停车位的占用状态变化的识别的制作方法
1.本发明涉及用于车辆的停车位的占用状态变化的识别。在此,占用状态变化理解为停车位的占用状态(其值可以是空闲或占用)从空闲(或占用)状态变成占用(或空闲)状态。
背景技术:
2.de 10 2013 209 298 a1公开了一种用于车辆的用于识别潜在空出的停车位的移动系统以及一种用于识别潜在空出的停车位的方法。该系统基本上仅可以识别在系统的视野中潜在空出的停车位。
3.de 10 2015 010 548 a1描述了一种用于识别和显示停车位的空出的系统和方法。该系统或方法也仅可以识别在视野内空出的停车位。
4.wo 2017/084844 a1公开了停车位通过检测移动设备的操纵的移交,该移动设备的操纵表明车辆的驾驶员正前往停车位。然后可以经由服务器将该信息传输到搜索停车位的用户处。
5.先前提到的公开文献中描述的方法基本上评估处于搜索停车位的车辆视野中的信号,从而仅可以识别在该视野内空出的停车位。
6.此外,根据现有技术(例如上面提到的wo 2017/084844 a1),存在所谓的后端支持方式,在其中,以不同方式采集关于空闲的停车位的信息并且将其发送到服务器处。随后将在那里采集的数据发送到请求的客户处。然而,关于停车位的信息会迅速过时,因为在较大的市中心中空出的停车位在几分钟后就已再度被占用。因此,服务器中的数据可能在其到达客户或驾驶员之前已经过时,其中,甚至没有考虑前往停车位所需的路程。存在用于预定停车位的方法,但其用于停车楼,而不用于公共停车位。
技术实现要素:
7.因此,本发明提出以下任务:在不使用服务器的情况下,尽可能迅速地识别停车位的占用状态变化,即使在进行搜索的车辆的视野之外。
8.根据本发明,该任务通过根据权利要求1所述的用于识别停车位的占用状态变化的方法来解决。从属权利要求限定了本发明的优选且有利的实施方式。
9.在本发明的范围内,提供了一种用于识别停车位的占用状态变化的方法。在此,如果停车位刚刚被车辆空出或刚刚被车辆占用,则存在占用状态变化。根据本发明的方法包括以下步骤:
•ꢀ
在另外的车辆内检测无线电信号,所述无线电信号由车辆经由car-2-car通信或v2v通信发出。在此,这些无线电信号尤其是pwlan通信(its-g5)的一部分,利用该pwlan通信将所谓的标准化的消息(协同认知消息(cam))由车辆发送至另外的车辆。根据pwlan(its-g5),协同认知消息由车辆有规律地(以1hz至10hz的频率)发出。因为car-2-car通信或直接通信是欧盟授权法案c2c cc的一部分,在未来越来越多的车辆将发出协同认知消
息;
•ꢀ
在另外的车辆中评估从车辆接收到的这些无线电信号,以便根据该评估在另外的车辆内识别停车位是否刚刚被车辆空出或停车位是否刚刚被车辆占用。在该步骤中,尤其仅评估从车辆接收到的这些无线电信号,而不评估来自其他发送器的光学信号、超声波信号、雷达信号和无线电信号。虽然根据本发明在该步骤中也可以评估来自其他发送器的光学信号、超声波信号、雷达信号或无线电信号,但用于识别占用状态变化的评估的重点在于评估来自车辆的无线电信号。
10.因为经由car-2-car通信将无线电信号从车辆传递到另外的车辆处,因此有利地不需要服务器或后端,这加速了无线电信号的传送和最终评估结果的确定。通过利用车辆的无线电信号在另外的车辆内评估尤其标准化的消息,泊入或泊出的车辆有利地不必具有附加的硬件或软件。仅仅那些想要借助于根据本发明的方法来识别停车位的占用状态变化的车辆才需要相应的软件。因为car-2-car通信可以具有500m的有效范围,另外的车辆还检测来自处于该另外的车辆视野之外的车辆的无线电信号。总之,根据本发明的方法因此解决了上面提出的任务。
