基于高速公路的动态自动驾驶专用车道及其使用方法与流程
[0001]
本发明涉及自动驾驶技术领域,特别涉及基于高速公路的动态自动驾驶专用车道及其使用方法。
背景技术:
[0002]
随着5g、云计算、大数据、物联网等新技术的发展,以及大众对智慧化美好生活的需要,行业内已普遍达成共识,自动驾驶会成为未来几十年的前瞻发展方向,加持最近新基建的重大利好,自动驾驶产业迎来了盛大机遇,产业链上下游各方争相布局谋划、研究测试,然而由于成本、技术等多方面原因,自动驾驶车辆还难以形成规模达到量产,未来道路上自动驾驶车辆的流量也难以确切估计,那么是否设置自动驾驶专用车道(以下简称专用道)则成为一大难点。
[0003]
同等道路规模下若选择其中一条道路,单独设置自动驾驶专用道,虽然能够有效保障自动驾驶车辆的行驶安全,且有效提升其通行效率,显著降低排放与油耗,但是由于专用道占用了大量的空间资源,若自动驾驶专用道利用率不高,则会加剧交通拥堵,增加社会车辆的平均延误;若保持社会车辆的道路规模不变,另外再增加自动驾驶专用道,则征用土地、建设、运营等成本则会剧增,而且在自动驾驶车辆流量较小的情况下,投入大,产出小,边际成本较高,经济效益和社会效益不显著。
[0004]
因此,如何针对自动驾驶车辆提高道路的利用效率成为本领域技术人员急需解决的技术问题。
技术实现要素:
[0005]
有鉴于现有技术的上述缺陷,本发明提供基于高速公路的动态自动驾驶专用车道及其使用方法,实现的目的是实现高速公路自动驾驶车辆专用车道对社会车辆时空路权的动态管理,保证自动驾驶车辆的安全快速通行,提高道路的利用效率。
[0006]
为实现上述目的,本发明公开了基于高速公路的动态自动驾驶专用车道,所述专用车道与普通车道之间设有若干智能道钉进行间隔;
[0007]
设有所述专用车道的高速公路对应所述专用车道的位置设有若干雷视一体机;若干雷视一体机的检测范围覆盖所述专用车道,用于跟踪自动驾驶车辆在所述专用车道行驶的位置,并检测所述自动驾驶车辆是否进入所述专用车道,并对行驶于所述专用车道中所述智能道钉闪亮范围的所述社会车辆进行抓拍;
[0008]
所述高速公路设有所述专用车道的路段的入口匝道和出口匝道均设有自动驾驶车辆检测器;
[0009]
所述高速公路上,位于每一所述入口匝道汇入点的所对应所述专用车道的临近指定位置均设有可变信息标志;
[0010]
当每一对相邻的所述入口匝道和所述出口匝道之间没有所述自动驾驶车辆时,相应的所述可变信息标志以及相应的若干所述智能道钉均处于关闭状态,所述专用车道用于
通行社会车辆;
[0011]
当所述自动驾驶车辆驶入所述入口匝道之后,与所述入口匝道对应的若干所述道钉以初始闪亮方式闪光,所述可变信息标志发出所述专用车道仅能通行所述自动驾驶车辆的声音和/或光学提示,用于提醒行驶于所述专用车道的所有所述社会车辆离开所述专用车道,以及提醒相邻车道的社会车辆禁止驶入所述专用车道的所述道钉闪亮范围;
[0012]
当所述自动驾驶车辆驶入所述专用车道,位于所述自动驾驶车辆前方的清空距离和所述自动驾驶车辆后方的安全距离内的若干所述道钉以运行闪亮方式闪光,并随着所述自动驾驶车辆移动,用于提醒相邻车道社会车辆禁止驶入所述专用车道的所述道钉闪亮范围。
[0013]
优选的,所述可变信息标志布设在合理区间内,所述合理区间的计算公式如下,以下公式以所述专用车道的行车方向为x轴正方向,下述点位位置大小比较参照位于x轴的位置,沿x轴正方向,依次设3号位置x
3
、1号位置x
1
、2号位置x
2
:
[0014][0015][0016]
s
v
=s
a
∪s
b
;
[0017]
其中,c为高速公路上匝道入口处检测到自动驾驶车辆a开始驶入后,经过可变信息标志位置进入专用道的最后一辆社会车辆;
[0018]
所述a为从匝道驶入,进入到高速路网中的自动驾驶车辆;
[0019]
s
a
为可变信息标志布设的可选点位a,且x
