一种大电流快速机械开关结构及其控制方法与流程
1.本发明涉及柔性直流配电技术领域,具体是指一种大电流快速机械开关结构及其控制方法。
背景技术:
2.随着分布式能源和储能装置的大规模接入、电力电子技术以及大容量电力传输的快速发展,以柔性直流系统为基础的配电是未来重要的发展方向,特别是某些特定场合,如大型船舶供电系统、城市轨道交通供电系统等直流系统得到了长足发展。在大容量直流电网中,需要应用2
‑
3ms内开断超大电流的直流断路器来快速切除故障设备或线路,以保证直流系统非故障部分的稳定运行。
3.基于混合型式的直流真空断路器是目前直流开断技术的重要发展方向,该类型断路器将机械开关通态损耗低和电力电子开关开断速度快的优点充分结合。电力电子开关关断故障电流时间极短,电流变化率di/dt非常大,由于线路中电感的存在,关断瞬间分闸间隙需要有承受高幅值瞬态恢复电压的开距,故其机械开关分闸速度的快慢直接决定了混合式直流断路器的开断性能,因此,快速机械开关是发展混合式直流断路器的关键技术。
4.随着中压直流配网系统迈向大容量电力传输时代,混合式直流断路器将承载更大的直流电流,也就意味着作为主通流支路的快速机械开关在电网稳态时需要通以更大的额定电流,在电网故障时快速机械开关需要转移更大的故障电流并且承受更高幅值瞬时恢复电压,因此,此类型的大电流快速机械开关在特性上要求稳定合闸时机构对触头的压力非常大,分闸时速度非常快,由于中压配网所用大电流真空灭弧室触头开距小且运动部件质量大,故在短行程中克服强阻力对大质量运动部件进行加速和减速非常困难。
5.为保证大电流快速机械开关合闸位置时触头间有足够的压力,目前普遍采用永磁操作机构,它使用永磁体取代了传统的锁扣装置实现了真空开关分闸和合闸位置的保持,永磁操作机构运动部件简单、分合闸电流较小,对操作电源要求相对简单,但就目前技术发展下,永磁操作机构没有办法在分合闸初期速度快速提升。同时,为保证分闸速度足够快,目前电磁斥力机构得以广泛应用,通过电磁涡流效应,放电线圈与斥力板之间产生快速反向磁场,电磁斥力推动斥力板快速运动,放电线圈电流上升梯度越大,斥力板所受斥力增加越快,故电磁斥力机构引其动作零件少、体积小并且加速快广泛用于混合式直流断路器快速机械开关中。
6.因此,目前大容量中压直流配电网中使用的大电流快速机械开关中的机构多为电磁斥力与永磁操作联合机构,即采用永磁操作机构用作合闸和分闸保持,并永磁操作机构中设计有电磁铁线圈,其机构还会兼具慢分和慢合的功能;同时,采用电磁斥力机构用作故障快速分闸或者合闸缓冲作用,若电磁斥力机构为双驱动线圈,其机构还会兼具分闸缓冲以及快速合闸作用。很明显,电磁斥力与永磁操作联合机构在大电流快速机械开关的应用中优势非常明显,但是目前的联合机构控制方式单一,故障分闸时仅投入电磁斥力机构。由于电磁斥力机构能在1ms内快速达到推力峰值,持续时间非常短,导致电磁斥力机构快速分
闸时,斥力盘带动连杆向下移动,此时永磁体仍然提供合闸保持力,分弹簧会因压缩而产生反向作用力,因而会降低快速机械开关的分闸速度,增加分闸时间,若要提升分闸速度,则需要提升电磁斥力机构驱动电容电压,这将会增加驱动电容体积,给驱动电路设计带来巨大的压力,同时会造成电磁斥力机构与合闸保持机构的弹性碰撞,造成弹跳现象,严重情况下甚至导致分闸失败。并且由于在中压配网系统中,真空灭弧室额定开距较小,快速分闸时,该装置基本无法对运动部件进行有效缓冲,导致分闸反弹现象的发生。
技术实现要素:
7.为了克服上述缺点,本发明的目的是提供一种基于电磁斥力与永磁操作联合机构的大电流快速机械开关的控制方法,该控制方法可以解决联合机构分闸速度降低以及电磁斥力机构与永磁操作机构的弹性碰撞问题,而且可以大大降低驱动电容电压,减小驱动电容体积。
8.本发明第一方面,提供一种大电流快速机械开关结构,包括真空灭弧室、单稳态永磁操作机构和双线圈电磁斥力机构。
9.作为优选,所述真空灭弧室包括静触头和动触头。