11.按照一优选的根据本发明的实施方式,由车辆发出的无线电信号包括一个或多个消息,所述消息本身包括从以下信息集合中选择的一个或多个信息要素:
•ꢀ
车辆的尺寸(例如高度、宽度和长度)。根据车辆的尺寸,可以推断出被车辆空出的停车位的尺寸;
•ꢀ
车辆的灯光信号,其包括车辆的闪光信号。例如,车辆的所设置的闪光指示灯可以是对泊入过程或泊出过程的指示;
•ꢀ
关于车辆的当前位置和车辆在过去的位置的信息。根据车辆的相应当前位置,可以生成车辆的轨迹,根据该轨迹的分析可以辨识车辆的泊入过程或泊出过程。根据车辆(在过去)的位置也可以确定停车位的位置。关于车辆的当前位置的信息可以具有大约200m的历史记录,从而可以近似随时地生成车辆的至少200m长的轨迹;
•ꢀ
车辆的速度。泊入过程和泊出过程典型地在速度较小的情况下进行(也就是说,速度低于速度阈值),从而可以根据车辆的速度推断出泊入过程或泊出过程;
•ꢀ
车辆的加速度。在泊入过程或泊出过程期间,加速度通常低于加速度阈值,使得车辆的加速度也是针对车辆的泊入过程或泊出过程的标志;
•ꢀ
车辆的当前挂入的挡位或档位变化。档位变化(尤其在前进挡位和倒车挡位之间)也可以用作针对泊入过程或泊出过程的标志;
•ꢀ
车辆的转向角。如果车辆的转向角在短时间内发生多次急剧变化(例如从完全左转到完全右转,或者反过来),这是针对车辆的泊入过程或泊出过程的有力标志;
•ꢀ
车辆的取向。车辆的取向也可以是针对泊入过程或泊出过程的标志。例如,如果在车辆的纵向轴线与停车位所处的道路的纵向方向之间的角度大于角度阈值,则这是针对车辆的泊入过程或泊出过程的标志。
12.尤其地,无线电信号在另外的车辆中的评估包括根据预设的分析算法来分析一个或多个信息要素。如先前在信息集合的要素的描述中已经阐明的那样,可以根据这些信息要素的分析来确定车辆处于泊入过程或泊出过程或者刚刚完成这样的过程的一种概率。根据本发明,分析算法可以根据以下信息要素中的一个或多个与参考或相应的阈值的比较来
识别调移(rangieren)或者泊入过程或泊出过程,如先前就已经针对各个信息要素描述的那样:
•ꢀ
车辆的速度;
•ꢀ
车辆的加速度;
•ꢀ
车辆的转向角;
•ꢀ
车辆的挡位或档位变化;
•ꢀ
车辆的位置随时间的变化;
•ꢀ
车辆的取向随时间的变化;
•ꢀ
车辆的灯光信号。
13.通过分析先前说明的信息要素,可以分别说明针对车辆泊入过程或泊出过程的标志或概率,由此可以通过将这些标志或概率相应累加来确定车辆的泊入过程或泊出过程的总概率。例如,如果该总概率超过总概率阈值,则根据本发明推定存在车辆的泊入过程或泊出过程。
14.在此,分析算法可以根据车辆的位置随时间的变化来确定该车辆的轨迹。例如,如果轨迹的形状基本上相应于预设的泊入轨迹或泊出轨迹,那么分析算法可以根据该轨迹推断出车辆的调移或者车辆的泊入过程或泊出过程。
15.此外,分析算法可以执行车辆的位置与显示停车位的地图数据的比较。通过车辆的当前位置信息与地图数据的这种比较,可以确定该车辆处于道路上或处于停车位上。
16.此外,根据本发明的方法可以包括:
•ꢀ
检测移动设备的描述该移动设备的运动的信息。在该步骤中,尤其经由移动设备或移动终端设备的加速度传感器来采集关于车辆的潜在驾驶员的当前运动的信息;
•ꢀ
评估移动设备的信息,以便通过该评估来识别是否发生停车位的占用状态变化。例如,如果在评估信息时识别出从行走(缓慢的速度并且附加地移动设备的计步器探测到步数)到行驶(更快的速度并且附加地计步器未探测到步数)的过渡,则可能存在泊出过程。类似地,如果在评估移动设备的信息时识别出从行驶到行走的过渡,则可能存在泊入过程。
