多级报警的低功耗开盖报警器及控制方法与流程
[0001]
本发明涉及智能井盖领域,尤其涉及一种多级报警的低功耗开盖报警器及控制方法。
背景技术:
[0002]
井盖,是大街小巷都可见的道路设施,数量可谓及其的庞大,从而引发关注,因井盖损坏,维护人员未能及时修理,造成人员伤亡的案例比比皆是,从而引申出对井盖进行监测的技术。而现有技术的开盖报警器,通过角度相关的传感器模块能够识别出井盖的关闭与开启,一定程度上能够起到对井盖的监测。同时通过nb-iot物联网技术等通信网络方式将设备状态上送给服务端,通知后端维护人员井盖的相关信息。物联网技术的特点是覆盖广,大连接,深覆盖,低功耗的特点。
[0003]
现有的开盖报警器,通过角度相关的传感器,能够做到对井盖开盖与关盖进行检测,但是没有能够精准的检测出井盖的开盖角度,如井盖完全打开,小角度开盖排水等,并不能明确表明井盖所处的状态,容易增加维护人员的维护难度,造成资源浪费,更严重的是不可预知的安全性问题。同时现有的开盖报警器,因外包装采用封闭性设计,防水防潮,很难再次进行电池的更换,设备生产组装后就已上电运行,在库存下设备就会造成大量的耗电,从而影响设备安装后的续航。
技术实现要素:
[0004]
为了克服现有技术当中存在的缺陷和不足,本发明提出了一种新型的多级报警的低功耗开盖报警器及控制方法,其主要解决了井盖开盖角度精准识别,电池续航问题。其要点在于使用霍尔传感器用于激活设备和作为外部事件触发开关,并由此实现了低功耗的装置设计方案;采用三轴传感器提供了精确的角度监测功能。
[0005]
基于装置方案,还进一步能够实现自动校准的操作,同时提供了报警识别方案,能够实现多级报警。
[0006]
其具体采用以下技术方案:一种多级报警的低功耗开盖报警器,其特征在于,包括:mcu控制模块,以及分别与所述mcu控制模块连接的霍尔传感器、三轴传感器、通信模组以及电池模块;所述霍尔传感器作为外部事件触发开关;所述三轴传感器用于检测角度,并对mcu控制模块提供唤醒信号。
[0007]
优选地,所述mcu控制模块采用st意法半导体的stm32l071xxx;所述电池模块采用锂-亚硫酰氯卷绕式电池er26500m;所述霍尔传感器采用tmr1302;所述三轴传感器采用lis2dh12;所述通信模组采用移远nb-iot模组。
[0008]
优选地,固定在井盖背面,且井盖所在路面的倾斜角度小于30
°
。
[0009]
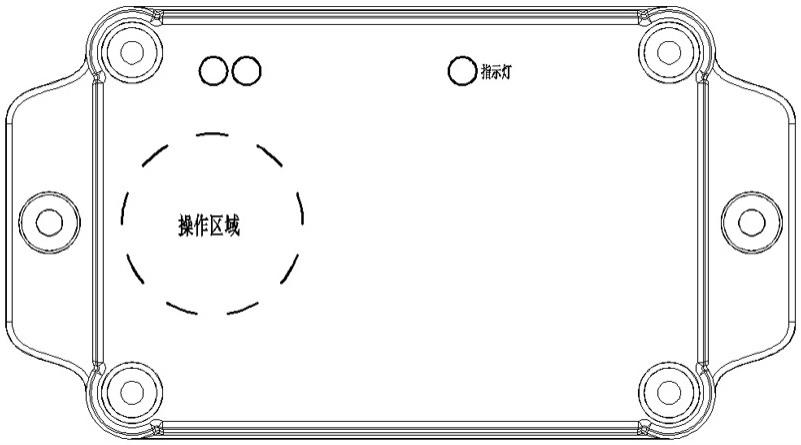
优选地,所述霍尔传感器在开盖报警器的壳体上投影有操作区域,所述操作区域用于与磁铁配合使用触发霍尔传感器。
[0010]
以及根据以上多级报警的低功耗开盖报警器的控制方法,其特征在于,包括以下
步骤:步骤s1:将开盖报警器固定安装在井盖背面;步骤s2:采用磁体将处于未激活的超低功耗状态的开盖报警器激活至出厂状态,开启角度识别和数据通信的功能;并将井盖安放回原位;步骤s3:采用磁体触发开盖报警器的校准操作,并设置三轴传感器脉冲信号重力加速度参数,使三轴传感器在出现角度变化时能够产生唤醒信号;步骤s4:当mcu接收到唤醒信号时,被动唤醒并读取三轴传感器数据;步骤s5:mcu对三轴传感器数据进行处理后转化为偏差角度并判断是否达到报警角度阈值,如未达到,则返回步骤s14,若达到,则执行步骤s4;步骤s6:mcu通过通信模组向远程终端传输告警信息。
[0011]
优选地,在步骤s3中,所述校准操作具体包括以下步骤:步骤s31:通过磁体靠近霍尔传感器超过预设的时间的操作触发启动校准操作;步骤s32:mcu通过三轴传感器获取启动时刻的xyz轴的分量;步骤s33:校准过程中,三轴传感器继续采集xyz轴的分量,mcu与步骤s32采集的分量数据,使用向量点乘算法,计算出z轴与重力加速度的夹角;此时识别到角度与启动校准时夹角达到设置角度时,停止采集,否则继续执行步骤s33直至校准时间结束;步骤s34:校准时间结束后,继续采集xyz轴的分量,使用点乘算法计算与校准过程中获取的夹角是否达到设置角度,若满足设置角度,将使用步骤s33的向量作为校准起始位置,若达不到设置角度,将使用步骤s32中的向量作为校准起始位置;步骤s35:使用校准起始位置的向量和结束时的向量,使用叉乘算法,计算出上翻轴向信息,同时记录静置角度的信息;在步骤s5中,通过与上翻轴向的方向的偏差角度,是否达到报警角度阈值。
