MGP模封装自动化生产线的制作方法
mgp模封装自动化生产线
技术领域
1.本发明涉及一种mgp模封装自动化生产线,属于塑封技术领域。
背景技术:
2.伴随着工业4.0的到来,半导体产业需求大幅增长,从而推动国内电子封装高速发展。目前,国内半导体制造业正慢慢进入成熟阶段,超高速计算机、数字化视听、移动通讯和便携式电子机器的火爆出现直接带动了芯片电子封装技术的进步。在这样的大背景下,当下制造行业的智能化越来越高,但半导体电路封装的自动化程度还是不高,在工作时,一般采用手工投料、包封以及取料,工人的工作量比较大,劳动强度较大,但工作效率低。
3.鉴于以上原因,需要设计一种mgp(多注射头封装模具)模封装自动化生产线来提高半导体电路封装的自动化程度。
技术实现要素:
4.本发明的目的在于提供一种mgp模封装自动化生产线,以解决上述背景技术中提出的现有的半导体电路封装技术自动化程度不高的问题。
5.为实现上述目的,本发明提供如下技术方案:一种mgp模封装自动化生产线,它包括自动料饼机、自动排片机、包封机、冲胶机、自动下料机、六轴机械臂、料饼架以及芯片架;
6.所述自动料饼机上设置有配料架存放框;
7.所述六轴机械臂与包封机之间设置有机械臂安装架,所述机械臂安装架一端固定于包封机上,所述六轴机械臂连接于机械臂安装架上,述料饼架能够与六轴机械臂配合并相接,所述芯片架能够与六轴机械臂配合并相接。
8.优选的,所述自动料饼机包括振动盘装置,所述振动盘装置的输出侧设置有料饼机;所述振动盘装置包括振动盘安装架,所述振动盘安装架上安装有振动盘,所述料饼机包括料饼机机架,所述料饼机机架顶部为料饼机工位,所述料饼机工位上设置有纵向导轨机构,所述料饼机工位上还设置有纵向导轨,所述纵向导轨机构与纵向导轨均处于料饼机工位的边缘位置,所述纵向导轨机构与纵向导轨上滑动设置有横向导轨机构,所述横向导轨机构上设置有料饼机械手。
9.优选的,所述料饼机械手包括机械手架,所述机械手架分为滑动配合部和机械手安装部,所述滑动配合部滑动配合于导向条上,所述机械手安装部上连接有机械手机构;
10.所述机械手机构包括机械手气缸,所述机械手气缸固定于机械手安装部上,所述机械手气缸的活塞杆端连接有料饼抓取部。
11.优选的,所述包封机包括包封机本体,所述包封机的工位处于包封机本体的中部,所述包封机的工位上设置有工作台,所述包封机的工位四角处各向上垂直设置有立柱,所述立柱上设置有自动清模机构;
12.所述自动清模机构包括互相平行布置的移动滑轨,所述移动滑轨上设置有四个立柱配合部,所述立柱与自动清模机构滑动配合,两根移动滑轨之间设置有毛刷组件,所述毛
刷组件通过链条驱动能够在移动滑轨上滑动。
13.优选的,所述毛刷组件包括两块连接板,两块连接板外部与移动滑轨滑动配合,两块连接板内部设置有多个连接座,相对的两个连接座之间连接有伸缩杆件,所述伸缩杆件上由上而下依次设置有上模毛刷组件和下模毛刷组件,所述上模毛刷组件与下模毛刷组件的两端均设置有抬起气缸;
14.所述伸缩杆件包括直杆,所述直杆上套设有上下两个滑动件,上方的滑动件与上模毛刷组件连接,下方的滑动件与下模毛刷组件连接。
15.优选的,所述上模毛刷组件包括两个上模毛刷组件安装座,所述上模毛刷组件安装座分为上模毛刷配合部和上模毛刷组件连接部,两个上模毛刷配合部之间连接有上模毛刷框,所述上模毛刷框内设置有上模毛刷,两个上模毛刷组件连接部分别与对应的滑动件固定连接,两个上模毛刷组件连接部上分别设置有气缸连接座,两个气缸连接座分别与对应的抬起气缸活塞杆相连接,任一上模毛刷组件安装座的上模毛刷配合部上设置有上模毛刷电机组件,所述上模毛刷电机组件与上模毛刷之间通过皮带相配合。
16.优选的,所述自动下料机包括下料机本体,所述下料机本体顶部为下料机工位,所述下料机工位上分别设置有四轴机械手、料架放置区以及芯片放置处。
17.优选的,所述六轴机械臂包括第一关节、第二关节、第三关节、第四关节以及机械臂安装座,所述第一关节末端设置有框架配合部,所述框架配合部能够与料饼架或芯片架配合连接,所述第一关节转动连接于第二关节上,所述第二关节转动连接于第三关节上,所述第三关节转动连接于第四关节上,所述第四关节转动连接于机械臂安装座上,所述机械臂安装座固定连接于机械臂安装架上。
