一种基于GPS的车辆右侧转弯报警系统及其方法与流程
一种基于gps的车辆右侧转弯报警系统及其方法
技术领域
1.本发明涉及一种基于gps的车辆右侧转弯报警系统及其方法,属于车载设备技术领域。
背景技术:
2.车辆在向右侧转向时,由于驾驶位在车辆左侧,从而导致车辆右侧存在的视觉盲区范围大,同时行人、自行车等往往也均位于车辆的右侧方向通行,从而导致车辆右转作业时极易因盲区影响而引发交通事故,这一现象尤其在大货车等车辆问题中尤为突出。
3.因此针对这一问题,迫切需要开发一种基于gps的车辆右侧转弯报警系统及其方法,以满足实际使用的需要。
技术实现要素:
4.为了解决现有技术上的不足,本发明提供一种基于gps的车辆右侧转弯报警系统及其方法,可对车辆转向作业的运行状态进行监控及预警。
5.一种基于gps的车辆右侧转弯报警系统,包括dvr主机、外侧检测终端、同轴检测终端、gps卫星通讯装置、无线通讯网关、主控终端,所述dvr主机、gps卫星通讯装置、无线通讯网关、主控终端均嵌于车辆主控台并与车辆行车电脑电路电气连接, gps卫星通讯装置、无线通讯网关均通过无线通讯网络与外部卫星定位系统及远程监控系统建立数据连接;主控终端另与gps卫星通讯装置、无线通讯网关及dvr主机电气连接,外侧检测终端共两个,其中一个与车辆右侧后视镜外表面连接,另一个与车辆右侧尾灯处车体外侧面连接,同轴检测终端共一个并位于车辆重心位置,其中所述外侧检测终端、同轴检测终端间相互并联,并分别与dvr主机及主控终端电气连接,其中外侧检测终端间轴线相互平行分布并与车体轴线垂直分布,且外侧检测终端轴线与地平面呈0
°
—60
°
。
6.上述基于gps的车辆右侧转弯报警系统中,所述的外侧检测终端包括承载壳体、激光测距仪、微波测距仪、主ccd摄像头、辅助ccd摄像头、温湿度传感器、三轴陀螺仪、加速度传感器、三维转台、主透镜组、凸面镜、导向臂、驱动电路,所述承载壳为横断面呈矩形的闭合腔体结构,所述主ccd摄像头、辅助ccd摄像头、激光测距仪、微波测距仪及温湿度传感器均一个,并均嵌于承载壳体前端面内,其中所述主ccd摄像头光轴与激光测距仪、微波测距仪轴线平行分布,并与承载壳体前端面呈30
°
—90
°
夹角,所述辅助ccd摄像头光轴与主ccd摄像头光轴相交并呈30
°
—90
°
夹角,且辅助ccd摄像头光轴与凸面镜球心相交,所述凸面镜轴线位于承载壳体前端面前方至少10毫米处,并与车辆外侧面相交,且交点与凸面镜间间距为车身长度的至少2/3,所述凸面镜后端面通过导向臂与承载壳体外表面连接,且导向臂两端分别通过三维转台与承载壳体及凸面镜铰接,所述主透镜组嵌于承载壳体外表面,与主ccd摄像头同轴分布并包覆在主ccd摄像头前端面外,所述三轴陀螺仪、加速度传感器、驱动电路均嵌于承载壳体内,且所述驱动电路分别与激光测距仪、微波测距仪、主ccd摄像头、辅助ccd摄像头、温湿度传感器、三轴陀螺仪、三维转台电气连接。
7.上述基于gps的车辆右侧转弯报警系统中,所述的主透镜组包括承载龙骨、平面镜、凸透镜、凹透镜、分化板、电加热丝、导向环、螺旋导向轨、回转驱动机构及补光灯,其中承载龙骨为圆柱空心框架结构,其外表面设1
‑
2条环绕承载龙骨轴线呈螺旋状结构分布的电加热丝,内表面设至少两条环绕承载龙骨轴线呈螺旋状结构分布的螺旋导向轨,所述平面镜共两个,所述凸透镜、凹透镜、分化板均至少一个,其中两平面镜通过导向环嵌于承载龙骨前端面及后端面内并与承载龙骨同轴分布,且分化板位于承载龙骨前端面的平面镜后方,并与该平面镜与同一导向环连接,所述凸透镜、凹透镜、分别通过导向环与承载龙骨内表面连接,且所述凸透镜、凹透镜所连接的导向环外表面设回转驱动机构,并通过回转驱动机构与螺旋导向轨滑动连接,所述补光灯至少一个,嵌于承载龙骨前端面并与承载龙骨轴线平行分布,所述电加热丝、回转驱动机构及补光灯均与驱动电路电气连接。