1
≤s
a
≤x
2
;
[0020]
s
b
为可变信息标志布设的可选点位b,且s
b
≤x
3
;
[0021]
s
v
为可变信息标志布设的可选位置;
[0022]
l
c
为所述自动驾驶车辆与前方社会车辆的清空距离,单位m;
[0023]
l
s
为所述自动驾驶车辆与后方社会车辆的安全距离,单位m;
[0024]
t为所述自动驾驶车辆从所述入口匝道检测器位置到汇入所述自动驾驶专用道的行驶时间,单位s;
[0025]
minv
c
为所述社会车辆的最小行驶速度,单位m/s;
[0026]
maxv
c
为所述社会车辆的最大行驶速度,单位m/s;
[0027]
为所述自动驾驶车辆以最大速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置;
[0028]
为所述自动驾驶车辆以最小速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置。
[0029]
优选的,所述初始闪亮方式闪光的若干所述智能道钉的长度的计算公式如下:
[0030][0031]
其中,为所述自动驾驶车辆以最大速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置;
[0032]
s
v
为可变信息标志布设的可选位置;
[0033]
l
c
为所述自动驾驶车辆与前方社会车辆的清空距离,单位m。
[0034]
优选的,所述运行闪亮方式闪光的若干所述智能道钉的范围为自动驾驶车辆所在区域及满足安全距离和清空距离的区域之和,计算方法如下:
[0035]
将所述专用车道按总长度等距分段,每段长度为50m至100m,所述运行闪亮方式闪光的若干所述智能道钉的范围=所述自动驾驶车辆行驶位置所在的所述分段+清空距离所处的所述分段+安全距离所处的所述分段,所述清空距离l
c
的计算公式如下:
[0036][0037]
其中,为所述行驶于自动驾驶专用道上的所述自动驾驶车辆在反应时间内最大行驶距离,单位m;
[0038]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆发现前车骤停所需最大安全制动距离,单位m;
[0039]
为所述前方车辆在反应时间内最大行驶距离,单位m;
[0040]
为所述前车发现后方来车时换道所需最大距离,单位m;
[0041]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的反应时间,单位s;
[0042]
maxv
a
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最大车速,单位km/h;
[0043]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最小制动加速度m/s
2
;
[0044]
为所述前车的最大反应时间,单位s;
[0045]
maxv
f
为所述前车的最大车速,单位km/h;
[0046]
为所述前车换道横向最大偏移距离,单位m。
[0047]
优选的,所述安全距离l
s
的计算公式如下:
[0048][0049][0050][0051][0052]
其中,为所述后方车辆在反应时间内最大行驶距离,单位为m;
[0053]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆时,换道所需最大距离,单位为m;
[0054]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆骤停时,所需的最大安全制动距离,单位为m;
[0055]
为所述后车的最大反应时间,单位为s;
[0056]
maxv
r
为所述后车的最大车速,单位为km/h;
[0057]