18.优选的,所述料饼架包括料饼架本体,所述料饼架本体外部轮廓为矩形结构,所述料饼架本体沿着中线对称挖设有两个投放架安装部,所述投放架安装部上间隔连接有多个料饼投放板,每个料饼投放板顶部间隔开设有多个料饼投放孔,多个料饼投放板的底部设置有料饼挡板组件,所述料饼架本体上设置有第一机械臂配合组件,所述第一机械臂配合组件能够与框架配合部相配合连接。
19.优选的,所述芯片架包括芯片架本体,所述芯片架本体上设置有四个的芯片配合部,所述芯片配合部为镂空结构,所述芯片配合部上设置有芯片搁置架,所述芯片配合部的边缘还设置有多个芯片搁置条,所述芯片架本体的一侧设置有第二机械臂配合组件,所述第二机械臂配合组件能够与框架配合部相配合连接。
20.与现有技术相比,本发明提供了一种mgp模封装自动化生产线,具备以下有益效果:
21.1、一种mgp模封装自动化生产线,采用六轴机械臂实现对料饼架、芯片架的自动搬运,解放了工人的双手,减少了工人的工作量,降低了工人的劳动强度,提高了工作效率,从而提高了半导体电路封装技术自动化程度;
22.2、一种mgp模封装自动化生产线,采用振动盘输送料饼,采用料饼机械手自动抓取料饼并将料饼放置在料饼架上指定的位置,避免了工人的重复劳动,提高了工作效率;
23.3、一种mgp模封装自动化生产线,通过设计一种料饼架,可以在塑封时将料饼自动投放至芯片架上芯片对应的位置,不需要人为手动操作,不仅减轻了工人的劳动强度,而且提高了效率,降低了料饼投放的出错率;
24.4、一种mgp模封装自动化生产线,在包封机内设置自动清模机构,不需要人为对模具再进行清洗,节约了人力成本;
25.5、一种mgp模封装自动化生产线,设置自动下料机对塑封完成的芯片进行自动下料,减轻了工人的劳动量。
附图说明
26.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
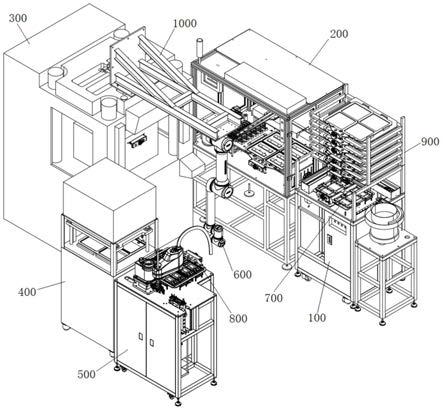
27.图1为一种mgp模封装自动化生产线的总装图;
28.图2为图1中自动料饼机的结构示意图;
29.图3为图2去掉料饼架的结构示意图;
30.图4为图3的a部放大图;
31.图5为图1中自动排片机的结构示意图;
32.图6为图1中包封机的结构示意图;
33.图7为图6中自动清模机构的示意图;
34.图8为图7的部分爆炸图;
35.图9为图1中自动下料机的结构示意图;
36.图10为图9中料架放置区与芯片架相配合的放大图;
37.图11为图9的b部放大图;
38.图12为图1中六轴机械臂的结构示意图;
39.图13为一种料饼架的结构示意图;
40.图14为一种芯片架的结构示意图;
41.图15为图14中芯片架的一种使用状态示意图;
42.图中:
43.自动料饼机100;振动盘装置101;振动盘安装架101.1;振动盘101.2;料饼机102;料饼机机架102.1;料饼机工位102.2;纵向导轨机构102.3;纵向导轨102.4;横向导轨机构102.5;导向条102.51;料饼机械手102.6;机械手架102.61;滑动配合部102.62;机械手安装部102.63;料饼架放置座102.7;机械手机构102.8;机械手气缸102.81;料饼抓取部102.82;
44.自动排片机200;排片机机架201;排片机工位202;上料模组203;芯片架工位204;
45.包封机300;包封机本体301;工作台302;立柱303;
46.冲胶机400;
47.自动下料机500;下料机本体501;下料机工位502;四轴机械手503;机械手安装座503.1;机械手基体503.2;机械手固定部503.21;第一旋转臂503.22;第二旋转臂503.23;芯片抓手503.3;安装杆503.31;抓手座503.32;抓手503.33;料架放置区504;组块504.1;底板504.11;第一托板504.12;第二托板504.13;放置架504.14;框架抬起气缸504.15;芯片放置处506;芯片放置架506.1;
48.六轴机械臂600;第一关节601;框架配合部601.1;第二关节602;第三关节603;第四关节604;机械臂安装座605;