8.进一步的,所述的同轴检测终端包括承载机架、检测头、倾角传感器、三轴陀螺仪、加速度传感器及驱动电路,其中所述承载机架为横断面呈“凵”字形槽装结构,所述检测头嵌于承载机架内,与承载机架同轴分布并与承载机架侧壁通过滑槽滑动连接,所述倾角传感器、三轴陀螺仪、加速度传感器及驱动电路均嵌于检测头内,且所述驱动电路分别与倾角传感器、三轴陀螺仪、加速度传感器电气连接。
9.上述基于gps的车辆右侧转弯报警系统中,所述的dvr主机、gps卫星通讯装置、无线通讯网关及主控终端间通过机架连接,所述机架为轴向截面呈矩形的框架结构,所述机架包覆在dvr主机、gps卫星通讯装置、无线通讯网关及主控终端外,并通过滑槽分别与dvr主机、gps卫星通讯装置、无线通讯网关及主控终端间滑动连接,所述机架后端面另设若干接线端子,所述接线端子分别与dvr主机、gps卫星通讯装置、无线通讯网关及主控终端电气连接,且dvr主机、gps卫星通讯装置、无线通讯网关及主控终端通过接线端子与外侧检测终端、同轴检测终端及车辆行车电脑电路电气连接。
10.上述基于gps的车辆右侧转弯报警系统中,所述主控终端包括基于fpga芯片为基础的数据处理电路,pid计算电路、mos驱动电路、编码译码电路、i/o通讯端口电路、数据缓存电路、串口通讯电路、基于晶闸管的电子开关电路及并口通讯电路,所述数据处理电路分别与pid计算电路、编码译码电路、数据缓存电路和基于晶闸管的电子开关电路电气连接,另通过基于晶闸管的电子开关电路分别与mos驱动电路、i/o通讯端口电路、串口通讯电路及并口通讯电路电气连接。
11.进一步的,所述基于fpga芯片为基础的数据处理电路另设滤波电路、信号放大电路。
12.进一步的,所述远程监控系统为基于云计算的服务器平台。
13.基于gps的车辆右侧转弯报警系统的报警方法,包括如下步骤:s1,设备装配,首先将dvr主机、gps卫星通讯装置、无线通讯网关、主控终端安装到车辆的中控台内,并与车辆的行车电脑电路电气连接,同时将gps卫星通讯装置、无线通讯网关通过通讯网络与外部卫星定位系统及远程监控系统建立数据连接,并由远程监控系统为主控终端分配独立数据通讯地址;然后在车辆的车身上安装外侧检测终端、同轴检测终端,并使外侧检测终端、同轴检测终端与主控终端间建立数据连接,同时将主控系统通过行车电脑电路与车辆的转向助力系统、转向灯系统电气连接,即可完成设备装配;s2,检测系统设置,完成s1步骤后,在主控终端中录入车辆转向路径计算函数,并
为车辆转向路径计算函数中录入车速、气温、车身长度、车辆自重、环境湿度、车辆与车辆右侧障碍物间间距、车辆与车辆右侧障碍物间相对速度、转向作用力及制动力变量阀值,同时根据车辆车身与障碍物之间间距及相对速度设定转向轨迹匹配容差值;s3,转向监控,在车辆运行中,首先通过gps卫星通讯装置对车辆的运行路径轨迹、车速进行检测,并对运行路径上涉及到右转的路段进行标记,同时对转向半径数据进行采集,然后通过外侧检测终端、同轴检测终端对车辆运行时的车速、车辆外部温度湿度环境、车辆与右侧障碍物间的间距进行检测,并在车辆进入到所标记右转路段前100—500米范围内通过s2步骤设定的车辆转向路径计算函数对当前车辆右转时理论车速、转向半径进行初步计算,得到车辆转向理论导引路径,并通过外侧检测终端、同轴检测终端对车辆运行状态持续检测,一方面将检测到的参数带入到s2步骤设定的车辆转向路径计算函数中,然后跟新录入的参数对车辆转向理论