为所述后车换道横向最大偏移距离,单位为m;
[0058]
为所述后车的最小制动加速度m/s
2
。
[0059]
本发明还提供基于高速公路的动态自动驾驶专用车道的使用方法,步骤如下:
[0060]
在所述自动驾驶车辆未驶入所述入口匝道,或者所述专用车道没有所述自动驾驶车辆行驶时,所述可变信息标志和所有所述智能道钉均处于关闭状态,所有所述雷视一体机均不进行抓拍,所述专用车道用于通行社会车辆;
[0061]
在所述自动驾驶车辆已驶入所述入口匝道,但并未驶入所述专用车道时,所述可变信息标志显示所述专用车道为自动驾驶车辆专用,提醒所述后方车辆不得驶入所述自动驾驶车辆专用车道,所有所述智能道钉均以初始闪亮方式闪光,请行驶于所述专用车道所述智能道钉闪亮范围内的所有所述社会车辆离开所述专用车道;所有所述雷视一体机开始抓拍进入所述专用车道的社会车辆以及10s内不离开所述自动驾驶专用车道的所述社会车辆;
[0062]
在所述自动驾驶车辆汇入所述专用车道时,所述可变信息标志开始变化,显示所述专用车道可以为社会车辆使用,所有所述智能道钉均以运行闪亮方式闪光,闪亮范围随着所述自动驾驶车辆行驶位置的变化而动态变化,所有所述雷视一体机均抓拍进入所述智能道钉闪亮范围内的所述社会车辆;
[0063]
当多辆自动驾驶车辆同时对所述专用车道触发请求时,所述专用车道按照并的逻辑响应;
[0064]
在所述自动驾驶车辆驶出所述出口匝道时,且所述专用车道范围内没有其他所述自动驾驶车辆行驶时,所有所述智能道钉均关闭,所有所述雷视一体机均不进行抓拍,所述专用车道用于通行所述社会车辆。
[0065]
本发明的有益效果:
[0066]
本发明通过合理设置动态自动驾驶专用道,在自动驾驶车辆流量较小的情况下,大幅降低投入产出比,即投入少,产出高,提高高速公路的通行效率及车道资源利用率。
[0067]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0068]
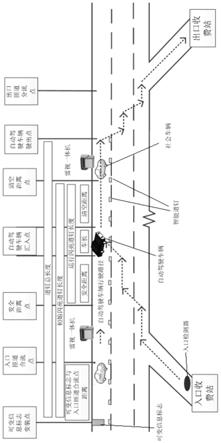
图1示出本发明一实施例的结构示意图。
[0069]
图2示出本发明一实施例的使用过程流程图。
[0070]
图3示出本发明一实施例中可变信息标志布设位置合理区间的三个参照点位。
[0071]
图4示出本发明一实施例的智能道钉初始闪亮长度示意图。
[0072]
图5示出本发明一实施例的自动驾驶车辆行驶于专用车道,智能道钉动态闪亮范围的状态示意图。
具体实施方式
[0073]
实施例
[0074]
如图1所示,基于高速公路的动态自动驾驶专用车道,专用车道与普通车道之间设有若干智能道钉进行间隔;
[0075]
设有专用车道的高速公路对应专用车道的位置设有若干雷视一体机;若干雷视一体机的检测范围覆盖专用车道,用于跟踪自动驾驶车辆在专用车道行驶的位置,并检测自动驾驶车辆是否进入专用车道,并对行驶于所述专用车道中所述智能道钉闪亮范围的所述社会车辆进行抓拍;
[0076]
高速公路设有专用车道的路段的入口匝道和出口匝道均设有自动驾驶车辆检测器;
[0077]
高速公路上,位于每一入口匝道汇入点的所对应所述专用车道的临近指定位置均设有可变信息标志;
[0078]
当每一对相邻的入口匝道和出口匝道之间没有自动驾驶车辆时,相应的可变信息标志以及相应的若干智能道钉均处于关闭状态,专用车道用于通行社会车辆;
[0079]
当自动驾驶车辆驶入入口匝道之后,与入口匝道对应的若干道钉以初始闪亮方式闪光,可变信息标志发出专用车道仅能通行自动驾驶车辆的声音和/或光学提示,用于提醒行驶于专用车道的所有社会车辆离开专用车道,以及提醒相邻车道的社会车辆禁止驶入专用车道的道钉闪亮范围;
[0080]
当自动驾驶车辆驶入专用车道,位于自动驾驶车辆前方的清空距离和自动驾驶车辆后方的安全距离内的若干道钉以运行闪亮方式闪光,并随着自动驾驶车辆移动,用于提醒相邻车道社会车辆禁止驶入专用车道的道钉闪亮范围。