49.料饼架700;料饼架本体701;结构孔701.1;投放架安装部702;料饼投放板703;料
饼投放孔703.1;料饼挡板组件704;挡板连接杆704.1;挡板704.2;气缸座704.3;挡板气缸704.4;第一机械臂配合组件705;组件连接板705.1;竖板705.2;机械臂配合部连接板705.3;第一机械臂配合部705.4;
50.芯片架800;芯片架本体801;芯片配合部802;芯片搁置架803;芯片搁置条804;第二机械臂配合组件805;连接横板805.1;连接竖板805.2;第二机械臂配合部805.3;
51.配料架存放框900;
52.机械臂安装架1000;
53.自动清模机构1100;移动滑轨1101;毛刷组件1102;连接板1102.1;连接座1102.2;伸缩杆件1102.3;直杆1102.31;滑动件1102.32;上模毛刷组件1102.4;上模毛刷组件安装座1102.41;上模毛刷配合部1102.42;上模毛刷组件连接部1102.43;上模毛刷1102.44;气缸连接座1102.45;上模毛刷电机组件1102.46;上模毛刷框1102.47;下模毛刷组件1102.5;抬起气缸1102.6;立柱配合部1103。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.请参阅图1
‑
15,本发明提供一种技术方案:一种mgp模封装自动化生产线,它包括自动料饼机100、自动排片机200、包封机300、冲胶机400、自动下料机500、六轴机械臂600、料饼架700以及芯片架800;
56.所述自动料饼机100上设置有配料架存放框900;
57.所述六轴机械臂600与包封机300之间设置有机械臂安装架1000,所述机械臂安装架1000一端固定于包封机300上,所述六轴机械臂600连接于机械臂安装架1000上,述料饼架700能够与六轴机械臂600配合并相接,所述芯片架800能够与六轴机械臂600配合并相接;
58.所述自动料饼机100包括振动盘装置101,所述振动盘装置101的输出侧设置有料饼机102;所述振动盘装置101包括振动盘安装架101.1,所述振动盘安装架101.1上安装有振动盘101.2,所述料饼机102包括料饼机机架102.1,所述料饼机机架102.1顶部为料饼机工位102.2,所述料饼机工位102.2上设置有纵向导轨机构102.3,所述料饼机工位102.2上还设置有纵向导轨102.4,所述纵向导轨机构102.3与纵向导轨102.4均处于料饼机工位102.2的边缘位置,所述纵向导轨机构102.3与纵向导轨102.4上滑动设置有横向导轨机构102.5,所述横向导轨机构102.5上设置有料饼机械手102.6;
59.所述料饼机工位102.2上还设置有两排料饼架放置座102.7,两排料饼架放置座102.7上能够放置料饼架700;
60.所述横向导轨机构102.5上设置有导向条102.51,所述料饼机械手102.6滑动配合于导向条102.51上;
61.所述料饼机械手102.6包括机械手架102.61,所述机械手架102.61分为滑动配合部102.62和机械手安装部102.63,所述滑动配合部102.62滑动配合于导向条102.51上,所
述机械手安装部102.63上连接有机械手机构102.8;
62.所述机械手机构102.8包括机械手气缸102.81,所述机械手气缸102.81固定于机械手安装部102.63上,所述机械手气缸102.81的活塞杆端连接有料饼抓取部102.82;
63.所述料饼机械手102.6在横向导轨机构102.5内通过电机驱动;
64.所述纵向导轨机构102.3与横向导轨机构102.5之间通过链条机构配合驱动;
65.所述纵向导轨机构102.3与纵向导轨102.4在料饼机工位102.2上相平行;
66.所述自动排片机200包括排片机机架201,所述排片机机架201上设置有排片机工位202,所述排片机工位202上设置有上料模组203,所述排片机工位202上上料模组203的一侧设置有芯片架工位204;
67.所述包封机300包括包封机本体301,所述包封机300的工位处于包封机本体301的中部,所述包封机300的工位上设置有工作台302,所述包封机300的工位四角处各向上垂直设置有立柱303,所述立柱303上设置有自动清模机构1100;
