视装置800可以确定第一移动体已经发生预定事件。
[0166]
预定时间范围可以由用户输入或为预设值,并且根据每个感测装置而变化。
[0167]
预定阈值可以由用户输入或为预设值,并且阈值的幅度和/或单位可以根据每个感测装置而变化。
[0168]
错误监视装置800可以在预定时间内收集移动体中的至少一名乘客的erp。另外,感测单元820可以执行该操作。
[0169]
在此,erp可以表示响应锁定的erp。另外,响应锁定的erp可以包括ern、pe、crn、pc和frn。此外,除了ern、pe、crn、pc和frn外,还可以包括在响应发生后(即响应开始)获取的其他erp。另外,响应锁定的erp可以包括多个erp。
[0170]
另外,本文中,在预定时间收集erp可以包括测量移动体中至少一名乘客的脑波信号,并从所测量的脑波信号中检测erp。
[0171]
如图1至图6所示,可以生成ern、pe、crn、pc和/或frn作为对诸如过失或错误之类的错误行为的响应或对正确行为的响应。因此,如果使用erp,则可以确定相应的乘客是否执行了错误的行为。而且,基于该确定,可以控制移动体以适合某种目的。
[0172]
例如,当驾驶员必须向右转而左转时或当驾驶员不得不向左转而继续直行时,可产生ern和/或pe。
[0173]
作为另一示例,在根据导航系统的引导进行驾驶时,如果驾驶员未能根据引导进行移动,则可产生ern和/或pe。
[0174]
作为又一示例,当驾驶员在交通拥挤中第一次航向或在道路上经受紧张和压力的情况时,可产生ern和/或pe。
[0175]
作为又一示例,由于交通事故对移动体的冲击而引起的感觉,也可能是由于交通事故前后乘客或观察者感到的焦虑、压力和驾驶过失或错误,可产生ern和/或pe。
[0176]
作为又一示例,当驾驶员违反交通规则或做某事导致交通事故时,可产生ern和/或pe。
[0177]
另外,预定时间可以表示在特定响应开始后约0~400ms。另外,预定时间可以包括可以获取上述响应锁定erp的时间范围。另外,预定时间可以根据响应锁定的erp的类型而变化,并且可以具有多个时间范围。例如,可以给出第一时间范围以获取第一erp,并且可以给出第二时间范围以获取第二erp。
[0178]
例如,当第一erp是ern并且第二erp是pe时,第一时间范围大约为作为ern的主要
测量区间的0~150ms,第二个时间范围大约为作为pe的主要测量区间的150ms到400ms。图9是示出根据本公开实施方式的当目标erp为ern和pe时的测量时间范围的视图。参照图8,可以在第一时间范围910中获取ern,并且可以在第二时间范围920中获取pe。
[0179]
又例如,当第一erp是ern且第二erp是crn时,第一时间范围可以大约为作为ern的主要测量区间的0~200ms,且第二时间范围可以大约为作为crn的主要测量区间的0到200ms。
[0180]
另外,该乘客不仅可以包括驾驶员,而且可以包括移动体中的其它乘客。
[0181]
当本公开的错误监视装置800确定第一移动体上已经发生预定事件时,可以分析在预定时间内收集的erp。另外,分析单元830可以执行该操作。
[0182]
这里,分析可以包括将在预定时间内收集的erp的幅度和预定阈值进行比较的过程。
[0183]
同时,阈值可以是预设值或用户输入的值。另外,对于从其收集erp的每个乘客,阈值可以具有不同的幅度。例如,它可以是反映每个乘客的脑波信号特性的值。为了反映脑波信号特性的分析结果,可以预先为乘客的脑波信号中显示的响应锁定的erp特征执行预定的学习过程。另外,阈值可以根据erp的类型而变化并且可以具有多个阈值。图10是示出根据本公开的实施方式的当目标erp分别是ern和pe时比较目标erp和预定阈值的过程的视图。参照图10,在ern的情况下,可以将其幅度与第一阈值1010进行比较。在pe的情况下,可以将其幅度与第二阈值1020进行比较。
[0184]
另外,分析可以包括判断在预定时间间隔内erp的幅度是否大于或等于预定阈值(即,超过预定阈值范围)的处理。参照图10,在ern的情况下,可以将ern的幅度与第一阈值1010进行比较以确定在第三时间范围1012期间ern的幅度是否大于或等于第一阈值1010。在pe的情况下,可以将pe的幅度与第二阈值1020进行比较以确定在第四时间范围1022期间pe的幅度是否小于或等于第二阈值1020。