[0012]
优选地,当校准异常时,所述远程终端向mcu发出校准指令,mcu通过三轴传感器采集当前xyz轴的分量,该分量与外部触发校准开始时记录的xyz轴的分量,使用叉乘算法,计算出上翻轴向信息,同时记录静置角度的信息完成校准。
[0013]
优选地,在步骤s5中,采用中断和轮循结合的方式实现报警角度阈值的判断;所述报警角度阈值分为三种开启状态:其中,0
°
~第一报警角度阈值为无报警、第一报警角度阈值~第二报警角度阈值为一级报警、大于第二报警角度阈值为二级报警,所述第一报警角度阈值和第二报警角度阈值为可配置参数。
[0014]
优选地,mcu的型号为stm32系列;步骤s5具体包括以下步骤:步骤s51:当三轴传感器中断触发唤醒mcu后,关闭中断,采用轮循方式,设置每10ms采集一次,使用内嵌fifo的stream模式,每组取32个数据,去除头尾各5个数据,计算出平均角度,做为当前开启角度;步骤s52:根据步骤s51得出的开启角度设定当前井盖处于无报警状态或一级报警状态或二级报警状态:若处于无报警状态,则:清除一级报警和二级报警标识;若处于一级报警,则清除无报警、二级报警标识;若处于二级报警,则只清除无报警标识;并对各状态分别记录识别到的起始时刻;步骤s53:重复步骤s52,直到当状态处于一种模式超过5秒,即认为已稳定;若处于无报警状态且角度小于第一报警角度阈值,则认为处于关盖状态,设置成
±
第一报警角度阈值
两个中断阀值;若处于无报警但角度处于第一报警角度阈值<β<第二报警角度阈值,设置成一级报警中断阀值;若处于一级报警,则设置二级报警中断阀值;若处于二级报警,则设置一级报警中断阀值,开启中断功能。
[0015]
优选地,若当前处于二级报警或无报警状态,则无需轮循,等待中断即可;若当前处于一级报警状态,则采用每30秒轮循fifo的stream模式数据辅助判断是否关闭,采用中断判断是否进入二级报警。
[0016]
本发明及其优选方案能够实现设备在库存态运行于低功耗,并与安装部署时通过霍尔传感器非接触式地进行激活设备,让设备可进行通信处理。在一定程度上起到节省功耗的目的。
[0017]
其能够实现多级报警,更能够体现当前井盖的状态,使用三轴传感器(加速器)的特性,经过精密的报警判断算法,得以对开盖角度进行精准的判断,实现多级报警的识别,能够判断井盖目前是全开或是开盖排水等状态。
[0018]
其能够实现设备的自动校准操作,通过与服务器平台端或其他远程终端的配合,能够对异常设备进行纠正,使得设备始终能够获取正确的开盖角度。
附图说明
[0019]
下面结合附图和具体实施方式对本发明进一步详细的说明:图1是本发明实施例整体结构示意图;图2是本发明实施例操作区域位置示意图;图3是本发明实施例外型立体示意图;图4是本发明实施例电路原理示意图1;图5是本发明实施例电路原理示意图2;图6是本发明实施例电路原理示意图3。
具体实施方式
[0020]
为让本专利的特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下:如图1所示,本实施例装置主要包括:cu控制模块,以及分别与mcu控制模块连接的霍尔传感器、三轴传感器、通信模组以及电池模块;霍尔传感器作为外部事件触发开关;三轴传感器用于检测角度,并对mcu控制模块提供唤醒信号。
[0021]
本实施例中使用的mcu控制模块,为st意法半导体的stm32l071xxx,该芯片是一款基于arm cortex m0+ 高性能,超低功耗的微控制器,具有128kb flash,6kb的内部eeprom,adc等丰富的外设,完全可满足本实施例的需求,对外围各个模块进行控制管理。同时超低功耗的特性,符合低功耗装置的需求。