68.所述自动清模机构1100包括互相平行布置的移动滑轨1101,所述移动滑轨1101上设置有四个立柱配合部1103,所述立柱303与自动清模机构1100滑动配合,两根移动滑轨1101之间设置有毛刷组件1102,所述毛刷组件1102通过链条驱动能够在移动滑轨1101上滑动;
69.所述毛刷组件1102包括两块连接板1102.1,两块连接板1102.1外部与移动滑轨1101滑动配合,两块连接板1102.1内部设置有多个连接座1102.2,相对的两个连接座1102.2之间连接有伸缩杆件1102.3,所述伸缩杆件1102.3上由上而下依次设置有上模毛刷组件1102.4和下模毛刷组件1102.5,所述上模毛刷组件1102.4与下模毛刷组件1102.5的两端均设置有抬起气缸1102.6;
70.所述伸缩杆件1102.3包括直杆1102.31,所述直杆1102.31上套设有上下两个滑动件1102.32,上方的滑动件1102.32与上模毛刷组件1102.4连接,下方的滑动件1102.32与下模毛刷组件1102.5连接;
71.所述上模毛刷组件1102.4包括两个上模毛刷组件安装座1102.41,所述上模毛刷组件安装座1102.41分为上模毛刷配合部1102.42和上模毛刷组件连接部1102.43,两个上模毛刷配合部1102.42之间连接有上模毛刷框1102.47,所述上模毛刷框1102.47内设置有上模毛刷1102.44,两个上模毛刷组件连接部1102.43分别与对应的滑动件1102.32固定连接,两个上模毛刷组件连接部1102.43上分别设置有气缸连接座1102.45,两个气缸连接座1102.45分别与对应的抬起气缸1102.6活塞杆相连接,任一上模毛刷组件安装座1102.41的上模毛刷配合部1102.42上设置有上模毛刷电机组件1102.46,所述上模毛刷电机组件1102.46与上模毛刷1102.44之间通过皮带相配合;
72.所述下模毛刷组件1102.5与上模毛刷组件1102.4的结构相同;
73.所述自动下料机500包括下料机本体501,所述下料机本体501顶部为下料机工位502,所述下料机工位502上分别设置有四轴机械手503、料架放置区504以及芯片放置处506;
74.所述料架放置区504为四个相同的组块504.1构成,所述组块504.1包括底板504.11,所述底板504.11的两侧均设置有多个第一托板504.12,所述底板504.11的中部设置有多个第二托板504.13,所述料架放置区504的周围设置有放置架504.14,所述料架放置
区504的周围还设置有多个框架抬起气缸504.15;
75.所述四轴机械手503包括机械手安装座503.1,所述机械手安装座503.1固定于下料机工位502上,所述机械手安装座503.1上安装有机械手基体503.2,所述机械手基体503.2上安装有芯片抓手503.3;
76.所述机械手基体503.2包括机械手固定部503.21,所述机械手固定部503.21上转动连接有第一旋转臂503.22,所述第一旋转臂503.22上转动连接有第二旋转臂503.23,所述芯片抓手503.3安装于第二旋转臂503.23上;
77.所述芯片抓手503.3包括安装杆503.31,所述安装杆503.31连接在第二旋转臂503.23上,所述安装杆503.31的末端连接有抓手座503.32,所述抓手座503.32上连接有两个抓手503.33;
78.所述芯片放置处506上设置有芯片放置架506.1,所述芯片放置架506.1上放置芯片;
79.所述六轴机械臂600包括第一关节601、第二关节602、第三关节603、第四关节604以及机械臂安装座605,所述第一关节601末端设置有框架配合部601.1,所述框架配合部601.1能够与料饼架700或芯片架800配合连接,所述第一关节601转动连接于第二关节602上,所述第二关节602转动连接于第三关节603上,所述第三关节603转动连接于第四关节604上,所述第四关节604转动连接于机械臂安装座605上,所述机械臂安装座605固定连接于机械臂安装架1000上;
