一种适用于穿舱结构的宽频段小型化天线阵列吊装机构
1.本发明属于天线阵列吊装技术领域,尤其是涉及一种适用于穿舱结构的宽频段小型化天线阵列吊装机构。
背景技术:
2.临近空间是距地面20-100km的空间区域,介于卫星和航空飞行区域之间,不仅是航天器往返外太空的必经之地,还是高超声速飞行器的飞行走廊。临近空间高速飞行器作为开发利用临近空间的重要载体,将开拓人类新的活动疆域。历史经验表明:哪个国家首先掌握进入和开拓新活动疆域的能力,就会在国际竞争中占据巨大的战略优势甚至绝对主导权。临近空间高速飞行器所具有的高速度、低高度、长航时、可重复使用等特点,使其成为灵活进出临近空间、全球快速到达、往返太空的重要运输载体,已经成为各科技大国研究的焦点。
3.飞行器高超声速飞行时,由于气动加热,温度可达到数千甚至上万摄氏度,空气分子被高温激发电离形成一层包覆在飞行器表面的“等离子鞘套”。等离子鞘套包含大量中性粒子、正离子和自由电子,其中带电粒子(主要为自由电子)会吸收、反射和散射电磁波,引发一系列电磁效应,使通信和探测信号产生畸变,导致信息系统特性发生改变,甚至产生通信“黑障”、目标探测异常等系列问题,已成为制约临近空间高速飞行器发展的瓶颈和亟待解决的世界难题。
4.由于天线在临近空间内位置的多变性,为模拟临近空间内实际电磁通信情况,需要针对不同波段及俯仰角度,因此本发明设计一种宽频段小型化天线阵列吊装结构,可实现在一定范围内天线阵列的吊装、转动、平移及摆动功能。
技术实现要素:
5.有鉴于此,本发明旨在提出一种适用于穿舱结构的宽频段小型化天线阵列吊装机构,小型化天线阵列阵列吊装通过多种机构的配合使得天线可进行转动、摆动、升降以及平移运动;利用穿舱结构,不依赖于真空腔室的强度,在保证天线阵列运动的同时也可实现天线阵列的独立吊装。
6.为达到上述目的,本发明的技术方案是这样实现的:
7.一种适用于穿舱结构的宽频段小型化天线阵列吊装机构,包括天线阵列提升机构、天线阵列穿舱机构、天线阵列平移机构和天线阵列转动机构,所述的天线阵列提升机构设置在真空舱外部,所述的天线阵列穿舱机构穿过真空舱设置,所述的天线阵列平移机构和天线阵列转动机构均设置在真空舱内部;
8.所述的天线阵列提升机构带动天线阵列实现竖直方向运动;所述的天线阵列穿舱机构安装在天线阵列提升机构上,所述的天线阵列平移机构安装在天线阵列穿舱机构上,天线阵列穿舱机构带动天线阵列实现水平方向上的移动;所述的天线阵列转动机构安装在天线阵列平移机构上,天线阵列转动机构实现天线阵列的转动。
9.进一步的,所述天线阵列提升机构包括横梁、滑轨安装板、滑轨、起吊板、电动葫芦和吊耳,在横梁的左右两侧各安装两个滑轨安装板,在每个滑轨安装板上分别安装一个竖向滑轨,在四个竖向滑轨上配合一起吊板,通过电动葫芦带动起吊板在竖向滑轨上升降运动。
10.进一步的,所述天线阵列穿舱机构包括拉杆法兰、波纹管、连接杆、穿舱盲法兰和盲法兰,拉杆法兰的上端为拉杆端,下端为法兰端,拉杆法兰设置两个,且两个拉杆法兰通过各自的拉杆端对称安装在起吊板的两侧,在每个拉杆法兰的法兰端分别连接一中空法兰段,两个中空法兰段与穿舱盲法兰连接,所述穿舱盲法兰与真空舱连接,在每个中空法兰段内穿设一连接杆,连接杆的上端固定在拉杆法兰的法兰端,下端穿过穿舱盲法兰伸入真空舱内,在中空法兰段上套设波纹管,在穿舱盲法兰上设有若干盲法兰。
11.进一步的,所述天线阵列平移机构包括安装底板、左侧板、右侧板、导轨、丝杠、第一联轴器、第一真空步进电机和天线安装转接组件,两个连接杆的下端均与安装底板连接;
12.在安装底板的前后两侧分别安装左侧板和右侧板,在右侧板和左侧板之间支撑丝杠,所述的丝杠通过联轴器与真空步进电机连接,所述真空步进电机通过安装在安装底板上的电机安装板支撑,在丝杠上设置若干天线安装转接组件,且在安装底板上安装有导向天线安装转接组件直线运动的导轨,在每个天线安装转接组件上安装一天线阵列转动机构。
