高密度、受控的集成电路工厂的制作方法
高密度、受控的集成电路工厂
相关申请
1.本技术要求申请日为2019年4月18日的美国临时申请no.62/835,984的优先权和权益,出于所有目的通过引用将该美国临时申请no.62/835,98特此并入本文。
技术领域
2.本公开涉及集成电路(ic)处理。更具体地,本公开涉及将ic处理室集成到尽可能密集并控制环境的工厂中。
背景技术:
3.当前的ic制造平台被设计为供人类操作用于形成半导体器件的工具(例如,处理室)。当前的设计导致工厂空间浪费,因为半导体晶片经常在大气和真空之间转移。目前,架空空间仅用于工具前面,系统之间提供走廊以移动大型系统。
4.当前的工厂在系统之间在大气或n2中转移晶片。系统本身通常在真空中运行。一些系统,例如湿式清洁系统,在大气或n2中运行。因此,晶片经常在大气和真空之间转移,这耗费时间、能量和空间。
5.因此,随着ic处理已经发展为具有更少的人机交互,期望具有高效的工厂设计,并且尽可能少地浪费空间。
技术实现要素:
6.根据一个实施方案,提供了一种集成电路制造工厂。该工厂包括多个用于处理集成电路的处理模块,处理模块位于工厂的地面或者工厂地面的未占用空间。该多个处理模块占据工厂一半以上的地面,并且未占用空间小于工厂地面的一半。
7.根据另一实施方案,提供了一种集成电路制造工厂。该工厂包括多个用于处理集成电路的处理模块和工厂地面的未占用空间。多个处理模块位于工厂的地面上,并且未占用空间包括位于工厂地面上的多个服务区和位于工厂地面上的多个装载区。
附图说明
8.本公开通过示例的方式,而非限制的方式,在附图中示出,其中相似的参考标记指代类似的元件,并且其中:
9.图1a是一个典型ic制造工厂的示例的示意性俯视图;
10.图1b示出了图1a中所示的ic制造工厂中的典型处理工具;
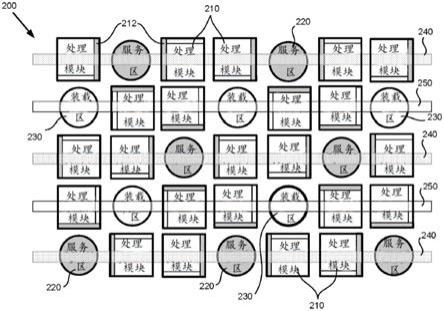
11.图2a是根据一个实施方案的高效ic制造工厂的清洁室水平面的示意性俯视图;
12.图2b更详细地示出了示例性服务区;
13.图2c更详细地示出了示例性装载区;
14.图3a是可移动真空转移模块的一个实施方案的横截面图;
15.图3b是可移动真空转移模块的另一个实施方案的横截面图;
16.图3c是可移动真空转移模块的一个实施方案的俯视图;
17.图4是工厂的底层地面水平面的一个实施方案的示意性俯视图;
18.图5是工厂的一个实施方案的横截面图。
具体实施方式
19.现在将参考附图中所示的本公开的几个优选实施方案来详细描述本公开。在以下描述中,阐述了许多具体细节以提供对本公开的透彻理解。然而,对于本领域技术人员来说显而易见的是,可以在没有这些具体细节中的一些或全部的情况下实践本公开。在其他情况下,为了避免不必要地混淆本公开,没有详细描述众所周知的处理步骤和/或结构。
20.图1a是典型ic制造工厂100的示例的示意性俯视图。如图1a所示,当前的ic工厂是为人类在工厂中操作处理工具110而设计的。典型的处理工具110在图1b中示出,并且可以包括真空转移模块(vtm)、封闭式前端模块(efem)和处理模块,该处理模块用于执行半导体处理步骤,例如化学机械平坦化、薄膜沉积(例如物理气相沉积(pvd)、化学气相沉积(cvd)、电沉积)、抛光、蚀刻、图案化或光刻、光刻胶旋涂、离子注入、扩散和用于电介质膜生长的氧化。如图1b所示,处理工具110包括efem 112,该efem 112是用于将晶片从大气转移到真空的转移模块;以及vtm 114,该vtm 114是用于在真空和处理室116之间转移晶片的转移模块。
21.典型的ic工厂在处理工具110之间设有走廊,以提供空间以在必要时将处理工具110带出。如图1a所示,有大量浪费的地面空间专门用于处理工具110之间的走廊,包括提供用于服务处理工具110的空间的服务区120和供操作员操作处理工具110以及将晶片移入和移出处理室的装载和工具操作员区域130。因此,在当前的ic制造工厂中存在大量未被处理工具110占用的地面空间。在下面描述的ic工厂的实施方案中,未占用地面空间更少,并且占用地面空间的单独的vtm和efem也是不必要的。
22.图2a是根据一个实施方案的高效ic制造工厂200的清洁室水平面的示意性俯视图。在这里描述的实施方案中,超过一半的工厂地面空间被ic处理模块210占用,而小于一半的工厂地面空间未被ic处理模块210占用。如图2a所示,大约三分之二的工厂地面空间被ic处理模块210占用,并且大约三分之一的工厂地面空间未被占用以允许用于服务处理模块210并用于将晶片装载到ic处理模块210和从ic处理模块210卸载晶片的空间。未占用的地面空间包括服务区220(用于处理模块210的服务)和装载区230(用于向处理模块210装载晶片和从处理模块210卸载晶片)。