17.与本发明的基本构思相比,先前描述的实施方式需要后端服务器,移动设备的信息或至少移动设备的信息的评估结果例如经移动无线电传送给该后端服务器。此外,相应的功能必须安装在移动设备上。
18.根据本发明,车辆的无线电信号的评估结果(例如,协同认知消息的评估结果)可以传递到服务器处。利用该变型方案,可以改善后端支持的方法。
19.附加地或备选地,无线电信号的评估结果也可以经由car-2-car通信传达到其他车辆处。然而,为此其他车辆必须能够评估相应的信息。
20.尤其地,端到端延迟(ende-zu-ende-latenz)不大于15秒。端到端延迟相应于从无线电信号的检测直至无线电信号的评估结束的时间间隔。这种较小的端到端延迟表现了与现有技术的显著差异,现有技术由于与后端服务器的通信而具有明显更长的端到端延迟。
21.应指出的是,尤其由车辆借助于无线电信号不输出如下消息,该消息明确地说明发生了停车位的占用状态变化。
22.因此,本发明尤其不同于如下方法,在该方法中,发起停车位的占用状态变化(即
空出停车位或占用停车位)的车辆将该信息明确地(大多经由服务器)传送到另外的车辆处。信息的明确传送在此理解为:停车位被空出或停车位被占用的信息大多连同停车位的位置的说明被明确地传送。与此相比,根据本发明,这样的信息不是由车辆明确地传送,而是另外的车辆必须根据该车辆的无线电信号的评估或分析来确定该信息。与协同认知消息相比,这种关于停车位的占用状态变化的明确信息不是标准化的。因此根据本发明,如果不传递该明确信息,本发明可以仅利用标准化的消息工作。这具有如下优点:仅仅搜索停车位的(即,另外的)车辆必须根据本发明进行设计,因为仅以发射无线电信号的车辆行为符合标准为前提。
23.此外,如果根据评估识别出车辆刚刚空出停车位,则有利地确定停车位的位置。在这种情况下,附加地可以自动确定从另外的车辆的当前位置到停车位的位置的路线。该变型方案具有如下优点:另外的车辆的驾驶员几乎仅须启动根据本发明的方法。然后根据本发明的方法搜索空出的停车位并且经导航设备将驾驶员自动导引至该停车位。
24.此外,根据本发明的方法附加地可以包括以下步骤:
•ꢀ
根据另外的(在此未进一步描述的)方法来检测关于空闲的停车位的信息;
•ꢀ
如果根据评估识别出空闲的停车位刚刚被车辆占用,则通知另外的车辆。
25.如果驾驶员经由利用后端服务器工作的服务商(如parkopedia)得到针对空闲停车位的推荐,则先前描述的实施方式尤其有吸引力。在这种情况下,有利的是,在前往该停车位的路上将所推荐的停车位的经由本发明识别的占用状态变化通知驾驶员。为此,另外的车辆(该驾驶员坐在其中)例如可以借助于相应的提示输出将该占用状态变化通知驾驶员。
26.此外,在本发明的范围内,提供了一种用于识别停车位的占用状态变化的装置。在此,根据本发明的装置包括处理器和用于在另外的车辆中检测无线电信号的通信器件,所述无线电信号由车辆借助于car-2-car通信发送。装置借助于其处理器设计成在另外的车辆中评估无线电信号,以便根据该评估来识别停车位被车辆空出或刚刚被车辆占用。
27.根据本发明的装置的优点相应于根据本发明的方法的优点,这些优点先前已详细阐明,从而在此不再重复。
28.有利地,根据本发明的装置设计用于执行根据本发明的方法。
29.最后,在本发明的范围内,提供一种车辆,其包括根据本发明的装置。
30.本发明相对于现有技术具有以下优点:
•ꢀ
与大多利用后端服务器工作的现有技术相比,本发明能够更迅速地提供关于停车位的占用状态变化(尤其关于空出的停车位)的信息;
•ꢀ
因为另外的车辆不必直接从旁边驶过以便获知其周围环境中的停车位的占用状态变化,本发明有利地具有更大的覆盖。也就是说,根据本发明,在更大的区域中搜索停车位;