10.作为优选,所述单稳态永磁操作机构包括带凸台的运动导杆、分闸弹簧、触头弹簧、永磁体、静铁芯、慢速分合闸线圈、动铁芯和动铁芯分闸限位板;所述运动导杆穿过静铁芯的空心部分,所述静铁芯通过绝缘环型槽内置慢速分合闸线圈,所述永磁体位于绝缘环型槽上方,所述分闸弹簧和触头弹簧放置在静铁芯的空心部分并分别穿入运动导杆的上下两侧,所述静铁芯位于动铁芯下方。其主要作用是合闸状态时为触头提供足够的触头压力,分闸时其吸合线圈反向通电抵消永磁力。
11.作为优选,所述双线圈电磁斥力机构包括斥力盘、分闸线圈和分闸缓冲线圈;所述斥力盘上方连接处穿过分闸线圈的中空部位,所述斥力盘下方连接处穿过分闸缓冲线圈的中空部位。其主要功能是利用电磁斥力分闸线圈放电在斥力盘中产生相下的感应力推动运动部件快速运动,利用分闸缓冲线圈在斥力盘中产生相上的感应力对运动部件进行精准减速。
12.作为优选,真空灭弧室的动触头与金属拉杆连接,金属拉杆的另一端连接至单稳态永磁操作机构的运动导杆,运动导杆的另一端连接至双线圈电磁斥力机构的斥力盘。
13.本发明第二部分,提供上述大电流快速机械开关结构的控制方法,包括以下控制环节:
14.①
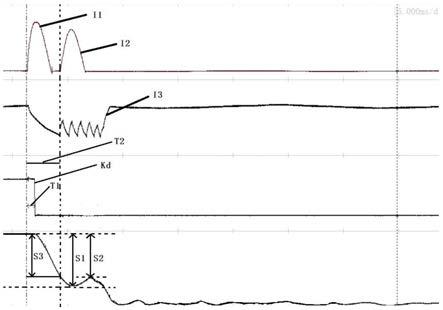
i1为双线圈电磁斥力机构分闸线圈放电电流,i2为双线圈电磁斥力机构分闸缓冲线圈放电电流;i3为永磁操作机构吸合线圈反向通电电流;
15.②
kd为动静触头分断标识线,高电位为合位,低电位为分位;
16.③
t1为分闸命令发出到动静触头分离的时间,即分闸时间;t2为分闸缓冲线圈放电与分闸线圈放电延迟时间,此处为3ms;
17.④
s1为运动部件第一次加速到的直线位移最大点;s2为运动部件第一次反弹后的直线位移最大点;s3为3ms时触头之间的开距。
18.本发明的有益效果为:
19.分闸时采用电磁斥力机构分闸线圈和永磁操作机构操作线圈同时动作的方法,尽
可能的减小分闸时永磁体提供的合闸保持力,缩短分闸时间,减少触头弹簧因分闸时快速压缩而产生反向作用力,减轻电磁斥力机构与合闸保持机构的弹性碰撞,提高分闸过程中的稳定性。
附图说明
20.附图1为本发明一种基于电磁斥力与永磁操作联合机构的大电流快速机械开关合闸情况下的结构示意图;
21.附图2为分闸时仅作用电磁斥力机构分闸线圈情况下的运动特性曲线;
22.图3为分闸时电磁斥力机构与永磁操作机构分闸线圈联合作用情况下的运动特性曲线;
23.图中所示:
24.1、静触头,2、动触头,3、金属拉杆,4、运动导杆,5、分闸弹簧,6、触头弹簧,7、永磁体,8、静铁芯,9、慢速分合闸线圈,10、动铁芯,11、动铁芯分闸限位板,12、斥力盘,13、分闸线圈,14、分闸缓冲线圈。
具体实施方式
25.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
26.一种大电流快速机械开关结构,如图1所示,包括真空灭弧室、单稳态永磁操作机构和双线圈电磁斥力机构。所述真空灭弧室包括静触头1和动触头2。
27.所述单稳态永磁操作机构包括带凸台的运动导杆4、分闸弹簧5、触头弹簧6、永磁体7、静铁芯8、慢速分合闸线圈9、动铁芯10和动铁芯分闸限位板11。所述运动导杆4穿过静铁芯8的空心部分,所述静铁芯8通过绝缘环型槽内置慢速分合闸线圈9,所述永磁体7位于绝缘环型槽上方,所述分闸弹簧5和触头弹簧6放置在静铁芯8的空心部分并分别穿入运动导杆4的上下两侧,所述静铁芯8位于动铁芯10下方。其主要作用是合闸状态时为触头提供足够的触头压力,分闸时其吸合线圈反向通电抵消永磁力。
28.所述双线圈电磁斥力机构包括斥力盘12、分闸线圈13和分闸缓冲线圈 14。所述斥力盘12上方连接处穿过分闸线圈13的中空部位,所述斥力盘12 下方连接处穿过分闸缓冲线圈14的中空部位。其主要功能是利用电磁斥力分闸线圈放电在斥力盘中产生相下的感应力推动运动部件快速运动,利用分闸缓冲线圈在斥力盘中产生相上的感应力对运动部件进行精准减速。