[0022]
本实施例中使用的电池模块,为锂-亚硫酰氯卷绕式电池er26500m,该电池具备6ah容量,-60度到85度的宽广温度范围,1000ma的最大持续放电电流,2000ma最大脉冲能力,低于3%的自放电率,优秀的性能可支撑通信模组的功率要求,同时6ah的高容量,可保障设备多年运行的续航要求。
[0023]
本实施例中使用的霍尔传感器,为传感器tmr1302,这是是一款集成了隧道磁阻
(tmr)传感器和cmos技术,为高灵敏度、高速、低功耗、高精度应用而开发的全极磁开关,其以低工作电压,微安级的供电电流,高响应频率,宽的工作温度范围成为低功耗,高性能应用的理想选择。其超低低功耗,符合本实施例所需的低功耗的要求,同时该传感器作为外部事件触发开关,与mcu采用中断的通信方式,当受到外部磁场的触发时,产生唤醒mcu中断信号,控制着设备状态的切换,校准处理等事件处理。如图2所示,霍尔传感器在开盖报警器的壳体上投影有操作区域,操作区域用于与磁铁配合使用触发霍尔传感器。
[0024]
本实施例中使用的三轴加速器(传感器),为lis2dh12,该传感器是一款超低功耗高性能的三轴加速器,能够测量加速度的输出数据率从1赫兹到5.3千赫,同时可以配置为产生中断信号由2个独立的惯性唤醒/自由坠落事件。其超低功耗的性能符合本实施例的要求,同时能够以中断信号唤醒设备,为降低设备整体功耗提供了条件。本传感器与mcu中断io口相连接,设置一定的唤醒角度,当触发唤醒角度时,提供唤醒脉冲,使得mcu唤醒,同时使得传感器与mcu通过i2c接口进行通信,读取模块中fifo数据进行数据判断处理。
[0025]
本实施例中使用的通信模组,为移远nb-iot模组。该模组是基于蜂窝网络的窄带物联网技术标准的nb-iot模组,支持海量连接、有深度覆盖能力、超低功耗,低成本,稳定可靠的优点。尤其是超低功耗的特性,引入了超长drx(非连续接收)省电技术和psm省电态模式可供选择。超低功耗的特性,符合本实施例的要求。本实施例mcu与通信模组通过串口进行通信,进行数据的发送与接收,数据处理结束,可使通信模组快速进入psm省电态。
[0026]
如图4-图6所示,本实施例提供了基于以上电子元件的构成本实施例装置方案的电路原理图。
[0027]
如图3所示,本发明提供的以上电路元件安装在一个壳体之内,用于整体固定在井盖背面,且井盖所在路面的倾斜角度小于30
°
。其安装有以下注意事项:安装前须对井盖上的安装区域和挂架清洁,安装区域平整且无影响黏贴牢固性的锈迹等。
[0028]
需按照在nb-iot网络覆盖良好的地方,避免因网络差,导致连接失败造成设备无法正常使用。
[0029]
支持螺丝固定、焊接、胶水黏贴等固定方式,可以根据井盖的材质及类型选择适当固定方式。
[0030]
在安装时,用m4*8圆头螺丝将设备锁在挂架上。先用钢丝轮将井盖背面固定设备的区域尽可能打磨光滑,确保表面清洁无脏污、锈迹。在挂架上涂抹胶水,注意胶水不能沾在设备及螺丝孔上,否则后续无法将设备取出。将设备粘到磨好的井盖区域上,并在挂架四周用强力胶加固。最后将3000高斯磁铁(最好采用永磁体)放置在设备操作区域持续5秒以上,直至指示灯亮起,指示灯亮起后即可拿走磁铁,关闭井盖。
[0031]
关于安装位置选择:将设备安装在井盖背面中心区域,若中心区域被占用,则尽可能靠近中心区域来安装。
[0032]
通过以下的流程说明,让本本实施例控制方法的细节更加的清晰明了,主要的流程如下:1)设备生产未安装部署时,处于库存态,各个模块处于低功耗状态,所以此时设备未安装时处于超低功耗状态,当开盖报警器将要安装部署时,使用磁体对霍尔传感器进行多次强磁激活报警器,即当mcu接收到霍尔传感器脉冲信号时,将触发设备激活到出厂态,出厂