[0185]
另外,可以通过使用每个乘客的脑波信号模板来执行分析。在此,脑波信号模板可以是指在时域中的脑波信号,其是在针对任意运动的响应开始之后的预定时间范围内预先获取的。该响应可以包括错误,过失,正确的响应等。在分析过程中可以缩放现成的脑波信号模板。换句话说,脑波信号图的幅度可以预定速率增加或减小。例如,可以通过将在预定时间内获取的单个erp和/或多个erp的幅度-时间图波形与预先确定的脑波信号模板进行比较来执行分析。
[0186]
同时,可以在分析之前进行如下处理:通过使用脑波信号的特征出现的时间和/或使用脑波信号的模式来识别erp的发生。另外,分析可以包括提取erp的过程。
[0187]
另外,用于分析的erp可以是在预定时间内收集的erp的统计值。例如,统计值可以表示平均值、加权平均值、最大值或最小值。
[0188]
基于分析单元830的分析结果,本公开的错误监视装置800可以将第一移动体的错误信息发送到交通控制服务器。另外,发送单元840可以执行该操作。
[0189]
这里,第一移动体的错误信息可以包括关于何时发生erp的时间信息,erp的波形,以及第一移动体的位置信息和/或操作信息。
[0190]
这里,erp可以是第一移动体中至少一名乘客的事件相关的电位。
[0191]
关于erp发生的时间信息可以表示针对erp的响应发生的时间。换句话说,参考图
10,它可以表示响应开始时间。例如,当erp是ern时,由于ern的主要测量区间在响应开始后大约为0~150ms,因此可以通过从ern的测量时间点减去大约0到150ms来获取有关erp开始的时间信息。
[0192]
替代地,关于erp开始的时间信息可以是对应的erp的测量时间点。
[0193]
另外,第一移动体的位置信息可以表示第一移动体在erp的测量时间点的位置。同时,可以通过使用gps和其他各种类型的位置识别系统来获取第一移动体的位置。可替代地,可以通过使用第一移动体的行进方向和有效速度,道路坡度等来获取第一移动体的位置。
[0194]
另外,第一移动体的操作信息可以表示引起erp的第一移动体的操作。例如,它可包括第一移动体越过中心线,超速和违反交通信号灯或其他规则以及第一移动体与第二移动体发生碰撞。
[0195]
同时,可以从诸如包括在第一移动体中的相机的图像获取装置获取第一移动体的操作信息。
[0196]
图11是示出根据本公开的实施方式的交通控制服务器的配置的框图。
[0197]
参照图11,交通控制服务器1100可以包括接收器1110和/或控制器1120。然而,应当注意,仅示出了用于解释本实施方式所需的一些组件,并且交通控制服务器1100中包括的组件不限于该实施方式。例如,可以在一个组成单元中实现两个或更多个组成单元,并且可以在两个或更多个组成单元中划分和执行在一个组成单元中执行的操作。另外,可以省略一些组成单元,或者可以添加其他组成单元。
[0198]
同时,图11的交通控制服务器1100可以是图7的交通控制服务器720的实施方式。
[0199]
本公开的交通控制服务器1100可以从第一移动体接收第一移动体的错误信息。另外,接收器1110可以执行该操作。
[0200]
这里,第一移动体的错误信息可以包括关于第一移动体中的至少一名乘客何时发生erp的时间信息、erp的波形、以及第一移动体的位置信息和操作信息。
[0201]
本公开的交通控制服务器1100可以基于第一移动体的错误信息针对第一移动体上发生的第一事件确定责任程度。在此,控制器1120可执行操作。
[0202]
更具体地,交通控制服务器1100可以通过使用第一移动体的错误信息识别第一移动体上发生的第一事件。
[0203]
这里,识别第一移动体上发生的第一事件可以是指识别与第一移动体有关的交通事故状况。
[0204]
作为一例,交通控制服务器1100可以通过使用第一移动体的位置信息、关于erp的发作的时间信息等来识别交通事故发生的位置和时间。
[0205]
对于另一示例,交通控制服务器1100可以通过检查从通过距第一移动体的位置预定范围内的闭路电视(cctv)系统产生事件相关电位时的预定时间范围内的交通事故,来识别发生在第一移动体的交通事故。
[0206]