13.进一步的,所述天线阵列转动机构包括第二真空步进电机、第二联轴器、电机安装座、外套管、竖直传动轴、安装架、第一锥齿轮、第二锥齿轮、天线连接板和水平转轴,所述的第二真空步进电机安装在电机安装座上,电机安装座的上端与对应的天线安装转接组件连接,电机安装座的下端与外套管的上端连接,外套管的下端与安装架连接,所述的竖直传动轴设置在电机安装座和外套管内,竖直传动轴的上端通过第二联轴器与第二真空步进电机连接,下端连接第一锥齿轮,所述的第一锥齿轮与第二锥齿轮啮合,第二锥齿轮安装在水平转轴上,所述的水平转轴穿设支撑在安装架内,在水平转轴上安装天线连接板。
14.进一步的,在天线阵列平移机构上设有平移位移检测组件,在天线阵列转动机构上设有转动角度检测组件。
15.进一步的,所述平移位移检测组件包括接近开关、接近开关感应板、直线光栅尺和直线光栅读数头,所述直线光栅尺安装在天线阵列平移机构的安装底板上,所述直线光栅读数头通过内六角螺钉安装在天线阵列平移机构的转丝杠上,所述接近开关46安装在天线阵列平移机构的外壳上,接近开关感应板安装在天线阵列平移机构的外壳上;通过直线光栅尺和直线光栅读数头实现对天线安装转接组件移动位移的测量,通过接近开关实现天线阵列平移机构的限位保护。
16.进一步的,所述转动角度检测组件包括圆光栅尺、圆光栅读数头、限位开关感应板和限位开关,所述圆光栅尺安装在圆光栅尺安装板上,所述圆光栅读数头安装在读数头安装板上,所述的圆光栅尺安装板和读数头安装板均安装在安装架的外侧,通过圆光栅尺和圆光栅读数头,利用光电感应实现对水平转轴实际转动角度的测量;在水平转轴上安装限位开关感应板,在水平转轴上安装限位开关,通过限位开关实现天线阵列转动机构的限位保护。
17.进一步的,所述第一真空步进电机和丝杠分别设置三个,且三个丝杠平行布置,每
个第一真空步进电机带动一个丝杠转动,每个丝杠上安装一个天线安装转接组件。
18.进一步的,在竖直传动轴和水平转轴的两端分别设置一轴承支撑。
19.相对于现有技术,本发明所述的一种适用于穿舱结构的宽频段小型化天线阵列吊装机构具有以下优势:
20.1、本技术的宽频段小型化天线阵列吊装通过多种机构的配合使得天线阵列可进行平移、转动、摆动及升降运动。
21.2、本技术利用穿舱结构,不依赖于真空腔室的强度,在保证天线阵列运动的同时也可实现天线阵列的独立吊装。
22.3、本技术的天线阵列吊装机构保护真空腔室免受运动机构的挤压变形。
附图说明
23.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
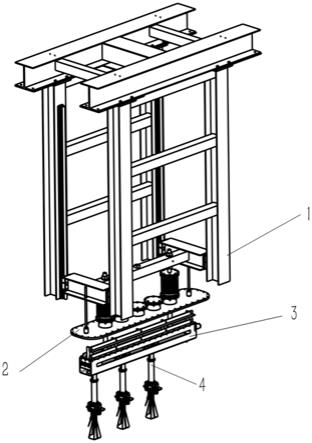
24.图1为本发明实施例所述的一种适用于穿舱结构的宽频段小型化天线阵列吊装机构的立体结构示意图;
25.图2为本发明实施例所述的一种适用于穿舱结构的宽频段小型化天线阵列吊装机构的主视图;
26.图3为本发明实施例所述的天线阵列提升机构的主视图;
27.图4为本发明实施例所述的天线阵列提升机构的侧视图;
28.图5为天线阵列穿舱机构的结构示意图;
29.图6为天线阵列平移机构的仰视图;
30.图7为天线阵列平移机构的俯视图;
31.图8为图7是s-s向剖视图;
32.图9为天线阵列平移机构的立体结构示意图;
33.图10为天线阵列转动机构的主视图;
34.图11为图10的a-a向剖视图;
35.图12为图11的b处放大图;
36.图13为天线阵列转动机构的立体结构示意图。
37.附图标记说明:
38.1-天线阵列提升机构,2-天线阵列穿舱机构,3-天线阵列平移机构,4-天线阵列转动机构,5-横梁,6-滑轨安装板,7-竖向滑轨,8-起吊板,9-电动葫芦,10-吊耳,11-中空法兰段,12-拉杆法兰,13-波纹管,14-连接杆,15-穿舱盲法兰,16-盲法兰,17-安装底板,18-左侧板,19-右侧板,20-导轨,21-丝杠,22-第一联轴器,23-第一真空步进电机,24-电机安装板,25-c/f天线安装组件,26-e天线安装组件,27-第二真空步进电机,28-第二联轴器,29-电机安装座,30-外套管,31-竖直传动轴,32-安装架,33-第二锥齿轮,34-天线连接板,35-水平转轴,36-接近开关感应板,37-直线光栅尺,38-直线光栅读数头,39-圆光栅尺,40-圆光栅读数头,41-限位开关感应板,42-限位开关,43-第一锥齿轮,44-圆光栅尺安装板,45-读数头安装板,46-接近开关。
具体实施方式
39.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
40.下面将参考附图并结合实施例来详细说明本发明。
41.如图1-图13所示,一种适用于穿舱结构的宽频段小型化天线阵列吊装机构,包括天线阵列提升机构1、天线阵列穿舱机构2、天线阵列平移机构3和天线阵列转动机构4,所述的天线阵列提升机构1设置在真空舱外部,所述的天线阵列穿舱机构2穿过真空舱设置,所述的天线阵列平移机构3和天线阵列转动机构均设置在真空舱内部;
42.所述的天线阵列提升机构1带动天线阵列实现竖直方向运动;所述的天线阵列穿舱机构2安装在天线阵列提升机构1上,所述的天线阵列平移机构3安装在天线阵列穿舱机构2上,天线阵列穿舱机构2带动天线阵列实现水平方向上的移动;所述的天线阵列转动机构6安装在天线阵列平移机构3上,天线阵列转动机构4实现天线阵列的转动,本技术涉及的天线阵列是由一个低频振子天线、中频喇叭天线和一个高频介质棒天线组成,根据测量位置不同,定位成三组,每一组都是一个天线阵列。
43.天线阵列提升机构1包括横梁5、滑轨安装板6、竖向滑轨7、起吊板8、电动葫芦9和吊耳10,在横梁5的左右两侧各安装两个滑轨安装板6,在每个滑轨安装板6上分别安装一个竖向滑轨7,在四个竖向滑轨7上配合一起吊板8,通过电动葫芦9带动起吊板8在竖向滑轨7上升降运动,电动葫芦9的钢丝绳穿过位于横梁5上的吊耳10后连接起吊板7。天线阵列提升机构1的工作原理为:电动葫芦9工作,通过钢丝绳带动起吊板7升降,升到到所需位置后,电动葫芦9停止工作。
44.天线阵列穿舱机构2包括拉杆法兰12、波纹管13、连接杆14、穿舱盲法兰15和盲法兰16,拉杆法兰12的上端为拉杆端,下端为法兰端,拉杆法兰12设置两个,且两个拉杆法兰12通过各自的拉杆端对称安装在起吊板8的两侧,在每个拉杆法兰12的法兰端分别连接一中空法兰段11,两个中空法兰段11与穿舱盲法兰15连接,所述的穿舱盲法兰15与真空舱连接,在每个中空法兰段11内穿设一连接杆14,连接杆14的上端固定在拉杆法兰的法兰端,下端穿过穿舱盲法兰15伸入真空舱内,在中空法兰段11上套设波纹管13,在穿舱盲法兰15上设有若干盲法兰16,此机构可以保证提升机构对天线提升时的作用力作用在穿舱法兰上,而波纹管13和拉杆法兰可以保证提升机构的正常运动;本技术的波纹管在穿舱机构中起到缓冲和增大变形余量的作用,波纹管是柔性的,在穿舱结构部位发生形变时(如抽真空)可以有效避免形变带来的真空破坏。
45.天线阵列平移机构3包括安装底板17、左侧板18、右侧板19、导轨20、丝杠21、第一联轴器22、第一真空步进电机23和天线安装转接组件,两个连接杆14的下端均与安装底板17连接;
