车辆自动并线驶入方法与流程
1.本发明涉及一种将车辆从驶入匝道自动并线驶入车道的方法。
背景技术:
2.de 10 2018 007 293 a1公开一种用于操作自主驾驶行驶车辆的方法。在此,对于车道并线驶入过程和对于车辆变道过程分别规定小于预先设定的目标时隙的最小时隙和驰豫时间。当未低于最小时隙时,并且预测出距本车前行车辆的距离在针对并线驶入过程或变道过程预先设定的驰豫时间内被增大至目标时隙时,执行并线过程和变道过程。另外,de 10 2018 007 293 a1公开一种用于机动车从当前车道变道至相邻目标车道的操控辅助方法,尤其用于并线驶入相邻车道。在这种情况下,相邻目标车道的前后方区域都针对期望的变道被监控、在那里所测得的车辆的距离及其速度被测量并由此计算出安全距离。如果所有的测量距离都大于计算的安全距离,则这被识别为可以变道。
技术实现要素:
3.本发明基于的任务是指出一种与现有技术相比改进的用于将车辆从驶入匝道自动并线驶入车道的方法。
4.根据本发明,该任务通过一种具有权利要求1所述特征的方法来完成。
5.本发明的有利设计是从属权利要求的主题。
6.在用于将车辆从驶入匝道自动并线驶入车道的方法中,即,在用于自动从驶入匝道变换至车道的方法中,根据本发明,预先确定主并线驶入位置,即,在先确定当待并入的车道空闲时车辆应在何处变道。如果变道不会导致对位于车道上的交通参与者的任何妨碍,则在主并线驶入位置处执行变道。否则,即,如果变道会导致位于车道上的交通参与者被妨碍,则在副并线驶入位置处进行变道,副并线驶入位置根据位于车道中的交通参与者之间的测定的空隙来确定。例如,如果交通参与者为了避免碰撞而必须避让或者如果其不得不明显地延迟其行程、即其减速超过规定值,则可以假定交通参与者受到妨碍。
7.该方法允许自动化的、特别是高度自动化或自主驾驶的车辆从一个驶入匝道舒适并线驶入一条车道,例如在州际路、快速路或高速路的驶入口处。此外,该方法允许针对自动化车辆在操控车辆时模仿人类行为并且像人类驾驶员通常会做的那样针对自动驾驶车辆限定在流畅交通中的任何驶入口处的并线驶入过程。
8.在该方法的一个可能设计中,基于交通观察数据来确定主并线驶入位置。由此能以可靠方式执行并线过程,在此,采用在道路交通中通常所用的并线驶入位置。
9.在该方法的另一个可能设计中,在交通观察范围内作为交通观察数据来查明其它交通参与者所观察到的并线驶入位置,并且依据其它交通参与者所观察到的并线驶入位置的频率分析确定主并线驶入位置。这允许很可靠地确定在各自驶入匝道上在道路交通中所常用的并线驶入位置并使主并线驶入位置与在各自驶入匝道中通常由交通参与者所采用的并线驶入位置相符。
10.在该方法的另一可能设计中,交通观察借助至少一个摄像头进行,该摄像头至少部分鸟瞰检测所述驶入匝道和车道。摄像头在此能够以位置固定的方式安置在驶入匝道和/或车道区域内。替代地或附加地,借助安置于无人飞行器(也称无人机)上的至少一个摄像头进行交通观察。从鸟瞰角度检测所述驶入匝道和车道能够实现大范围的交通观察和对在驶入匝道上行驶的车辆的并线驶入位置的可靠检测。
11.在该方法的另一个可能设计中,交通观察依据在驶经驶入匝道和/或车道时由其它交通参与者获取的环境数据和/或交通参与者自身数据来进行。由此也可以进行大范围交通观察和对驶经驶入匝道的车辆的并线驶入位置的可靠检测。
12.在该方法的另一个可能设计中,所述环境数据和/或交通参与者自身数据被传输到车外的中央计算单元,该中央计算单元从中确定主并线驶入位置。这一方面能够使车辆内的所需的存储容量和计算能力最小化,另一方面能够将所传输数据的提供给其它交通参与者或供大量交通参与者使用。
13.在该方法的另一个可能设计中,交通参与者自身数据包括相应交通参与者的各自的并线驶入位置,因此能简单确定主并线驶入位置。