[0081]
本发明的原理如下:
[0082]
本发明实现技术效果的途径主要是通过智能道钉闪亮范围的动态调整、可变信息标志的布设及控制、清空距离以及安全距离的空间保障来保证自动驾驶车辆的安全、快速通行。
[0083]
专用车道是动态自动驾驶专用道,即当没有自动驾驶车行驶时,自动驾驶专用道对社会车辆开放,社会车辆可以在自动驾驶专用道上行驶;当自动驾驶车辆即将到来时,自动驾驶车辆前后方路段一定距离内禁止社会车辆行驶。
[0084]
专用车道根据自动驾驶车辆进出路网的实时状态变化,通过实时检测手段、可变信息标志信息变化显示及若干智能道钉的动态闪亮,动态调整专用车道上社会车辆的使用路权,使得没有自动驾驶车行驶时,自动驾驶专用道对社会车辆开放;
[0085]
自动驾驶车辆在专用道上行驶时,其前后方路段一定距离内没有社会车辆存在,从而既保证自动驾驶车辆的安全,提高其通行效率,也提升专用道的使用效率,减少社会车辆的延误。
[0086]
高速公路上匝道入口处检测到自动驾驶车辆开始驶入,可变信息标志发出仅能通行所述自动驾驶车辆的声音和/或光学提示,如显示“x”(即专用道禁止社会车辆驶入),触发社会车辆驶入抓拍,智能道钉启亮,闪亮范围为初始闪亮长度,提示智能道钉闪亮范围内社会车辆立即驶离。假设在可变信息标志变化前进入专用道的最后一辆社会车辆为c,此时最后一辆社会车辆c正常情况应驶离专用道,自动驾驶车辆a进入高速路网,逐渐通过换道汇入专用道,但需考虑临界情况,即由于相邻车辆社会车辆的交织,最后一辆社会车辆c无法尽快驶离专用道,因此需要通过可变信息标志的布设位置规避这一情况,从而确保自动
驾驶车辆的运行安全。
[0087]
在自动驾驶车辆汇入专用车道时,可变信息标志开始变化,显示专用车道可以为社会车辆使用,所有智能道钉均以运行闪亮方式闪光,闪亮范围随着所述自动驾驶车辆行驶位置的变化而动态变化,所有雷视一体机均抓拍进入所述智能道钉闪亮范围内的所述社会车辆。
[0088]
如图3所示,在某些实施例中,可变信息标志布设在合理区间内,合理区间的计算公式如下,以下公式以专用车道的行车方向为x轴正方向,下述点位位置大小比较参照位于x轴的位置,沿x轴正方向,依次设3号位置x
3
、1号位置x
1
、2号位置x
2
:
[0089][0090][0091]
s
v
=s
a
∪s
b
;
[0092]
其中,c为高速公路上匝道入口处检测到自动驾驶车辆a开始驶入后,经过可变信息标志位置进入专用道的最后一辆社会车辆;
[0093]
所述a为从匝道驶入,进入到高速路网中的自动驾驶车辆;
[0094]
s
a
为可变信息标志布设的可选点位a,且x
1
≤s
a
≤x
2
;
[0095]
s
b
为可变信息标志布设的可选点位b,且s
b
≤x
3
;
[0096]
s
v
为可变信息标志布设的可选位置;
[0097]
l
c
为自动驾驶车辆与前方社会车辆的清空距离,单位m;
[0098]
l
s
为自动驾驶车辆与后方社会车辆的安全距离,单位m;
[0099]
t为自动驾驶车辆从入口匝道检测器位置到汇入自动驾驶专用道的行驶时间,单位s;
[0100]
minv
c
为社会车辆的最小行驶速度,单位m/s;
[0101]
maxv
c
为社会车辆的最大行驶速度,单位m/s;
[0102]
为自动驾驶车辆以最大速度汇入至自动驾驶车道后,位于自动驾驶专用车道的位置;
[0103]
为自动驾驶车辆以最小速度汇入至自动驾驶车道后,位于自动驾驶专用车道的位置。
[0104]
如图4所示,在某些实施例中,初始闪亮方式闪光的若干智能道钉的长度的计算公式如下:
[0105][0106]
其中,为所述自动驾驶车辆以最大速度汇入至所述自动驾驶车道后,位于所述自动驾驶专用车道的位置;
[0107]
s
v
为可变信息标志布设的可选位置;
[0108]
l
c
为所述自动驾驶车辆与前方社会车辆的清空距离,单位m。