46.在安装底板17的左右两侧分别安装左侧板18和右侧板19,在右侧板19和左侧板18之间支撑丝杠21,所述的丝杠21通过第一联轴器22与第一真空步进电机23连接,所述第一真空步进电机23通过安装在安装底板17上的电机安装板24支撑,在丝杠21上设置若干天线安装转接组件,且在安装底板17上安装有导向天线安装转接组件直线运动的导轨,在每个天线安装转接组件上安装一天线阵列转动机构4,天线安装转接组件包括两个c/f天线安装组件25和一个e天线安装组件26。天线阵列平移机构3的工作原理为:第一真空步进电机23
带动相应的丝杠21旋转,丝杠21转动带动其上上的天线安装转接组件移动,利用的丝杠螺母配合原理。
47.天线阵列转动机构4包括第二真空步进电机27、第二联轴器28、电机安装座29、外套管30、竖直传动轴31、安装架32、第一锥齿轮43、第二锥齿轮33、天线连接板34和水平转轴35,所述的第二真空步进电机27安装在电机安装座29上,电机安装座29的上端与对应的天线安装转接组件连接,电机安装座29的下端与外套管30的上端连接,外套管30的下端与安装架32连接,所述的竖直传动轴31设置在电机安装座29和外套管30内,竖直传动轴31的上端通过第二联轴器28与第二真空步进电机27连接,下端连接第一锥齿轮43,所述的第一锥齿轮43与第二锥齿轮33啮合,第二锥齿轮33安装在水平转轴35上,所述的水平转轴35穿设支撑在安装架32内,在水平转轴35上安装天线连接板。天线阵列转动机构4的工作原理为:第二真空步进电机27带动相应的竖直传动轴31转动,竖直传动轴31上的第一锥齿轮43与水平转轴35上的第二锥齿轮33啮合,将转动传递至水平转轴35,水平转轴35转动带动其上的天线连接板转动,从而带动相应的天线组运动。
48.在天线阵列平移机构3上设有平移位移检测组件,在天线阵列转动机构4上设有转动角度检测组件;
49.平移位移检测组件包括接近开关46、接近开关感应板36、直线光栅尺37和直线光栅读数头38,所述直线光栅尺37安装在天线阵列平移机构3的安装底板17上,所述直线光栅读数头38通过内六角螺钉安装在天线阵列平移机构3的转丝杠21上,所述接近开关46安装在天线阵列平移机构3的外壳上,接近开关感应板36安装在天线阵列平移机构3的外壳上;通过直线光栅尺37和直线光栅读数头38实现对天线安装转接组件移动位移的测量,通过接近开关46实现天线阵列平移机构3的限位保护。
50.转动角度检测组件包括圆光栅尺39、圆光栅读数头40、限位开关感应板41和限位开关42,所述圆光栅尺39安装在圆光栅尺安装板44上,所述圆光栅读数头40安装在读数头安装板45上,所述的圆光栅尺安装板44和读数头安装板45均安装在安装架的外侧,通过圆光栅尺39和圆光栅读数头40,利用光电感应实现对水平转轴35实际转动角度的测量;在水平转轴35上安装限位开关感应板41,在水平转轴35上安装限位开关42,通过限位开关42实现天线阵列转动机构4的限位保护。
51.第一真空步进电机和丝杠分别设置三个,且三个丝杠平行布置,每个第一真空步进电机带动一个丝杠转动,每个丝杠上安装一个天线安装转接组件。在竖直传动轴31和水平转轴35的两端分别设置一轴承支撑。
52.本技术是三个天线组(c、e、f)共同的吊装机构,每个天线组均由三个天线组成的阵列,在吊装时是三个天线组一起吊装,但是移动、转动、摆动是可以独立控制;本技术具体使用时,在连接板上连接相应的天线后,通过天线阵列提升机构1带动三个天线组同时升降,通过天线阵列平移机构3对所需移动的天线组平移和通过天线阵列转动机构4对所需转动的天线组转动,将每个天线组调节到所需位置后,三个天线开始工作。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1