80.所述料饼架700包括料饼架本体701,所述料饼架本体701外部轮廓为矩形结构,所述料饼架本体701沿着中线对称挖设有两个投放架安装部702,所述投放架安装部702上间隔连接有多个料饼投放板703,每个料饼投放板703顶部间隔开设有多个料饼投放孔703.1,多个料饼投放板703的底部设置有料饼挡板组件704,所述料饼架本体701上设置有第一机械臂配合组件705,所述第一机械臂配合组件705能够与框架配合部601.1相配合连接;
81.所述料饼投放板703为向下的“u”形结构;
82.所述料饼挡板组件704包括挡板连接杆704.1,所述挡板连接杆704.1上间隔连接有多个挡板704.2,所述挡板704.2为“l”形结构,多个挡板704.2能够挡住料饼投放板703底部的空缺,最末端的挡板704.2中部连接有气缸座704.3,所述气缸座704.3上安装有挡板气缸704.4;
83.所述第一机械臂配合组件705包括组件连接板705.1,所述组件连接板705.1连接于料饼架本体701上,所述组件连接板705.1上连接有两块竖板705.2,两块竖板705.2上连接有机械臂配合部连接板705.3,所述机械臂配合部连接板705.3上连接有第一机械臂配合部705.4,所述第一机械臂配合部705.4能够与框架配合部601.1相配合连接;
84.所述料饼架本体701的中部挖设有结构孔701.1;
85.所述料饼投放板703与料饼架本体701通过螺栓连接在一起;
86.所述芯片架800包括芯片架本体801,所述芯片架本体801上设置有四个的芯片配合部802,所述芯片配合部802为镂空结构,所述芯片配合部802上设置有芯片搁置架803,所述芯片配合部802的边缘还设置有多个芯片搁置条804,所述芯片架本体801的一侧设置有第二机械臂配合组件805,所述第二机械臂配合组件805能够与框架配合部601.1相配合连接;
87.所述第二机械臂配合组件805包括连接横板805.1,所述连接横板805.1上设置有连接竖板805.2,所述连接竖板805.2上连接有第二机械臂配合部805.3,所述第二机械臂配合部805.3能够与框架配合部601.1相配合连接;
88.所述芯片架800根据所加工的产品型号的不同需要单个使用或两个叠加使用;
89.工作原理:
90.首先在振动盘101.2内装入料饼,启动振动盘101.2,振动盘101.2通过振动将料饼有序运送至出口处,料饼机102上的料饼机械手102.6会抓取振动盘101.2出口处的料饼并将其有序放入料饼架700上的多个料饼投放孔703.1内,待六轴机械臂600将料饼架700投放至包封机300内;芯片在自动排片机200上排片完成后放在芯片架800上;六轴机械臂600先将装有芯片的芯片架800放入包封机,接着将装有料饼的料饼架700放入包封机300内芯片架800的正上方,料饼融化后会封装在其下方的芯片上,完成封装后,料饼架700被六轴机械臂600放回自动料饼机100的工位,芯片架800被六轴机械臂600放到冲胶机400的工位上进行冲胶,冲胶完成后六轴机械臂600将芯片架800放至自动下料机500的工位上,将芯片留在工位上,接着四轴机械手503将芯片依次堆放在芯片放置架506.1上,然后芯片架800被六轴机械臂600放回配料架存放框900或自动排片机200的工位上;
91.当料饼放入料饼架700时,料饼架700上的挡板气缸704.4的活塞杆伸出,料饼挡板组件704上的挡板704.2紧紧贴合在料饼投放板703上,使得料饼暂时被存放在料饼架700上;当芯片架800与料饼架700都被放入包封机300内时,料饼架700上的挡板气缸704.4的活塞杆收缩,此时料饼掉入芯片架800上对芯片进行塑封;
92.当芯片架800上的芯片完成冲胶后进入自动下料机500,芯片架800被六轴机械臂600放到自动下料机500上时,框架抬起气缸504.15的活塞杆处于顶出的状态,芯片架800在自动下料机500上放稳后,框架抬起气缸504.15的活塞杆收缩,使芯片与第一托板504.12、第二托板504.13接触,然后四轴机械手503将芯片架800上塑封好的芯片依次放置于芯片放置处506。
93.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1