14.在该方法的另一可能设计中,仅人工控制的车辆的并线驶入位置被用来依据交通参与者的并线驶入位置确定主并线驶入位置。因此,随着越来越好的数据收集、例如车辆的典型并线驶入位置的确定,如此更舒适且更好地安排自动驾驶的车辆的并线,即,使其与普通驾驶员的典型并线驶入过程相符。这也可能发生于在流畅交通中在车道上行驶的车辆之间的时隙和并线驶入可能方式有很多种时。人工控制车辆与自动控制车辆之间的区别例如可以通过如下灯光信号的评估来实现,所述灯光信号由自动驾驶车辆发出以便将自动驾驶通知其它交通参与者。
15.在该方法的另一个可能设计中,主并线驶入位置被作为灵活的位置范围来设定。就是说,给自动驾驶车辆推荐一个更灵活的并线驶入范围,例如至少有70%的真实驾驶员已完成并线驶入的路段,或者例如不推荐在驶入匝道首尾处的、在所有司机中有不到15%的司机进行了并线驶入的路段内并线驶入。在交通量增大的情况下,该灵活范围也可被用作舒适并线过程的目标区间(zielkorridor)。
16.在该方法的另一个可能设计中,在确定主并线驶入位置时考虑由位于车辆中的乘车人给出的涉及并线时的舒适度的反馈。因此,在确定主并线驶入位置时可以采用在已执行的自动并线过程中乘车人的感受来优化并线驶入位置的选择。
17.以下将结合图来更详细解释本发明的实施例。
附图说明
18.附图示出:
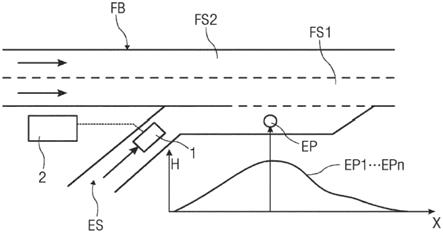
19.图1示意性示出行驶道路的俯视图和在行驶道路的不同位置处的并线过程的频率分布。
具体实施方式
20.在唯一的图1中示出了行驶道路fb的俯视图和不同并线过程的并线驶入位置ep1-epn的频率分布。在此,频率分布示出在行驶道路fb的不同位置x处的不同并线过程的各自
频率h。
21.行驶道路fb是多车道道路的组成部分并且包括具有相同行驶方向的两条车道fs1、fs2和一条驶入匝道es(也称为加速道或加速带)。想要并线驶入车道fs1的车辆1位于驶入匝道es上。
22.在车辆1的自动化且特别是高度自动化或自主运行中重要的是车辆1在正确的并线驶入位置ep处从驶入匝道es变至车道fs1。在并线过程中既不应存在对车辆1及其乘客的危险,也不应存在对其它交通参与者的危险。此外,并线过程应该如此进行,即,在此期间得到对车辆1的乘客的最大可能的舒适度。
23.为了实现所述目标,车辆1被设计用于自动驾驶,此时车辆可以在确定位置处执行可靠的并线和/或超车过程。此外,车辆1被设计成在数据技术方面连接到车外的、特别是中央的计算单元2,例如所谓的后端服务器。
24.为了实现将自动驾驶车辆1的并线驶入或插入安排得更舒适并仿效正常驾驶员的典型并线驶入,在此规定,作为在驶入匝道es上的各自驶入口的应该优选在此进行变道的主并线驶入位置ep,自主车辆1采用非自动化驾驶车辆的并线驶入位置ep1-epn的中值,所述非自动化驾驶车辆在相应基础设施中在时间上更早从驶入匝道es并线驶入车道fs1。主并线驶入位置ep与由真实驾驶员执行的具有平均特性的典型并线过程相符。在此,当在车辆环境内没有其它交通参与者、尤其是未被详细示出的其它车辆影响并线过程时,通过自动驾驶的车辆1力求且遵守在主并线驶入位置ep的变道。作为形成中值的替代方案,主并线驶入位置ep也可被设定为并线驶入位置ep1-epn的平均值。
25.换句话说:给自动驾驶车辆1设定一个作为主并线驶入位置ep的如下位置,在该位置,车辆1应从驶入匝道es变到车道fs1。该主并线驶入位置ep于是在车辆1的自动驾驶操作期间在如下情况下被用作变道目标位置,即,在变道时避免妨碍到位于车道fs1中的交通参与者。如果交通参与者在车辆1在其前方变道并入时不必或至多略微减速来对该车辆1作出反应,则是这种情况。
26.驶入口的并线驶入位置ep1至epn的中值依据空中观察来确定,空中观察提供了与图1所示的图示对应的图像。即,通过在对其它交通参与者的所观察到的并线驶入位置ep1-epn的频率分析中确定其中值并将该中值用作预先规定的并线驶入位置ep,来依据交通观察的数据确定主并线驶入位置ep。