[0109]
如图5所示,在某些实施例中,运行闪亮方式闪光的若干智能道钉的范围为自动驾驶车辆所在区域及满足安全距离和清空距离的区域之和,计算方法如下:
[0110]
将所述专用车道按总长度等距分段,每段长度为50m至100m,所述运行闪亮方式闪
光的若干所述智能道钉的范围=所述自动驾驶车辆行驶位置所在的所述分段+清空距离所处的所述分段+安全距离所处的所述分段,所述清空距离l
c
的计算公式如下:
[0111][0112]
其中,为所述行驶于自动驾驶专用道上的所述自动驾驶车辆在反应时间内最大行驶距离,单位m;
[0113]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆发现前车骤停所需最大安全制动距离,单位m;
[0114]
为所述前方车辆在反应时间内最大行驶距离,单位m;
[0115]
为所述前车发现后方来车时换道所需最大距离,单位m;
[0116]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的反应时间,单位s;
[0117]
maxv
a
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最大车速,单位km/h;
[0118]
为所述行驶于自动驾驶专用道上的所述自动驾驶车辆的最小制动加速度m/s
2
;
[0119]
为所述前车的最大反应时间,单位s;
[0120]
maxv
f
为所述前车的最大车速,单位km/h;
[0121]
为所述前车换道横向最大偏移距离,单位m。
[0122]
在某些实施例中,所述安全距离l
s
的计算公式如下:
[0123][0124][0125][0126][0127]
其中,为所述后方车辆在反应时间内最大行驶距离,单位为m;
[0128]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆时,换道所需最大距离,单位为m;
[0129]
为所述后方车辆发现所述行驶于自动驾驶专用道上的所述自动驾驶车辆骤停时,所需的最大安全制动距离,单位为m;
[0130]
为所述后车的最大反应时间,单位为s;
[0131]
maxv
r
为所述后车的最大车速,单位为km/h;
[0132]
为所述后车换道横向最大偏移距离,单位为m;
[0133]
为所述后车的最小制动加速度m/s
2
。
[0134]
如图2所示,本发明还提供基于高速公路的动态自动驾驶专用车道的使用方法,步骤如下:
[0135]
在自动驾驶车辆未驶入入口匝道,或者专用车道没有自动驾驶车辆行驶时,可变信息标志和所有智能道钉均处于关闭状态,所有雷视一体机均不进行抓拍,专用车道用于通行社会车辆;
[0136]
在自动驾驶车辆已驶入入口匝道,但并未驶入专用车道时,可变信息标志显示专用车道为自动驾驶车辆专用,提醒后方车辆不得驶入自动驾驶车辆专用车道,所有智能道钉均以初始闪亮方式闪光,请行驶于专用车道智能道钉闪亮范围内的所有社会车辆离开专用车道;所有雷视一体机开始抓拍进入专用车道的社会车辆以及10s内不离开自动驾驶专用车道的社会车辆;
[0137]
在自动驾驶车辆汇入专用车道时,可变信息标志开始变化,显示专用车道可以为社会车辆使用,所有智能道钉均以运行闪亮方式闪光,闪亮范围随着自动驾驶车辆行驶位置的变化而动态变化,所有雷视一体机均抓拍进入智能道钉闪亮范围内的社会车辆;
[0138]
当多辆自动驾驶车辆同时对专用车道触发请求时,专用车道按照并的逻辑响应;
[0139]
在自动驾驶车辆驶出出口匝道时,且专用车道范围内没有其他自动驾驶车辆行驶时,所有智能道钉均关闭,所有雷视一体机均不进行抓拍,专用车道用于通行社会车辆。
[0140]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1