29.真空灭弧室的动触头2与金属拉杆3连接,金属拉杆3的另一端连接至单稳态永磁操作机构的运动导杆4,运动导杆4的另一端连接至双线圈电磁斥力机构的斥力盘12。
30.一种基于电磁斥力与永磁操作联合机构的10kv大电流快速机械开关的控制方法,如图3所示,i1为双线圈电磁斥力机构分闸线圈放电电流,i2为双线圈电磁斥力机构分闸缓冲线圈放电电流;i3为永磁操作机构吸合线圈反向通电电流;kd为动静触头分断标识线,高电位为合位,低电位为分位;t1 为分闸命令发出到动静触头分离的时间,即分闸时间;t2为分闸缓冲线圈放电与分闸线圈放电延迟时间,此处为3ms;s1为运动部件第一次加速到的直线位移最大点;s2为运动部件第一次反弹后的直线位移最大点;s3为3ms时触头之间的开距。
31.为了更进一步的说明本发明实施例提供的基于电磁斥力与永磁操作联合机构的大电流快速机械开关结构原理及控制方法,现结合附图详述其工作过程以及控制方法,具体如下:
32.(1)分闸开始前开关处于合闸位置,如附图1状态:灭弧室中1
‑
静触头与2
‑
动触头在一定的压力下紧闭;8
‑
动铁芯与10
‑
静铁芯在永磁吸力的作用下吸合;5
‑
分闸弹簧与6
‑
触头弹簧均处于压缩状态,触头弹簧的压紧力与分闸弹簧的压紧力的合力为触头压力,大电流真空灭弧室要求非常大的额定触头压力,以15kv
‑
5000a真空灭弧室为例,额定触头压力要求11000n;12
‑ꢀ
斥力盘的上表面与13
‑
分闸线圈浇筑下表面距离为1mm,12
‑
斥力盘下表面与 14
‑
分闸缓冲线圈浇筑上表面距离为12
±
1mm;
33.(2)分闸开始时刻仅双线圈斥力机构分闸线圈放电,如附图2曲线所示:分闸时仅斥力机构的13
‑
分闸线圈接到命令放电,分闸时间t1为1.25ms,运动部件第一次加速到的最大直线位移s1为7.8mm,运动部件第一次反弹后的直线位移s2为3.8mm,3ms时触头之间的开距s3为6.4mm,并且该控制方法下的分闸曲线出现大幅度回弹现象;
34.(3)分闸开始时刻双线圈斥力机构分闸线圈放电与单稳态永磁机构吸合线圈反向通电同时进行,如附图3所示:分闸时仅斥力机构的13
‑
分闸线圈接到命令放电,分闸时间t1为0.65ms,运动部件第一次加速到的最大直线位移s1为8.2mm,运动部件第一次反弹后的直线位移s2为7.2mm,3ms时触头之间的开距s3为7.2mm,并且该控制方法下的分闸曲线没有出现大幅度回弹现象。
35.分闸时采用电磁斥力机构分闸线圈和永磁操作机构操作线圈同时动作的方法,尽可能的减小分闸时永磁体提供的合闸保持力,缩短分闸时间,减少触头弹簧因分闸时快速压缩而产生反向作用力,减轻电磁斥力机构与合闸保持机构的弹性碰撞,提高分闸过程中的稳定性。当分闸达到规定开距后,通过动作分闸缓冲线圈使运动部件精准快速的减速,较小分闸冲击对结构的损害,而且可以大大降低驱动电容电压,减小驱动电容体积。
36.通过本发明中的分闸开始时刻双线圈斥力机构分闸线圈放电与单稳态永磁机构吸合线圈反向通电同时进行的控制方法与分闸开始时刻仅双线圈斥力机构分闸线圈放电的控制方法相比较,本发明中的控制方法由于分闸开始时刻双线圈斥力机构分闸线圈放电与单稳态永磁机构吸合线圈反向通电同时进行,吸合线圈反向通流有助于快速抵消一部分永磁力,使得触头分闸时间缩短,分闸速度更快,并且随着斥力机构分闸线圈电流快速下降而吸合线圈反向通流逐步增大,永磁力被大部分抵消,避免斥力机构分闸缓冲线圈放电时使得分闸弹簧再次过度压缩导致动触头回弹,确保分闸过程平稳快速进行。
37.当然,上述说明也并不仅限于上述举例,本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本发明的技术方案并非是对本发明的限制,参照优选的实施方式对本发明进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换都不脱离本发明的宗旨,也应属于本发明的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1