23.如图2a所示,服务区220和装载区230位于每个处理模块的不同侧。可以提供一个服务区220来服务一个以上的处理模块210。在图2a所示的实施方案中,每个服务区220被提供用于服务至少两个处理模块210。一些服务区220可以服务多达四个处理模块210。类似地,可以提供一个装载区230,用于向一个以上处理模块210装载晶片和从一个以上处理模块210卸载晶片。在图2a所示的实施方案中,每个装载区230被提供用于向至少两个处理模块210装载晶片和从至少两个处理模块210卸载晶片。一些装载区230可以用于向多达四个处理模块210装载晶片和从多达四个不同的处理模块210卸载晶片。
24.如图2a所示,工厂200还设有架空线240、250以允许通过处理模块210跨工厂转移物品。根据一些实施方案,架空线240、250设有轨道,以允许架空转移系统转移物品,例如服
务物品(例如,备件),或可移动真空转移模块(mvtm)300(图3a
‑
3c),以沿着处理模块210上方的轨道移动。服务物品可以沿着架空线240运输到需要服务的特定处理模块210。类似地,如下面更详细描述的,mvtm 300也可以沿着架空线250运输以与特定的处理模块210对接以从处理模块210卸载晶片并将晶片在mvtm 300的受控真空环境内转移到另一个处理模块210。根据其他实施方案,架空线240、250没有轨道,而是提供路径,类似无人机的设备可以沿着该路径飞行以运输服务物品和mvtm 300。
25.如上所述,架空线240允许架空转移可能需要用于服务处理模块的服务物品(例如备件),并且架空线250允许跨工厂200架空转移mvtm 300。图3a
‑
3c更详细地示出了mvtm 300。
26.mvtm 300是紧凑的可移动前开口通用吊舱(foup),其允许在受控真空环境350中转移晶片380,这减少了在真空和大气之间转移晶片所耗费的时间量。mvtm 300将允许晶片在处理模块210之间转移的同时保持在真空中。根据一个实施方案,mvtm 300被配置为维持真空在1e
‑
4托至少20分钟。
27.mvtm 300可以沿着架空线250运输以到达用于与mvtm 300对接的特定处理模块210的装载区230。如图3c所示,mvtm 300包括内置晶片处理机,例如选择性柔顺组装机械臂或选择性柔顺关节机械臂(s.cara)机器人310,用于将晶片装载到处理模块210中并从处理模块210中卸载晶片。
28.根据该实施方案,mvtm 300直接对接至独立的处理模块210。mvtm 300具有用于与工厂中的其他工具(包括该处理模块210)连接的标准化电气和通信接口。mvtm 300还具有标准化和自动化的主门和低真空泵连接以与处理模块210连接。电气和通信接口、晶片处理机310和mvtm 300的其他功能由集成控制器330控制。在一些实施方案中,控制器330可以管理mvtm 300内的温度。虽然在图3a中没有示出控制器330,将理解图3a的实施方案也可以具有这样的控制器。
29.mvtm 300还具有晶片夹具,用于在运输期间将晶片保持在正确位置。晶片夹具可以采用例如真空、静电、机械和磁等夹持技术。在运输期间,晶片夹具将晶片380保持在mvtm 300内的位置,直至达到mvtm300的最大允许加速度。图3a示出了根据一个实施方案的磁驱动晶片夹具340,且图3b示出了根据另一个实施方案的静电卡盘(esc)344。
30.在图3a所示的实施方案中,每个磁驱动晶片夹具340由升降机341控制,升降机341由具有磁线性轴承的磁耦合驱动器342驱动。在图3b所示的实施方案中,esc 344由升降销驱动器346驱动。
31.在一些实施方案中,如图3a所示,mvtm 300可以设有独立的电池组320,该电池组可以操作mvtm 300以用于例如紧急晶片卸载的目的。在mvtm 300是类似无人机的设备的实施方案中,电池组320可以为mvtm300的所有功能供电。在mvtm 300沿着架空线250的轨道移动的实施方案中,mvtm 300可以由架空线250通过标准化电气接口供电。
32.在一些实施方案中,如图3a所示,mvtm 300还可设有计量工具348。尽管图3b中未示出计量工具348,将理解图3b所示的实施方案也可设有计量工具。在一些实施方案中,mvtm 300还设有rf id标签,从而可以在工厂200中跟踪其在工厂200中的位置。在图3a所示的实施方案中还提供了非蒸发吸气泵390。