•ꢀ
因为每个车辆在未来都将发出协同认知消息,想要获知其附近的占用状态变化的车辆仅需要相应的根据本发明的软件。
31.本发明尤其适合用于机动车。当然,但本发明不限于该优选的应用领域,因为本发明原则上还可以在其他交通工具(例如轮船、飞机、自行车、摩托车)中被使用。
附图说明
32.下面借助于根据本发明的优选的实施方式参考附图来详细描述本发明。
33.图1中示意性地示出了根据本发明的车辆,其具有根据本发明的装置。
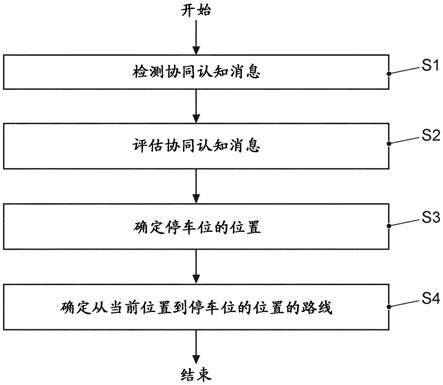
34.图2中示出了根据本发明的方法的流程图。
具体实施方式
35.图1中示出了根据本发明的车辆10,该车辆包括根据本发明的装置20。装置20本身包括处理器2、通信器件1和显示器3。经由通信器件1检测来自周围环境中的车辆的协同认知消息,根据本发明借助于处理器2来评估所述协同认知消息。然后可以利用显示器3显示关于停车位的占用状态变化的识别的评估结果。
36.协同认知消息总是以无线电信号的形式由每个车辆发出,即也在泊入过程和泊出过程期间和在其之后发出。在相应的车辆的周围环境中的另外的车辆10接收这些无线电信号或数据并且对其进行分析。在此使用的pwlan(its-g5)具有约为500m的有效范围。通过将车辆的借助于无线电信号传送的位置信息与地图进行比较,已经可以确定该车辆处于道路上或者处于停车位上。如果车辆的位置会由于所使用的卫星导航系统的不准确性而过于不准确,则可以使用经由无线电信号传送的另外的数据,以便明确地辨识占用状态变化。例如,所设置的闪光指示灯是针对泊入过程或泊出过程的另外的指示。也可以分析车辆的轨迹(其可以根据经由车辆的无线电信号传送的信息来确定),以便辨识占用状态变化。此外,泊入过程或泊出过程典型地在速度较低的情况下进行,使得关于车辆的速度或加速度的信息也可被用于识别占用状态变化。此外,还可以使用前进挡位和倒车档位之间的档位变化来更准确地识别占用状态变化。
37.如果另外的车辆10基于对从车辆检测到的无线电信号的分析得出该车辆刚刚泊出或已经泊出的结论,则该另外的车辆可以通知驾驶员并且如有可能同时自动计算前往空出的停车位的路线。
38.根据本发明确定的关于停车位的占用状态变化的识别的信息(即关于刚刚被空出的或刚刚被占用的停车位的信息)也可以例如经移动无线电发送到后端服务器处,使得该服务器可以更新其地图。与传统方法相比,优点在于,另外的车辆10不必直接从旁边驶过被空出的或刚刚被占用的停车位,以便识别占用状态变化。因为根据本发明,当停车位处于在车辆的视野之外时也识别该停车位的占用状态变化,因此与现有技术相比,通过单个的车辆可以实现更大的覆盖。
39.在将本发明与后端服务器联系时,还附加地可以经移动无线电提供相应的功能,使得该方法也可以由没有car-2-car通信的车辆使用,通过使驾驶员通过其智能手机收到信息。
40.在图2中示意性地示出了根据本发明的方法的流程图。在第一步骤s1中,在另外的车辆10内检测车辆的协同认知消息。
41.在下一步骤s2中,在另外的车辆10内评估这些协同认知消息,以便由此识别停车位的占用状态变化。
42.如果在步骤s2中的评估期间识别出停车位的空出,则在步骤s3中根据该车辆的协同认知消息的进一步评估来确定该停车位的位置。
43.最后,在步骤s4中,确定从另外的车辆10的当前位置到停车位的位置的路线。
44.附图标记列表1 通信器件2 处理器3 显示器10 车辆20 装置s1-s4 方法步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1