导引路径进行修正,另一方面通过外侧检测终端、同轴检测终端对车辆重心、车首及车尾运行轨迹、加速度、倾斜角度进行检测,并根据检测到的实际车辆运行轨迹通过s2步骤设定的车辆转向路径计算函数进行分析,得到车辆转向轨迹,最后将车辆转向轨迹与计算得到的车辆转向理论导引路径进行比对,并在容差范围值内时则引导车辆转向,超出容差值范围后,则通过行车电脑电路进行报警;同时在车辆转向过程中,另对车辆右侧的路况进行视频采集,并将采集的视频信号通过dvr主机进行转化处理,同时通过行车电脑电路进行视频信号输出,此外,在车辆转向过程中,另通过gps卫星通讯装置、无线通讯网关对车辆转向时实际运行轨迹、车辆检测到的各转向参数同步发送至远程监控系统中存储备用,实现对车辆运行状态进行引导监控。
14.本发明设备通用性好,检测精度高,通讯能力强,一方面可有效满足多种车辆右转路径规划、转向监控作业的需要;另一方面可对车辆转向作业的运行状态进行监控及预警,从而极大的提高了车辆运行的安全性和可靠性。
附图说明
15.下面结合附图和具体实施方式来详细说明本发明;图1为本发明系统结构示意图;图2为dvr主机、gps卫星通讯装置、无线通讯网关、主控终端连接结构示意图;图3为外侧检测终端结构示意图;图4为主透镜组结构示意图;图5为同轴检测终端结构示意图;图6为主控终端结构示意图。
具体实施方式
16.为使本发明实现的技术手段、创作特征、达成目的与功效易于施工,下面结合具体实施方式,进一步阐述本发明。
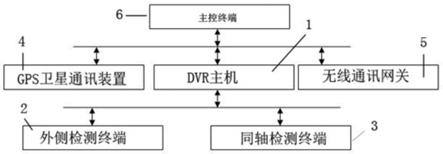
17.如图1所示,一种基于gps的车辆右侧转弯报警系统,包括dvr主机1、外侧检测终端2、同轴检测终端3、gps卫星通讯装置4、无线通讯网关5、主控终端6,dvr主机1、gps卫星通讯装置4、无线通讯网关5、主控终端6均嵌于车辆主控台并与车辆行车电脑电路电气连接,gps卫星通讯装置4、无线通讯网关5均通过无线通讯网络与外部卫星定位系统及远程监控系统
建立数据连接;主控终端6另与gps卫星通讯装置4、无线通讯网关5及dvr主机1电气连接,外侧检测终端2共两个,其中一个与车辆右侧后视镜外表面连接,另一个与车辆右侧尾灯处车体外侧面连接,同轴检测终端3共一个并位于车辆重心位置,其中外侧检测终端2、同轴检测终端3间相互并联,并分别与dvr主机1及主控终端6电气连接,其中外侧检测终端2间轴线相互平行分布并与车体轴线垂直分布,且外侧检测终端2轴线与地平面呈0
°
—60
°
。
18.如图2所示,上述基于gps的车辆右侧转弯报警系统中,所述的dvr主机1、gps卫星通讯装置4、无线通讯网关5及主控终端6间通过机架7连接,所述机架7为轴向截面呈矩形的框架结构,所述机架7包覆在dvr主机1、gps卫星通讯装置4、无线通讯网关5及主控终端6外,并通过滑槽8分别与dvr主机1、gps卫星通讯装置4、无线通讯网关5及主控终端6间滑动连接,所述机架7后端面另设若干接线端子9,所述接线端子9分别与dvr主机1、gps卫星通讯装置4、无线通讯网关5及主控终端6电气连接,且dvr主机1、gps卫星通讯装置4、无线通讯网关5及主控终端6通过接线端子9与外侧检测终端2、同轴检测终端3及车辆行车电脑电路电气连接。
19.如图3所示,重点说明的,所述的外侧检测终端2包括承载壳体21、激光测距仪22、微波测距仪23、主ccd摄像头24、辅助ccd摄像头25、温湿度传感器26、三轴陀螺仪27、加速度传感器28、三维转台29、主透镜组20、凸面镜201、导向臂202、驱动电路203,所述承载壳体21为横断面呈矩形的闭合腔体结构,所述主ccd摄像头24、辅助ccd摄像头25、激光测距仪22、微波测距仪23及温湿度传感器26均一个,并均嵌于承载壳体21前端面内,其中所述主ccd摄像头24光轴与激光测距仪22、微波测距仪23轴线平行分布,并与承载壳体21前端面呈30