27.为此,例如借助至少一个摄像头进行交通观察,摄像头至少部分鸟瞰检测驶入匝道es和至少相邻的车道fs1。摄像头在此能位置固定地布置在驶入匝道es和/或车道fs1的区域内。替代地或附加地,通过布置在无人飞行器(也称为无人机)上的至少一个摄像头进行交通观察。
28.替代地或附加地还可能的是,依据借助其它交通参与者在驶经驶入匝道es和/或其中一条车道fs1、fs2时所获取的环境数据和/或交通参与者自身数据进行交通观察。环境数据和/或交通参与者自身数据尤其借助所谓的v2x通信(v2x:车辆对外界)被传输到车外的中央计算单元2,它从中确定主并线驶入位置ep。在此情况下,交通参与者自身数据包括相应的交通参与者的各自的并线驶入位置ep1-epn。即,可通过实际测量从车队数据和/或无人机观察和/或用摄像头进行的观察中确定任何驶入口处的并线驶入位置ep1-epn的中值。
29.因此,任何驶入口的不同的与基础设施相关的并线驶入位置ep被存储在例如基于云的后端上并被传输到各不同车辆1。也可行的是不同的与基础设施相关的并线驶入位置ep1-epn出现在自动驾驶车辆1的数字地图中。
30.为了使主并线驶入位置ep仿效普通司机的典型并线驶入,在一个可能设计中仅使用未被示出的人工控制车辆的并线驶入位置ep1-epn来根据交通参与者的并线驶入位置ep1-epn确定主并线驶入位置ep。人工控制车辆和自动控制车辆之间的区分在此通过灯光信号的评估进行,该灯光信号由自动驾驶车辆发出以便将自动驾驶通知其它的交通参与者。
31.在另一个可能设计中,主并线驶入位置ep作为具有多个单独位置的灵活的位置范围来确定。即,向自动驾驶车辆1推荐一个更灵活的并线驶入范围,例如在所有真实驾驶员中至少70%完成并线驶入的路段。在此,例如可以排除不到15%的司机进行并线驶入的在驶入匝道es的首尾处的并线驶入路段。并线驶入推荐的更大的灵活范围也可适当地在交通流量增加时用作舒适并线驶入过程的目标区间。
32.为了优化主并线驶入位置ep的确定和选择,在一个可能设计中规定,在确定主并线驶入位置时考虑位于自动驾驶车辆1中的乘车人所给出的、涉及并线驶入时的舒适度的回馈、即反馈。
33.如果对于某个驶入匝道es不存在并线驶入位置ep1-epn的更精确测量,则可以假定初始并线驶入位置ep例如在各自驶入口、即驶入匝道es的中心。
34.也可能的是,针对自动驾驶车辆1所确定的主并线驶入位置ep位于驶入匝道es之外。这例如可能发生在例如数据基础不足的情况下,例如当并线驶入位置ep仅依据单个交通参与者的数据来确定,该单个交通参与者在驶入匝道es末尾后几米内晚些并线驶入。如果是这种情况,则自动驾驶车辆1忽略此不允许的并线驶入位置ep。
35.如所述地,当针对位于车道fs1中的交通参与者的妨碍得以避免时,在车辆1的自动驾驶操作期间使用主并线驶入位置ep。而如果在使用主并线驶入位置ep时存在使位于车道fs1中的交通参与者受到妨碍的危险,则根据所测得的在接连位于车道fs1上的交通参与者之间的自由空间来确定未被详细示出的副并线驶入位置,并在车辆1的自动驾驶操作期间将其用作变道目标位置。即,如果因车辆周围的交通流量不允许使用主并线驶入位置ep,则确定有足够的时隙来执行并线驶入过程。
36.例如所述确定如此进行,即,在车辆1在接连位于车道fs1上的交通参与者之间找到相应时隙、即相应的时间间隔的概率比较高的位置上,自动驾驶车辆1尝试并线驶入。这种时隙尤其取决于具有驶入匝道es的路段上的交通状况。例如,通过驶入口处的基础设施的传感器系统,即,尤其在驶入匝道es处的传感器系统,时隙分布可以与交通状况相关地被测量,其中,时隙分布被传输到中央计算机单元2,因此能够被自动驾驶车辆1调用。另一个可能实施方式规定,与交通状况相关的时隙分布可以由车队本身或基于车辆侧所设检测可行方式获取的信号来确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1