对于又一示例,交通控制服务器1100可以从安装在距第一移动体的位置预定范围内的诸如cctv之类的图像获取装置获取图像和声音信息。另外,交通控制服务器1100可以通过使用获取的信息和/或第一移动体的错误信息针对在第一移动体上发生的第一事件确定责任程度。
[0207]
另外,交通控制服务器1100还可以从与第一移动体不同的第二移动体中接收至少一个第二移动体的错误信息。另外,接收器1110可以执行该操作。
[0208]
另外,交通控制服务器1100可以通过使用第二移动体的错误信息来识别发生在第二移动体上的第二事件。
[0209]
这里,第二事件可以表示与第二移动体有关的交通事故。第二移动体可以是作为交通事故的主要原因的移动体。可替代地,第二移动体可以包括不是交通事故的主要原因的移动体或者与交通事故有关但不是交通事故的对象的移动体。
[0210]
另外,交通控制服务器1100可以选择具有与第一事件相同的第二事件的第二移动体。在此,识别发生在第二移动体上的第二事件可以是指识别与第二移动体有关的交通事故状况。可以通过比较在第一移动体上发生的第一事件和在第二移动体上发生的第二事件来选择与同一事件有关的移动体。
[0211]
另外,交通控制服务器1100可以针对在第一移动体和选择的第二移动体之间发生第一事件确定责任程度。在此,控制器1120可执行操作。
[0212]
这里,针对第一事件的发生确定责任程度可以是指确定指示第一移动体和第二移动体对相应的交通事故负责的错误率。在此,责任程度可以表示为数值。
[0213]
例如,责任程度可以与第一移动体的erp的峰值和第二移动体的erp的峰值成比例。
[0214]
对于另一个示例,可以基于显示第一移动体的erp和第二移动体的erp的时间点来确定责任程度。
[0215]
图12是示出根据本公开的实施方式的使用错误监视的交通事故分析系统的操作方法的流程图。
[0216]
本公开的交通事故分析系统可以包括:错误监视装置1200,其传送移动体的错误信息,和/或交通控制服务器1210,其通过使用移动体的错误信息针对移动体之间发生的预定事件确定责任程度。
[0217]
参照图12,错误监视装置1200可以确定是否已经发生在预定事件第一移动体上(s1202)。
[0218]
另外,错误监视装置1200可以在预定时间内对第一移动体中的至少一名乘客收集erp(s1204)。
[0219]
另外,错误监视装置1200可以分析在预定时间内收集的erp(s1206)。
[0220]
这里,erp可以包括错误相关否定(ern)和错误肯定(pe)中的至少一个。另外,erp可以进一步包括正确相关否定(crn)和正确肯定(pc)中的至少一个。
[0221]
另外,本文中,收集预定时间的erp可以包括测量在移动体中至少一名乘客的脑波信号,并从所测量的脑波信号中检测erp。
[0222]
另外,基于步骤s1206的分析结果,错误监视装置1200可以将第一移动体的错误信息发送给交通控制服务器1210(s1208)。
[0223]
这里,分析可以是指将在预定时间内收集的erp的幅度与预定阈值进行比较。另外,分析可以是指确定在预定时间间隔内erp的幅度是否在预定阈值范围内。
[0224]
同时,可以在分析之前进行如下处理:通过使用脑波信号的特征出现的时间和/或使用脑波信号的模式来识别erp的发生。另外,分析可以包括提取erp的过程。
[0225]
这里,可以根据所述事件相关电位的类型和从其获取了所述事件相关电位的乘客中的至少一者来不同地确定预定阈值。
[0226]
另外第一移动体的错误信息可以包括关于第一移动体中的至少一名乘客何时发生erp的时间信息、erp的波形、以及第一移动体的位置信息和操作信息。
[0227]
同时,交通控制服务器1210可以从错误监视装置1200接收第一移动体的错误信息(s1208)。
[0228]
另外,交通控制服务器1200可以基于第一移动体的错误信息来确定第一移动体发生第一事件的负责程度(s1212)。备选地,交通控制服务器1210可以选择与第一移动体不同的至少一个第二移动体,并针对第一移动体和第二移动体之间的第一事件确定责任程度。
[0229]
图13是示出根据本公开的实施方式的当第一移动体与先前的第二移动体碰撞时交通事故分析系统的操作的视图。
[0230]