°
—90
°
夹角,所述辅助ccd摄像头25光轴与主ccd摄像头24光轴相交并呈30
°
—90
°
夹角,且辅助ccd摄像头25光轴与凸面镜201球心相交,所述凸面镜201轴线位于承载壳体21前端面前方至少10毫米处,并与车辆外侧面相交,且交点与凸面镜201间间距为车身长度的至少2/3,所述凸面镜201后端面通过导向臂202与承载壳体21外表面连接,且导向臂202两端分别通过三维转台29与承载壳体21及凸面镜201铰接,所述主透镜组20嵌于承载壳体21外表面,与主ccd摄像头24同轴分布并包覆在主ccd摄像头24前端面外,所述三轴陀螺仪27、加速度传感器28、驱动电路203均嵌于承载壳体21内,且所述驱动电路203分别与激光测距仪22、微波测距仪23、主ccd摄像头24、辅助ccd摄像头25、温湿度传感器26、三轴陀螺仪27、三维转台29电气连接。
20.如图4所示,需要特别注意的,所述的主透镜组20包括承载龙骨211、平面镜212、凸透镜213、凹透镜214、分化板215、电加热丝216、导向环217、螺旋导向轨218、回转驱动机构219及补光灯210,其中承载龙骨211为圆柱空心框架结构,其外表面设1
‑
2条环绕承载龙骨211轴线呈螺旋状结构分布的电加热丝216,内表面设至少两条环绕承载龙骨211轴线呈螺旋状结构分布的螺旋导向轨218,所述平面镜212共两个,所述凸透镜213、凹透镜214、分化板215均至少一个,其中两平面镜212通过导向环217嵌于承载龙骨211前端面及后端面内并与承载龙骨211同轴分布,且分化板215位于承载龙骨211前端面的平面镜212后方,并与该平面镜212与同一导向环217连接,所述凸透镜213、凹透镜214、分别通过导向环217与承载龙骨211内表面连接,且所述凸透镜213、凹透镜214所连接的导向环217外表面设回转驱动机构219,并通过回转驱动机构219与螺旋导向轨218滑动连接,所述补光灯210至少一个,嵌于承载龙骨211前端面并与承载龙骨211轴线平行分布,所述电加热丝216、回转驱动机构
219及补光灯210均与驱动电路203电气连接。
21.如图5所示,与此同时,所述的同轴检测终端3包括承载机架31、检测头32、倾角传感器33、三轴陀螺仪27、加速度传感器28及驱动电路203,其中所述承载机架31为横断面呈“凵”字形槽装结构,所述检测头32嵌于承载机架31内,与承载机架31同轴分布并与承载机架31侧壁通过滑槽8滑动连接,所述倾角传感器33、三轴陀螺仪27、加速度传感器28及驱动电路203均嵌于检测头32内,且所述驱动电路203分别与倾角传感器33、三轴陀螺仪27、加速度传感器28电气连接。
22.进一步优化的,所述驱动电路203为基于dsp芯片、fpga芯片中的任意一种。
23.如图6所示,其中,所述主控终端6包括基于fpga芯片为基础的数据处理电路,pid计算电路、mos驱动电路、编码译码电路、i/o通讯端口电路、数据缓存电路 、串口通讯电路、基于晶闸管的电子开关电路及并口通讯电路,所述数据处理电路分别与pid计算电路、编码译码电路、数据缓存电路和基于晶闸管的电子开关电路电气连接,另通过基于晶闸管的电子开关电路分别与mos驱动电路、i/o通讯端口电路、串口通讯电路及并口通讯电路电气连接。本实施例中,基于fpga芯片为基础的数据处理电路另设滤波电路、信号放大电路。远程监控系统为基于云计算的服务器平台。
