一种基于AIS数据的航道交通流量预测方法
一种基于ais数据的航道交通流量预测方法
技术领域
1.本发明涉及一种航道交通流量预测方法,尤其是涉及一种基于ais数据的航道交通流量预测方法。
背景技术:
2.船舶流量预测是船舶交通流研究的重要内容,建立科学合理的船舶流量预测有助于航道的设计、规划和管理。内河断面船舶交通流量特征分析是编制航道发展规划、保障通航安全、评价航道承载力的基础与前提。现存的船舶交通流量预测方法,多是采用时间序列分析方法,对单一断面的船舶交通流量进行分析与预测,但单一时刻及单一断面而构建的航道内船舶交通流预测精度较低,不能有效地捕获交通流量的复杂非线性,未充分捕捉到复杂时空依赖性的不足,忽略了临近时刻与历史周期时刻下的交通流与下一时刻交通流关联关系与影响,以致预测精度不高。
技术实现要素:
3.本发明所要解决的技术问题是提供一种预测精度较高的基于ais数据的航道交通流量预测方法。
4.本发明解决上述技术问题所采用的技术方案为:一种基于ais数据的航道交通流量预测方法,包括以下步骤:
5.步骤1、确定研究区域,提取该研究区域的原始ais数据,具体为:首先确定需要进行交通流量预测的航道段起始位置和终止位置的经度和纬度,再以该航道段为中心,将该航道段的宽度扩大为原来的五倍,长度扩大为原来的两倍,此时得到的区域即为研究区域,从船讯网上获得研究区域当前日期开始至少30天的历史ais数据作为研究区域的原始ais数据,将研究区域的原始ais数据存放在数据库1中;
6.步骤2、选取4个交通流观测断面,具体为:根据该研究区域的航路船舶定线制和报告制示意图了解需要进行交通流量预测的航道段的平面分布情况以及锚地对于船舶进出港的影响,选取需要进行交通流量预测的航道段起始位置、终止位置、中间位置以及船舶交通流量预测的航道段之前最后一个锚地的起始位置作为交通流观测断面,由此确定4个交通流观测断面;
7.步骤3、分别提取在步骤2中选取的4个交通流观测断面的原始ais数据,并分别对4个交通流观测断面的原始ais数据进行如下处理:首先分析交通流观测断面的原始ais数据特征,对于数据冗余的异常数据进行删除处理,对数据缺失值采用均值中位数填充的方法进行填充,将经度和纬度为负值或偏离需要进行交通流量预测的航道段的数据清洗除掉,从而得到4个交通流观测断面的预处理ais数据,将4个交通流观测断面的预处理ais数据合并后得到预处理ais数据集,然后将预处理ais数据集存放在数据库2中;
8.从数据库2的预处理ais数据集中获取船舶参数,船舶参数包括mmsi、经度、纬度、船速、航向、船长、速度变化率以及航向变化率;根据船舶参数,判断4个交通流观测断面处
每个船舶的船舶位置、行驶方向以及行驶速度,以30min为一个时间段统计4个交通流观测断面处每个时间段的船舶交通流量数据,存储到数据库3中;
9.步骤4、选取matlab软件中bp神经网络模型,并设置bp神经网络模型为三层的bp神经网络模型,三层分别为输入层、隐藏层和输出层,输入层的神经元数量为3个,隐藏层的神经元数量为9个,输出层的神经元数量为1个;选取4条交通流预测断面1个月的船舶交通流量数据作为样本来对bp神经网络模型进行训练,其中将4条交通流观测断面1个月的船舶交通流量数据按相邻前3个时段的船舶交通流量作为输入,第4个时段的待预测交通流观测断面的船舶交通流量为输出,随机选取70%的样本为训练数据,15%作为验证数据,15%作为测试数据,选择levenberg-marquardt算法作为训练算法进行训练,每次训练后均得到的均方误差值mse和回归r值,一共训练30次,选取拟合效果最好的bp神经网络模型的作为训练好的bp神经网络模型;
10.步骤5、对当前时段的下一时段的航道交通流量进行预测时,将下一时段记为t时段,按照步骤3和步骤4的方法得到4条交通流观测断面t时段之前的3个时段的船舶交通流量数据,即t-1时段、t-2时段和t-3时段的船舶交通流量数据,将t-1时段、t-2时段和t-3时段的船舶交通流量数据作为输入,输入到matlab软件中训练好的bp神经网络模型中,此时训练好的bp神经网络模型的输出即为t时段的船舶交通流量数据,t时段航道交通流量预测完成。