参照图13,假定第一移动体1301与沿相同方向行进的先前的第二移动体1302碰撞(在下文中,称为“后端碰撞”)。
[0231]
本公开的错误监视装置可以确定第一移动体1301上是否发生了后端碰撞。在此,可以基于第一移动体1301中包括的速度测量单元,图像获取单元,声音获取单元,车轮监视单元和/或操纵装置单元来确定是否发生了后端碰撞。
[0232]
另外,错误监视装置可以在预定的时间内从第一移动体1301中的至少一名乘客收集erp。从后端碰撞之前开始,erp能够被连续或定期测量和存储。错误监视装置可以存储erp的显示时间,第一移动体1301的位置信息等。此外,错误监视装置还可以存储erp的波形,第一移动体1301的操作信息等。
[0233]
另外,错误监视装置可以将收集和存储的信息发送到交通控制服务器。例如,交通控制服务器可以是地区警察局的交通控制中心服务器。
[0234]
本公开的交通控制服务器可以通过使用从错误监视装置接收的信息针对第一移动体1301与第二移动体1302碰撞确定责任程度。特别地,交通控制服务器可以基于所接收的信息来识别第一移动体上发生的交通事故。换句话说,它可以确定交通事故的位置和时间。
[0235]
另外,本公开的交通控制服务器可以进一步从不同于第一移动体1301的移动体接收错误信息。参照图13,交通控制服务器可以进一步从第二移动体1302接收第二移动体1302的错误信息。另外,交通控制服务器可以识别发生在第二移动体1302上的交通事故,并确定第二移动体1302发生的交通事故是否与第一移动体1301发生的交通事故相同。
[0236]
本公开的交通事故分析系统可以确定交通事故通常发生在第一移动体1301和第二移动体1302之间的交通事故的责任信息。换句话说,交通事故分析系统可以利用从中显示erp的驾驶员或乘客的角度更紧密地分析交通事故情况。
[0237]
例如,责任程度可以与第一移动体的erp的峰值和第二移动体的erp的峰值成比例。
[0238]
对于另一个示例,可以基于显示第一移动体的erp和第二移动体的erp的时间点来确定责任程度。
[0239]
同时,第二移动体1302可以不具有与第一移动体1301相同的驱动方向,并且可以不位于第一移动体1301之前。与行驶方向或行驶速度无关,可以包括第一移动体1301与第
二移动体1302碰撞的各种情况。
[0240]
根据本公开,可以提供交通事故分析系统。
[0241]
此外,根据本公开,可以提供基于错误监视来确定对于两个移动体之间的交通事故的主要责任的交通事故分析系统。
[0242]
此外,根据本公开,可以提供错误监视装置和方法。
[0243]
此外,根据本公开,可以提供一种基于错误监视确定对移动体之间的交通事故的主要责任的交通控制服务器及其操作方法。
[0244]
在本公开中获取的效果不限于上述效果,并且根据以下描述,本领域技术人员可以清楚地理解上述未提及的其他效果。
[0245]
尽管为了描述的清楚起见,将本公开的示例性方法描述为一系列操作步骤,但是本公开不限于上述操作步骤的顺序或次序。操作步骤可以同时执行,或者可以顺序执行但以不同顺序执行。为了实施本公开的方法,可以添加附加的操作步骤和/或可以消除或替代现有的操作步骤。
[0246]
本公开的各种形式没有被呈现为描述所有可用的组合,而是被呈现为仅描述代表性的组合。各种形式的步骤或元件可以单独使用或可以组合使用。
[0247]
另外,可以以硬件、固件、软件或其组合的形式来体现本公开的各种形式。当本公开体现在硬件组件中时,它可以是例如专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑设备(pld)、现场可编程门阵列(fpga)、通用处理器、控制器、微控制器、微处理器等。
[0248]
本公开的范围包括使得能够在设备或计算机上执行各种形式的方法的软件或机器可执行指令(例如,操作系统(os)、应用、固件、程序),以及一种非暂时性计算机可读介质,用于存储此类软件或机器可执行指令,以便可以在设备或计算机上执行该软件或指令。
[0249]
本公开的描述本质上仅是示例性的,因此,不背离本公开的实质的变型意图在本公开的范围内。这样的变化不应被视为背离本公开的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1