态即可进行角度识别与数据通信等;2)报警器安装时,通过使用磁体对霍尔传感器进行长强磁触发设备进行校准操作,通过校准的操作,使得报警器能够正确读取三轴加速器相关的参数,并进行角度的计算,同时设置三轴加速器脉冲信号重力加速度参数,使得三轴加速器在出现角度变化时能够产生秒冲信号唤醒设备;3)当mcu接收到报警脉冲信号时,被动唤醒;4)mcu读取三轴加速器传感器数据;5)对读取的传感器的各个数据进行数据转化为角度,通过报警机制算法对角度进行判断,若经过报警角度识别,触发一级报警角度阈值或者触发二级报警角度阈值时,将执行步骤6),否则返回步骤3)继续执行;6)mcu通过nb通信模组,向远程服务端平台上送一级或者二级报警信息;7)远程服务端平台可操控上线的开盖报警器,当发现设备校准异常时,可通过平台下发重新校准命令,纠正校准时出现的异常。
[0033]
上述描述的校准操作原理说明如下:(1)通过外部磁体进行霍尔长时间操作触发启动校准操作;(2)mcu通过三轴传感器获取启动时刻的xyz轴的分量;(3)校准过程中,三轴传感器继续采集xyz轴的分量,与(2)中的分量,使用向量点乘算法,算出z+轴与重力加速度的夹角,此时识别到角度与启动校准时夹角达到设置角度时,停止采集,否则继续执行(3);(4)校准时间到,继续采集xyz轴的分量,使用点乘算法计算与校准过程中获取的夹角是否达到设置角度,若满足设置角度,将使用(3)的向量作为校准起始位置,若达不到设置角度,将使用(2)中的向量做起始位置;(5)使用校准起始位置的向量和结束时的向量,使用叉乘算法,计算出上翻轴向信息,同时记录静置角度等信息。后续的开关盖操作均可以通过与该轴向的方向相同与不同,来判断开盖还是关盖。
[0034]
上述平台校准操作原理说明如下:(1)服务端平台收到校准异常的信息,进行配置重新校准命令,待下次通信时可生效;(2)开盖报警器收到重新校准命令,开启重新校准;(3)mcu通过三轴加速器采集当前xyz轴的分量,该分量与外部触发校准开始时记录的xyz轴的分量,使用叉乘算法,计算出上翻轴向信息,同时记录静置角度等信息完成校准。
[0035]
上述报警识别的原理说明如下:在校准完成后的基础上,采用中断和轮循结合的方式来进行实现。根据是否上报报警信息,分成三种开启状态,分别为:无报警(0
°
~15
°
)、一级报警(15
°
~60
°
)和二级报警(>60
°
),当前限定的15
°
,60
°
为可配置参数。
[0036]
(1)当三轴加速器中断触发唤醒mcu后,关闭中断,采用轮循方式,设置每10ms采集一次,使用内嵌fifo的stream模式,每组取32个数据,去除头尾各5次,算出平均角度,做为当前开启角度。
[0037]
(2)根据上一步得出的开启角度设定当前井盖处于无报警状态还是一级报警还是二级报警状态。若处于无报警状态,则需清除一级报警和二级报警标识;若处于一级报警,
则需清除无报警、二级报警标识;若处于二级报警,则只清除无报警标识。各状态还需分别记录识到到的起始时刻。
[0038]
(3)重复步骤(2),直到当状态处于一种模式超过5秒时,即认为已稳定。若处于无报警状态且角度小于15
°
,则认为处于关盖状态,设置成
±
15
°
两个中断阀值;若处于无报警但角度处于15
°
<β<60
°
,设置成一级报警中断阀值;若处于一级报警,则设置二级报警中断阀值;若处于二级报警,则设置一级报警中断阀值,开启中断功能。
[0039]
若当前处于二级报警或无报警状态,则无需轮循,等待中断即可。若当前处于一级报警状态,则采用每30秒轮循fifo的stream模式数据辅助判断是否关闭,采用中断判断是否进入二级报警。
[0040]
本专利不局限于上述最佳实施方式,任何人在本专利的启示下都可以得出其它各种形式的多级报警的低功耗开盖报警器及控制方法,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本专利的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1