33.具有上述布局的工厂200具有最密集的可能布局,其中在一个地点(装载区230)将
晶片装载到处理模块210中和从处理模块210卸载晶片,在第二地点(服务区220)服务处理模块210、从处理模块210上方运输mvtm 300和服务物品,并从下面的底层地面水平面提升服务升降机510(图5)。每个处理模块210从一侧被装载和卸载并且从另一侧被服务。
34.根据所示实施方案,除了工厂200边缘上的服务区220之外,每个服务区220具有围绕其定位的四个处理模块210。图2b更详细地示出了示例性服务区220。如图2b所示,四个处理模块210围绕服务区220定向和定位,使得处理模块210的允许服务/维护的服务侧212面向服务区220。因此,每个处理模块210可以从相邻的服务区220接受服务。图2b示出了两个额外的处理模块210;然而,这两个处理模块210由图2b中未示出的不同服务区提供服务。如图2b所示,这两个处理模块210具有不面向图2b中所示的服务区220的服务侧212。
35.每个处理模块210具有服务侧212和装载侧214。如所示的实施方案中所示,服务侧212定位在与装载侧214成90度的一侧。服务侧212设置在处理模块210以允许处理模块210的维护和服务。装载侧214设置有标准化开口,该标准化开口配置为与mvtm 300的标准化开口连接,mvtm300配置为与装载侧214对接。
36.类似地,在所示的实施方案中,除了工厂200边缘上的装载区230之外,每个装载区230具有围绕其定位的四个处理模块210。处理模块210围绕装载区230定向和定位,使得处理模块210的允许装载和卸载晶片的一侧面向装载区230。例如,mvtm 300可以沿架空线250运输并下降到处理模块前面的装载区230中,从该处理模块其将卸载晶片。
37.图2c更详细地示出了示例性装载区230。如图2c所示,四个处理模块210围绕装载区230定向和定位,使得处理模块210的允许装载和卸载晶片的装载侧214面向装载区230。因此,每个处理模块210可以具有从相邻的装载区230装载或卸载的晶片。图2c示出了两个额外的处理模块210;然而,这两个处理模块210的晶片在图2c中未示出的不同的装载区中装载和卸载。如图2c所示,这两个处理模块210具有不面向图2c所示的装载区230的装载侧214。
38.图4是工厂200的底层地面水平面400的一个实施方案的示意性俯视图。应当理解,图4中所示的底层地面水平面400低于图2a中所示的水平面。远程模块,例如冷却器和rf发生器,可以位于处理模块210下方的底层地面水平面400上的对角远程模块条410中。如图4所示,对角远程模块条410定位成其间具有支巷的条带。应当理解,图2a的水平面的布局在图4中示出以显示远程模块相对于处理模块210、服务区220和装载区230的定位。
39.如图4所示,对角远程模块条410之间的支巷位于服务区220和装载区230下方以允许服务升降机510(图5)沿着支巷行进到达服务区220。即,服务升降机510可以沿着底层地面水平面上的对角远程模块条410之间的支巷行进,然后被提升以服务清洁室水平面上处理模块210。
40.图5是工厂200的一个实施方案的横截面图,既示出了图2a的清洁室水平面也示出了图4的底层地面水平面。如图5所示,服务升降机510已经从底层地面水平面被提升到清洁室水平面以允许技术人员服务处理模块210。如图5所示,在底层地板水平面和清洁室水平面之间的服务区220没有地面,以允许梯子或服务升降机510从底层地面水平面上升到清洁室水平面以服务处理模块210。仍如图5所示,服务物品520(例如处理模块210的备件)可以通过架空线240跨工厂200运输到需要使用该备件进行服务的处理模块210。
41.这里描述的工厂200布局具有尽可能密集的布局,其中所浪费的空间尽可能少。由
于不需要单独的vtm和efem,这里描述的布局的益处包括使用尽可能密集的布局降低成本。由于减少了抽气和排气,真空和大气之间晶片转移的消除避免了氧化和颗粒性能,因此性能也得到了提高。
42.虽然仅详细描述了本发明的几个实施方案,但是应当理解,在不脱离本发明的精神或范围的情况下,可以以许多其他形式实施本发明。鉴于上述所有内容,显然这些实施方案是说明性的而非限制性的,并且本发明不限于在此给出的细节,而是可以在所附权利要求的范围和等价物内进行修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1