11.与现有技术相比,本发明的优点在于通过确定研究区域后确定4个交通流观测断面后,然后基于4个交通流观测断面的原始ais数据确定4个交通流观测断面的交通流量数据,采用4个交通流观测断面的交通流量数据构建训练样本,对matlab软件中bp神经网络模型进行训练,继而采用训练后的bp神经网络模型进行交通流量预测,由此,将4个交通流观测断面看成一个整体考虑,考虑看作一个整体的相邻4个交通流观测断面地交通流量的变化规律和各种影响因素,综合使用4个交通流观测断面的交通流量数据进行定量分析后再选取bp神经网络模型进行预测,从而提高交通流预测精度,交通流量预测精度较高。
附图说明
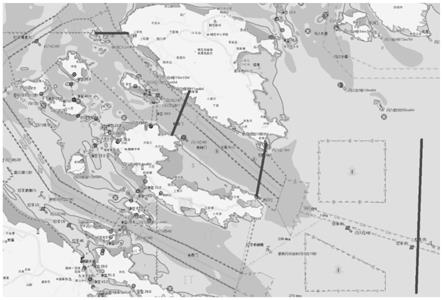
12.图1为本发明的基于ais数据的航道交通流量预测方法的实施例中所采用的虾峙门航道图;
13.图2为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型的结构图;
14.图3为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型训练过程中预测值和真实值、误差的分析图;
15.图4为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型训练数据、验证数据、测试数据和总体的均方误差随训练次数的变化图;
16.图5(a)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中梯度信息的可视化图;
17.图5(b)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中误差精度mu的可视化图;
18.图5(c)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训
练过程中泛化能力变换信息的可视化图;
19.图6(a)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中训练样本数据的回归能力分析图;
20.图6(b)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中验证样本数据的回归能力分析图;
21.图6(c)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中测试样本数据的回归能力分析图;
22.图6(d)为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型在训练过程中总体的回归能力分析图;
23.图7为本发明的基于ais数据的航道交通流量预测方法的bp神经网络模型的训练数据、验证数据和测试数据的误差分布直方图。
具体实施方式
24.以下结合附图实施例对本发明作进一步详细描述。
25.实施例:一种基于ais数据的航道交通流量预测方法,包括以下步骤:
26.步骤1、选取如图1所示的虾峙门航道作为研究航道,首先确定需要进行交通流量预测的航道段起始位置(29.76700n,122.30980e)到(29.74640n,122.30400e),和终止位置(29.83390n,122.20500e)到(29.83700n,122.21900e)的经度和纬度,再以该航道段为中心,将该航道段的宽度扩大为原来的五倍,长度扩大为原来的两倍,此时得到的区域即为研究区域,从船讯网上获得研究区域2019年1月1日凌晨0:00到31日晚上24:00的原始ais数据,将研究区域的原始ais数据存放在数据库1中;
27.步骤2、根据《宁波舟山核心港区深水航路船舶定线制和报告制示意图》了解虾峙门航道平面分布情况以及锚地对于船舶进出港的影响,选取需要进行交通流量预测的4个交通流观测断面,4个交通流观测断面位于图1中四条直线标注处,第1个交通流观测断面的经纬度从(29.77500n,122.39890e)到(29.68960n,122.39110e),第2个交通流观测断面的经纬度从(29.76700n,122.30980e)到(29.74640n,122.30400e),第3个交通流观测断面的经纬度从(29.79940n,122.25930e)到(29.77800n,122.25020e),第4个交通流观测断面的经纬度从(29.83390n,122.20500e)到(29.83700n,122.21900e);