24.基于gps的车辆右侧转弯报警系统的报警方法,包括如下步骤:s1,设备装配,首先将dvr主机1、gps卫星通讯装置4、无线通讯网关5、主控终端6安装到车辆的中控台内,并与车辆的行车电脑电路电气连接,同时将gps卫星通讯装置4、无线通讯网关5通过通讯网络与外部卫星定位系统及远程监控系统建立数据连接,并由远程监控系统为主控终端6分配独立数据通讯地址;然后在车辆的车身上安装外侧检测终端2、同轴检测终端3,并使外侧检测终端2、同轴检测终端3与主控终端6间建立数据连接,同时将主控系统通过行车电脑电路与车辆的转向助力系统、转向灯系统电气连接,即可完成设备装配;s2,检测系统设置,完成s1步骤后,在主控终端6中录入车辆转向路径计算函数,并为车辆转向路径计算函数中录入车速、气温、车身长度、车辆自重、环境湿度、车辆与车辆右侧障碍物间间距、车辆与车辆右侧障碍物间相对速度、转向作用力及制动力变量阀值,同时根据车辆车身与障碍物之间间距及相对速度设定转向轨迹匹配容差值;s3,转向监控,在车辆运行中,首先通过gps卫星通讯装置4对车辆的运行路径轨迹、车速进行检测,并对运行路径上涉及到右转的路段进行标记,同时对转向半径数据进行采集,然后通过外侧检测终端2、同轴检测终端3对车辆运行时的车速、车辆外部温度湿度环境、车辆与右侧障碍物间的间距进行检测,并在车辆进入到所标记右转路段前100—500米范围内通过s2步骤设定的车辆转向路径计算函数对当前车辆右转时理论车速、转向半径进行初步计算,得到车辆转向理论导引路径,并通过外侧检测终端2、同轴检测终端3对车辆运行状态持续检测,一方面将检测到的参数带入到s2步骤设定的车辆转向路径计算函数中,然后跟新录入的参数对车辆转向理论导引路径进行修正,另一方面通过外侧检测终端2、同轴检测终端3对车辆重心、车首及车尾运行轨迹、加速度、倾斜角度进行检测,并根据检测到的实际车辆运行轨迹通过s2步骤设定的车辆转向路径计算函数进行分析,得到车辆转向轨迹,最后将车辆转向轨迹与计算得到的车辆转向理论导引路径进行比对,并在容差范围值内时则引导车辆转向,超出容差值范围后,则通过行车电脑电路进行报警;同时在车辆转向
过程中,另对车辆右侧的路况进行视频采集,并将采集的视频信号通过dvr主机1进行转化处理,同时通过行车电脑电路进行视频信号输出,此外,在车辆转向过程中,另通过gps卫星通讯装置4、无线通讯网关5对车辆转向时实际运行轨迹、车辆检测到的各转向参数同步发送至远程监控系统中存储备用,实现对车辆运行状态进行引导监控。
25.本发明的外侧检测终端在运行中,一方面通过主ccd摄像头和主透镜组配合,对与车身轴线垂直方向上右侧路况进行检测,同时通过主透镜组可辅助主ccd摄像头调整检测焦距及检测范围,同时另通过主透镜组的分划板对主ccd摄像头视场范围进行初步划分测量,同时通过激光测距仪、微波测距仪对完成初步划分测量目标物再进行测距,从而达到精确测量车身与道路障碍物间间距的目的;另一方面通过辅助ccd摄像头和凸面镜对车身右侧范围进行大范围观测,达到提前预警的目的。
26.此外主透镜组运行时,一方面可通过设置的补光灯对采光条件不良时进行补光,提高观测清晰度,另一方面通过电加热丝对平面镜、凸透镜、凹透镜、分化板进行烘干作业,防止镜面产生水雾影响观测精度和清晰度。
27.本发明设备通用性好,检测精度高,通讯能力强,一方面可有效满足多种车辆右转路径规划、转向监控作业的需要;另一方面可对车辆转向作业的运行状态进行监控及预警,从而极大的提高了车辆运行的安全性和可靠性。
28.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1