28.步骤3、分别提取在步骤2中选取的4个交通流观测断面的原始ais数据,并分别对4个交通流观测断面的原始ais数据进行如下处理:首先分析交通流观测断面的原始ais数据特征,对于数据冗余的异常数据进行删除处理,对数据缺失值采用均值中位数填充的方法进行填充,将经度和纬度为负值或偏离需要进行交通流量预测的航道段的数据清洗除掉,从而得到4个交通流观测断面的预处理ais数据,将4个交通流观测断面的预处理ais数据合并后得到预处理ais数据集,然后将预处理ais数据集存放在数据库2中;
29.从数据库2的预处理ais数据集中获取船舶参数,船舶参数包括mmsi、经度、纬度、船速、航向、船长、速度变化率以及航向变化率;根据船舶参数,判断4个交通流观测断面处每个船舶的船舶位置、行驶方向以及行驶速度,以30min为一个时间段统计4个交通流观测断面处每个时间段的船舶交通流量数据,存储到数据库3中;
30.步骤4、选取matlab软件中bp神经网络模型,并设置bp神经网络模型为三层的bp神
经网络模型,三层分别为输入层、隐藏层和输出层,输入层的神经元数量为3个,隐藏层的神经元数量为9个,输出层的神经元数量为1个;选取4条交通流预测断面1个月的船舶交通流量数据作为训练样本来对bp神经网络模型进行训练,其中将4条交通流观测断面从2019年1月1日凌晨0:00到30日晚上24:00的船舶交通流量数据按相邻前3个时段的船舶交通流量作为输入,第4个时段的待预测交通流观测断面的船舶交通流量为输出,随机选取1008个样本为训练数据,216个样本作为验证数据,216个样本作为测试数据,选择levenberg-marquardt算法作为训练算法进行训练,每次训练后均得到的均方误差值mse和回归r值,一共训练30次,选取拟合效果最好的bp神经网络模型的作为训练好的bp神经网络模型;
31.步骤5、对2019年1月31日8:00到8:30的交通流量数据进行预测,按照步骤3和步骤4的方法得到4条交通流观测断面此时段之前的3个时段的船舶交通流量数据,即2019年1月31日6:30到7:00、7:00到7:30、7:30到8:00的船舶交通流量数据作为输入,输入到matlab软件中训练好的bp神经网络模型中,此时训练好的bp神经网络模型的输出即为2019年1月31日8:00到8:30时段的船舶交通流量数据,预测完成。预测数据与来自海事局官网的该航道观测的交通流量数据基本一致,由此本发明具有较高的精度。
32.本发明的基于ais数据的航道交通流量预测方法中,bp神经网络模型在训练过程中预测值和真实值、误差的分析图如图3所示。bp神经网络模型在训练过程中训练数据、验证数据、测试数据和总体的均方误差随训练次数的变化图如图4所示,图4中,小圆圈位置代表终止的训练次数处的均方误差,train线表示bp神经网络模型训练过程中的mse指标在每一代中的指标的性能,validation线表示bp神经网络模型交叉验证过程的均方误差mse指标在每一代中的性能,test线表示bp神经网络模型测试过程的均方误差mse指标在每一代中执行的过程,这是bp神经网络模型计算/训练结果,best虚线表示bp神经网络模型被训练到第12代时,bp神经网络模型训练结果最佳。bp神经网络模型的训练状况图如图5(a)~图5(c)所示,5(a)是bp神经网络模型训练过程中梯度信息的可视化图,分析图5(a)可知,该bp神经网络模型的最大梯度为78.9,阈值梯度为1e-07,实际梯度为1.203;5(b)是误差精度mu的可视化图,分析图5(b)可知,该bp神经网络模型所使用levenberg-marquardt算法中误差精度最小值为0.001,阈值为1e-10,误差精度的实际值为1e-05;5(c)是泛化能力变换信息的可视化图,若连续6次训练误差无法降低,则结束训练任务。各个样本数据和总体的回归曲线图如图6(a)至图6(d)所示,训练(training)样本集的回归能力为0.58982,验证(validation)样本集的回归能力为0.56587,测试(test)样本集的回归能力为0.53777,总体(all)数据回归能力为0.57766,分析图6(a)至图6(d)可知,回归能力较好。训练数据、验证数据和测试数据的误差分布直方图如图7所示,分析图7可知,大多数的数据误差都小于1,误差较小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1